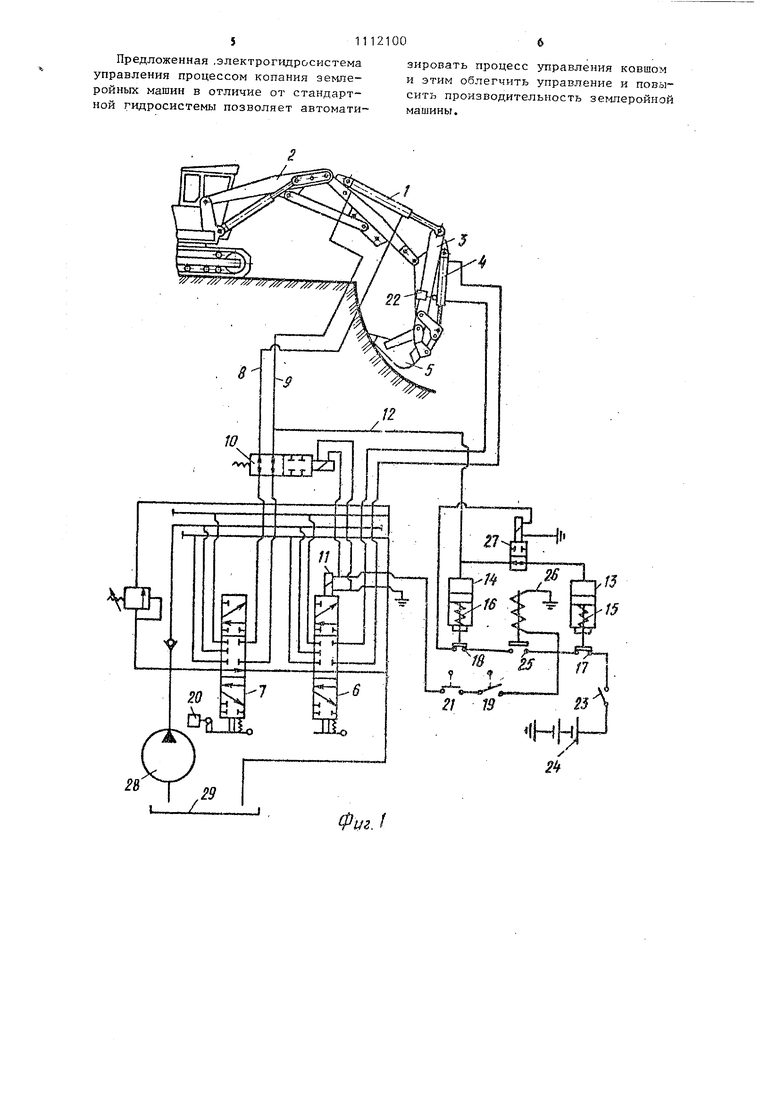
1 . Изобретение относится к землерой ным машинам цикличного действия, а именно к гидросистемам управления процессами копания одноковшовыми экс каваторами, фронтальными погрузчиками, скреперами. Наиболее близкой к изобретению является электрогидросистема управле ния процессом копания, содержащая гидроцилиндр-задатчик, исполнительньм гидроцилиндр с распределителем, электрогидравлический датчик верхне го значения сигнала управления, связанный с электроконтактами электроце пи управления распределителем исполнителыюго гидрощшиндра Г1 . Недостаток известной электрогидро системы заключается D том, что она не позволяет регулировать неравномерность сигнала управления, так как не позволяет измерять его нижнее значение. Управление процессом копания только по верхнему значению сигнала управления приводит к частым включениям и выключениям золотника распределителя, увеличению энергоемкости процесса, снижению про изводительности. Целью изобретения является повыше ние производительности зе шеройной машины путем регулирования неравномерности сигнала управления. Поставленная цель достигается тем, что электрогидросистема управления процессом копания землеройной машины цикличного действия, включающая гидроцилиндр-задатчик. исполнительный гидроцилиндр с распределителем, электрогидравлический датчик верхнего значения сигнала управления, связанный с электроконтактами электроцепи управления распределителем исполнительного гидрогц-шиндра снабжена, электрогидравлическим датч ком нижнего значения сигнала управления, соединенным посредством блокирующего электроуправляемого золот ника с датчиком верхнего значения сигнала управления, и электромагнитом, при этом катушка последнего и электроуправление блокирующего золо ника связаны с электродепью управле ния распределителем исполнительного гидрои 1линдра, которая снабжена дополнительными электроконтактами, cвязaнныlv и сос1тветственно с сердечником электромагнита и с датчиком нижнего значения сигнала управления 0.. Принципиальное отличие изобретения от известных устройств состоит в дополнительном измерении нижнего значения сигнала управления, что позво-ляет независимо регулировать и настраивать верхний и нижний пределы сигнала управления, уменьшить благодаря этому энергоемкость процесса копания и повысить производительность земле-ройной машины. На фиг, 1 показана электрогидросистема управления процессом копания з.емлеройной машины на примере экскаватора; на фиг. 2 - диаграмма управления процессом копания землеройной машины, . ГидpoциJП- ндpы 1 поворота рукояти шарнирно соединены со стрелой 2 и рукоятью 3, Гидроцилиндры 4 поворота ковша шарнирно соединены с рукоятью 3 и ковшом 5. Распределитель 6 поворота ковша подключен к рабочим полостям гидроцилиндров А, Распределитель 7 поБоро7а рукояти подключен гидромагистраля№-1 8 и 9 к рабочим полостям гидроцилиндров 1 поворота рукояти,, В гидромагистрали 8 и 9 включен дополнительна электрораспределитель 10. Золотник распределителя б соединен с электрокагнитом 11, При помощи гидромагистрали 12 к рабочей полости гидроцилиндра 1 подключен датчик 13 верхнего значения сигнала управления и датчик 1 нижнего значения сигнала управления. Датчики 13 и 14 имеют пружины 15 и 16. Исполнительные элементы датчиков 13 и 14 соединены с электроконтактами 17 