Изобретение относится к строительно-дорожным машинам, в частности имеющих устройства для переоборудования прямой лопаты на обратную.
Цель изобретения - повышение производительности за счет повышения надежности работы при переоборудовании с прямой лопаты на обратную и наоборот.
На фиг. 1 представлен вариант рабочего оборудования прямой лопаты; на фиг. 2
гидроцилиндра 2 на тягу 3, закрепленную шарнирно с верхним фланцем неподвижной части 8. Поворот опорно-поворотного круга 4 с закрепленным ковшом 5 происходит относительно рукояти 1 вокруг оси пальца 6. При замене рабочего оборудования с обратной лопаты на прямую и наоборот оператор экскаватора воздействует на трехпо- зиционный золотниковый распределитель 24 (фиг. 6), при этом происходит подача рато же, обратной лопаты; на фиг. 3 - кон- 10 бочей жидкости в одну из гидромагистра- струкция поворотного приспособления, раз-лей 25 и рабочую полость гидродвигарез; на фиг. 4 - разрез А-А на фиг. 3;теля 14. В начальный момент времени
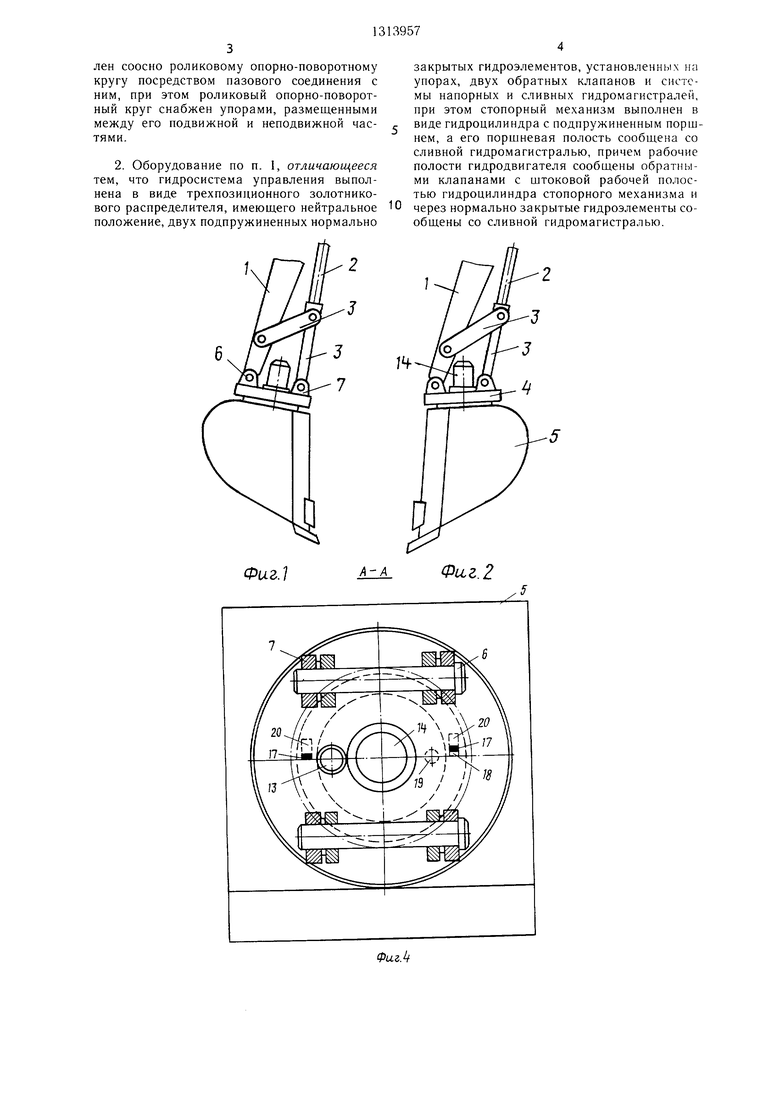
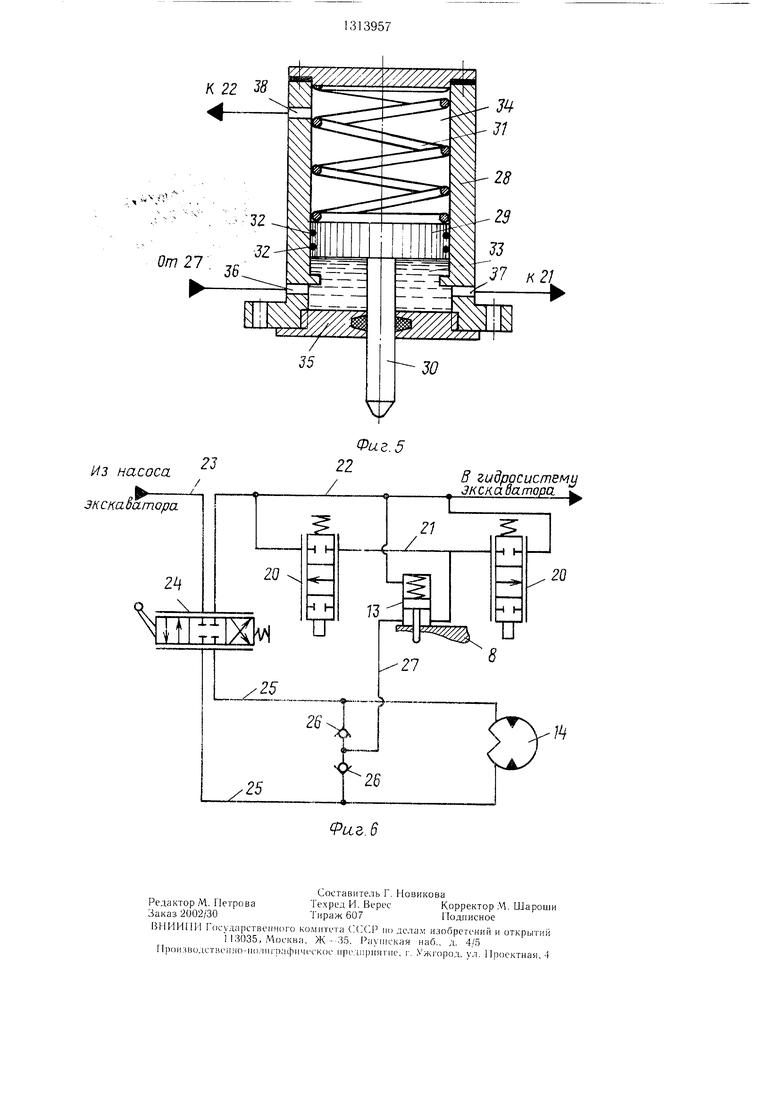
на фиг. 5 - стопорный механизм; на фиг. 6 -движения поворота роликового опорно-повогидравлическая схема управления.ротного устройства 4 не происходит ввиду
Рабочее оборудование одноковшового гид- того, что шток 30 гидроцилиндра стопор- равлического экскаватора содержит руко-ного механизма 13 находится в одном из
ять 1, гидроцилиндр 2 управления ковшом, тяги 3, опорно-поворотный круг 4 и ковш 5. Рукоять соединена с ковшом посредством пальцев 6 и проушин 7, приваренных к неподвижной части опорно-поворотного круга 4 20 ный момент происходит открывание сто- являющегося механизмом поворота ковша.порного механизма, а затем поворот ковша.
Опорно-поворотный круг 4 содержит непод-Пружина 31 цилиндра стопора находится в
вижную часть, состоящую из верхнего 8 иразжатом состоянии и воздействует на порнижнего 9 фланцев, соединенных между со-шень 29 и шток 30. С мгновенным росбой болтами 10, подвижную часть 11,том рабочего давления происходит открыроликовый сепаратор 12, стопорный меха- 25 . одного из обратных клапанов 26, ра- низм 13 и гидродвигатель 14. Вал 15 гидро-бочее давление воздействует на поршень 29,
двигателя соединен с подвижной частью 11при этом происходит сжатие пружины 31 и выпосредством пазового соединения 16.ход штока 30 из паза. Ковш 5 начинает
На верхнем фланце 8 неподвижной час-поворачиваться. При этом происходит отжати опорно-поворотного круга 4 расположе-тие трехпозиционных распределителей 20.