и 18 электроцепи электромагнита 11, в которую таю-к-е включены электроконтакты 19 электропереключателя 20, связанного с рукояткой золотника распределителя 7, электроконтакты 21 конечного электровыключателя 22, установленного на рукояти 3, контакты электровыключателя 23 и источник 24 электропитания. Электроконтакты 25 соединены с электромагнитом, катушка 26 которого подключена параллельно к электроцепи. Блокируюощй электрозолотник 27 подключен к гидромагистрали 12. В гидросистему включены гидронасос 29 и гидробак 29. Диаграмма процесса копания грунта экскаватором (фиг, 2) характер1- зует зависимость сигнала управления Р от времени t, точки на днаграг-тме определяют следующие состояния процесса копания: О начало процесса копаггия поворотом рукояти, А окончание поворота рукояти и начало поворота ковша, В - окончание поворота ковша и начало поворота рукояти, С - окончание поворота рукояти, начало поворота, ковша, D - окончание процесса копания. На диаграмг-ie (фиг, 2) максимальное значение сигнала управления, Pfrtin минимальное значение сигнала управления. Гидросистема управления процессом копания работает следующим образом. Установка ковша 5 в исходную точку забоя для осуществления процесса копания грунта производится так же, как и у экскаватора со стандартной Г -щросистемой. Для начала копания замь кается контакт 23 электровыключателя и включается вверх гидр.озоло ник распределителя 7 поворота рукояти. Одновременно с включением золотника распределителя происходит сраб тывание электропереключателя 20 и замыкание электроконтактов 19. Из гидробака 29 гидронасос 28 начинает подавать рабочую жидкость по гидро- магистрали 9 в поршневые полости гидроцилиндров 1 поворота рукояти. Поворотом рукояти 3 осуществляется внедрение зубьев ковша 5 в грунт. При этом возрастает усилие на ковше и давление в поршневых полостях гид роцилиндров 1-, которое используется в качестве сигнала для управления 1КОВШОМ. На диаграмме (фиг. 2) этому этапу процесса копания соответствует участок 0-А. Сигнал давления по гидромагист- рали 12 передается к датчикам 13 и 14. При давлении Pfni, датчик 14 з мыкает электроконтакты 18, а при да нейшем повьш ении давления до значения Рц7С1Х замыкаются электроконтакты 17. В этот момент оказывается по ключенной к источнику 24 электропитания катушка 26 электромагнита, ко торый замыкает электроконтакты 25. При этом одновреме} но срабатывает т же блокирующий электрозолотник 27, который выполняет операцию запомина ния значения сигнала управления в рабочей полости датчика 13. Одновременно при замыкании указанных ко тактов оказываются замкнутыми электрические цепи электрораспределителя 10 и электромагнита 11. Золотник электрораспределителя 10 перемещается влево, запирая рабочие полости гидроцилиндров 1 поворота ковша. При этом золотник распределителя 6 электромагнитом 11 автоматически перемещается вверх и рабочая жидкость гидронасосом 28 из гидробака 29 подается к поршневым полостям гидроцилиндров 4. Ковш 5 поворачивается по часовой стрелке, осуществляя процесс копания. ТТри повороте ковша давление в поршневых полостях гидроцилиндра 1 падает. Этот этап процесса копания соответствует участку А-В диaгpa r fы (фиг. 2). Поворот ковша происходит до тех пор, пока сигнал давле.1П1я не достигает значения Pmin которому соответствует точка В диаграммы (фиг. 2). При давлении датчик 14 размыкает электроконтакты 18 и размыкает электрические цепи электрораспределителя 10 и электромагнита 11. Электрораспределитель 10 устанавливается в открытое положение, а золотник распределителя 6 - в запертое положение. С этого момента снова начинается поворот рукояти и происходит увеличение давления в поршневых полостях гидроцилиндров 1. Этому этапу процесса копания соответствует участок В-С диаграммы (фиг. 2). Когда значение сигнала управления достигает величины (в точке С диаграм 1ы, фиг. 2), срабатывает датчик 13, замыкая электроконтакты 17. i Далее, как и в описанном ранее случае, прекращается поворот рукояти и начинается поворот ковша. Процесс копания грунта осуществляется путем чередования поворотов рукояти и ковша до момента срабатывания конечного выключателя 22 поворота ковша. В этот момент размыкаются электроконтакты 21 и все электрические элементы системы приводятся в исходное состояние. В течение всего времени процесса копания грунта оператор удерживает золотнрк 7 во включенном состоянии, а процесс управления движением ковша совершается автоматически. После , окончания процесса копания оператор отпускает золотник распределителя 7, который своей пружиной устанавливается в запертое положение. Предложенная .электрогидросистема управления процессом копания землеройных машин в отличие от стандартной гидросистемы позволяет автоматиэировать процесс управления ковшом и этим облегчить управление и повысить производительность землеройной машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод отвала бульдозера (его варианты) | 1984 |
|
SU1183632A1 |
| Гидравлический привод рабочего оборудования одноковшового экскаватора | 1982 |
|
SU1134678A1 |
| Гидропривод отвала бульдозера | 1988 |
|
SU1548369A1 |
| Гидропривод погрузчика | 1982 |
|
SU1084392A1 |
| Бульдозер | 1981 |
|
SU962481A1 |
| Гидропривод управления рабочим оборудованием фронтального погрузчика | 1982 |
|
SU1065556A1 |
| Способ управления рабочим процессом землеройной машины | 1985 |
|
SU1263775A1 |
| Рабочее оборудование экскаватора | 1987 |
|
SU1472587A1 |
| Гидропривод рабочего оборудования погрузчика | 1989 |
|
SU1666666A1 |
| Гидропривод землеройной машины | 1980 |
|
SU1036862A1 |

ЭЛЕКТРОГИДРОСИСТЕМА УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ЗЕМЛЕРОЙНОЙ МАШИНЫ ЦИКЛИЧНОГО ДЕЙСТВИЯ, включающая гидроцилиндр-задатчик, исполнительный гидроцилиндр с распределителем, электрогидравлический датчик верхнего значения сигнала управления, связанный с электроконтактами электроцепи управления распределителем исполнительного гидроцилиндра, отличающаяся тем, что, с целью повышения производительности машины,, она снабжена электрогидравлическим датчиком нижнего значения сигнала управления, соединенным посредством блокирующего электроуправляемого золотника с датчиком верхнего значения сигнала управления, и электромагнитом, при этом катушку последнего и электроуправление блокирующего золотника связаны с электроцепью управления распределителем исполнительного гидроцилиндра, которая i снабжена дополнительными электроконтактами, связанньп ш соответственно с (Л сердечником электромагнита и с датчиком нижнего значения сигнала управления .
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 3407364, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