ны предохранительные упоры 17, а на под- При повороте ковша на 180° толкатели трехотверстий 19 для фиксации ковша. Рабочее давление, требуемое для поднятия стопорного механизма, меньше, чем для осуществления поворота ковша. Поэтому в начальвижной части 11 - предохранительный упор 18 и два отверстия 19 для фиксации ковша.
На предохранительных упорах 17 (фиг. 6) крепятся трехпозиционные нормально закрытые гидроэлементы - подпружиненные золотниковые распределители 20, соединенные между собой гидромагистралью 21 слива и со сливной гидромагистралью 22 экскаватора. Напорная гидромагистраль 23 экскава35
позиционных распределителей 20 упираются в упоры 18, при этом происходит плавное перемещение, и в момент соединения золотниковым каналом гидромагистрали 21 с гидромагистралью 22 под действием силы сжатия пружины 31 стопорного механизма 13 рабочая жидкость вытесняется из штоковой полости - происходит фиксация ковша 5 посредством штока 30, который заходит в отверстие 19 для фиксации ковтора через трехпозиционный золотниковый 40 ша. В этот момент трехпозиционные распре- рае предел итель 24 управления соединена сделители находятся в своем нормальном (ра- рабочей полостью гидродвигателя 14 посредством гидромагистрали 25 и через обратные клапаны 26 и гидромагистраль 27 с рабочей штоковой полостью гидроцилиндра стопорного механизма 13, которая в свою оче 45 редь связана гидравлически с гидромагистралью 21, и распределители 20 со сливной гидромагистралью 22.
Стопорный механизм 13 (фиг. 5) состоит
зомкнутом) состоянии. Гидросистема вновь готова к работе. При реверсе ковша происходит процесс, аналогичный описанному.
Формула изобретения
из корпуса 28, поршня 29, штока 30, пру1. Рабочее оборудование одноковшового экскаватора, включающее рукоять, шарнирно связанный с ней ковш, механизм поворота ковша с гидродвигателем и стопоржины 31 сжатия, уплотнений 32, рабочей ным механизмом, отличающееся тем, что, с полости 33, дренажной полости 34 и фланго-целью повышения производительности за
вой крышки 35. Корпус 28 имеет входной штуцер 36, выходной штуцер 37 и штуцер 38
счет повышения надежности работы при переоборудовании с прямой лопаты на об- дренажа.ратную и наоборот, механизм поворота ковРабочее оборудование экскаватора рабо- ша выполнен в виде роликового опорно- тает следующим образом.поворотного круга, имеющего гидросистему
Процесс копания рабочим оборудованиемуправления, а гидродвигатель выполнен в
происходит посредством воздействия штокавиде моментного гидроцилиндра и установ того, что шток 30 гидроцилиндра стопор- ного механизма 13 находится в одном из
ный момент происходит открывание сто- порного механизма, а затем поворот ковша.
отверстий 19 для фиксации ковша. Рабочее давление, требуемое для поднятия стопорного механизма, меньше, чем для осуществления поворота ковша. Поэтому в началь
позиционных распределителей 20 упираются в упоры 18, при этом происходит плавное перемещение, и в момент соединения золотниковым каналом гидромагистрали 21 с гидромагистралью 22 под действием силы сжатия пружины 31 стопорного механизма 13 рабочая жидкость вытесняется из штоковой полости - происходит фиксация ковша 5 посредством штока 30, который заходит в отверстие 19 для фиксации ковша. В этот момент трехпозиционные распре- делители находятся в своем нормальном (ра-
ша. В этот момент трехпозиционные распре- делители находятся в своем нормальном (ра-
зомкнутом) состоянии. Гидросистема вновь готова к работе. При реверсе ковша происходит процесс, аналогичный описанному.
Формула изобретения
ша. В этот момент трехпозиционные распре- делители находятся в своем нормальном (ра-
1. Рабочее оборудование одноковшового экскаватора, включающее рукоять, шарнирно связанный с ней ковш, механизм поворота ковша с гидродвигателем и стопор ным механизмом, отличающееся тем, что, с целью повышения производительности за
лен соосно роликовому опорно-поворотному кругу посредством пазового соединения с ним, при этом роликовый опорно-поворотный круг снабжен упорами, размещенными между его подвижной и неподвижной частями.
2. Оборудование по п. I, отличающееся тем, что гидросистема управления выполнена в виде трехпозиционного золотникового распределителя, имеющего нейтральное положение, двух подпружиненных нормально
закрытых гидроэлементов, установленных на упорах, двух обратных клапанов и системы напорных и сливных гидромагистралей, при этом стопорный механизм выполнен в виде гидроцилиндра с подпружиненным поршнем, а его порщневая полость сообщена со сливной гидромагистралью, причем рабочие полости гидродвигателя сообщены обратными клапанами с щтоковой рабочей полостью гидроцилиндра стопорного механизма и через нормально закрытые гидроэлементы сообщены со сливной гидромагистралью.
Фиг./
А-А
Фи.г.2
К 22 38
От 27:
из насоса
2д
экскаватора
В гидросистемц зкскабатора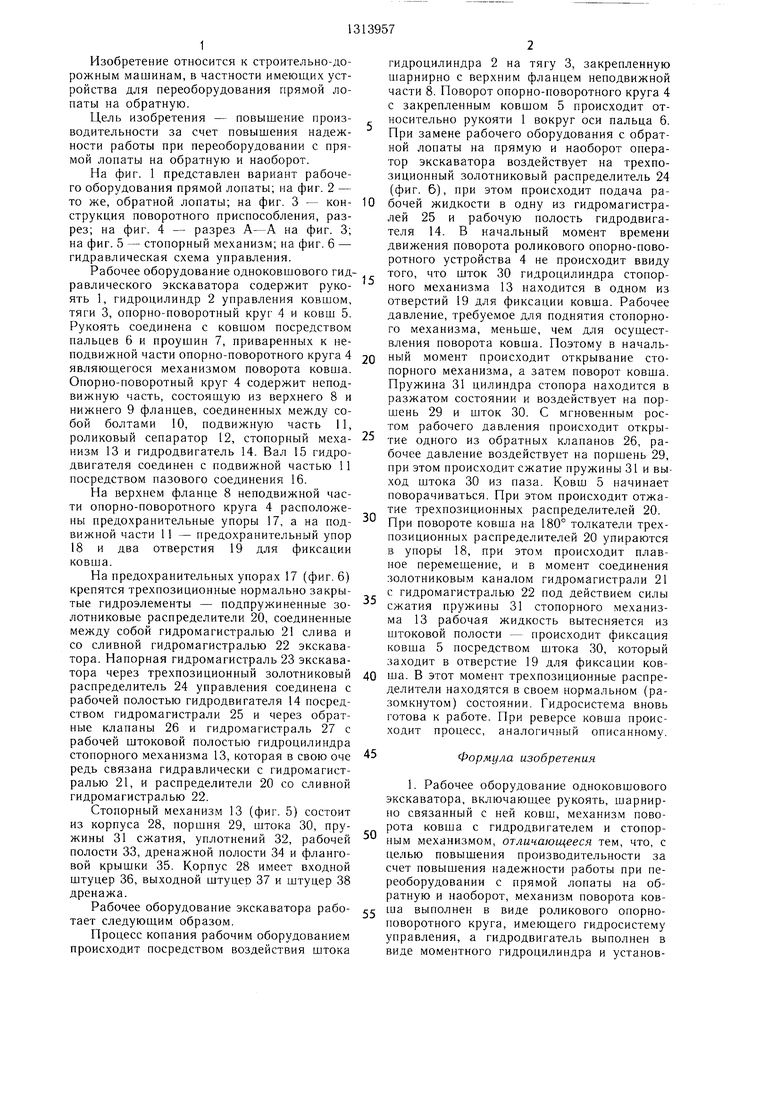
| название | год | авторы | номер документа |
|---|---|---|---|
| Самоходный гидравлический экскаватор | 1984 |
|
SU1313956A1 |
| Рабочее оборудование экскаватора | 1987 |
|
SU1472587A1 |
| Рабочее оборудование одноковшового экскаватора | 1981 |
|
SU950861A1 |
| Одноковшовый экскаватор | 1989 |
|
SU1714048A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1998 |
|
RU2149951C1 |
| Гидропривод рабочего оборудования одноковшового экскаватора | 1982 |
|
SU1134679A1 |
| Гидропривод одноковшового экскаватора | 1986 |
|
SU1362795A1 |
| ЭКСКАВАТОР | 1991 |
|
RU2012724C1 |
| Одноковшовый экскаватор | 1990 |
|
SU1763586A1 |
| Гидравлический привод грузоподъем-НОй МАшиНы | 1979 |
|
SU796333A1 |
Изобретение относится к строительно- дорожным машинам и позволяет повысить производительность за счет повышения надежности работы при переоборудовании с прямой лопаты на обратную и наоборот. Оборудование содержит рукоять 1, шарнир- но связанный с ней ковш 5 и механизм поворота ковша 5 с гидродвигателем (ГД) 14 в виде моментного гидроцилиндра и со стопорным механизмом (СМ) 13 в виде гидроцилиндра с пОлТ,пружиненным поршнем. Механизм поворота ковша 5 выполнен в виде роликового опорно-поворотного круга (ОПК). имеюн1,его систему гидроуправления. Причем 14 установлен соосно ОПК посредством пазового соединения с ним. Между подвижной 11 и неподвижной 8 частями О ПК размещены упоры 17 и 18. Система гидроуправления содержит трехпозици- онный золотниковый распределитель, имеющий нейтральное положение, два подпружиненных нормально закрытых гидроэлемента, установленные на упоре 17, два обратных клапана и систему напорных и сливных магистралей. При переоборудовании с прямой лопаты на обратную и наоборот оператор воздействует на золотниковый распределитель и рабочая жидкость подается в рабочую полость ГД 14. Рабочие полости ГД 14 сообш,ены обратными клапанами со штоко- вой рабочей полостью СМ 13 и через нормально закрытые гидроэлементы сообщены со сливной гидромагистралью. Поршневая полость СМ 13 сообщена со сливной гидромагистралью. В начальный момент времени происходит отрывание СМ 13. Затем ковш 5 начинает поворачиваться и происходит отжатие гидроэлементов. При повороте ковша 5 на 180° толкатели гидроэлементов упираются в упоры 18, происходит их плавное перемещение и штоковая полость СМ 13 соединяется со сливной магистралью. Происходит фиксация ковща 5 посредством штока СМ 13. 1 з.п. ф-лы, 6 ил. (О (Л со оо ;о СП -Г фиеЗ
гц
CpLLZ.e
Составитель Г. Новикова
Редактор М. ПетроваТехред И. ВересКорректор A V Шароши
Заказ 2002/30Тираж 607Иодиисное
ВНИИ11И Государственного комитета (ХХ ,1 ио делам изобретений и открыти)
1 13035, .Москва, Ж--35. Раучиская иаб., д. 4/5 Г|рои.чводствен |о-11о,иигра((1ич1 скос иредпрпятие, г. Ужгород, y,i. Проектная,-}
| Гидравлический одноковшовый экскаватор | 1979 |
|
SU823503A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ ПОЛУЧЕНИЯ МИКРОКАПСУЛ АМИНОКИСЛОТ В КСАНТАНОВОЙ КАМЕДИ | 2014 |
|
RU2558859C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
