Изобретение относится к цифровой вычислительной технике и может быть использовано в качестве периферийного процессора.
Цель изобретения - расширение класса решаемых задач за счет возможности произвольного задания результирующей оси вращения вектора.
На фиг. 1 представлена функциональная схема устройства; на фиг. 2- вариант выполнения блока управления.
Устройство содержит регистры 1-6, сумматоры-вычитатели 7-12, блоки 13-18 умножения, дешифратор 19, счетчик 20, блок 21 управления, входы 22X1 Хсозб +c(l-cos0)(o(X + Y - Ycosfi +(i(i -со80)(р/Х + Z1 ZcosQ +3(1-cos0) (ofX +
24 задания координат устройства, входы 25-27 задания шагов вращения по соответствующим углам устройства, вход 28 задания угла устройства, вход 29 знака направления ъращения, вход 30 запуска устройства, выходы 31-33 координат устройства, выход 34 сигнала окончания преобразования. Блок 21 управления содержит триггеры 35-37 знака направляющих косинусов, элемент НЕ 38, элементы И 39-47.
Устройство работает по следующему алгоритму.
Кватернионное преобразование
/3 Y + j-Z) + (pZ - Yjsine, pY + yZ)+(}-X -of Z)sin6 (1) /JY + f Z) + (c(Y -p X)sin6
3- 1472902
выполняется путем вращения вектора
R (X,Y,Z) в соответствии с алгоритмом
Х- +AJ(Y|dj-A/} , i , , (2) Z, , W , Л
Y ,
- координаты вектора Х, Y, Z, развернутого
вокруг оси вращения на угол б)
Л, р
2 - компоненты единичного
вектора, задающего ось вращения так, что о(+ + рг + у2 1 .
В алгоритме (2) шаги вращения вокруг осей прямоугольной системы координат равны
| название | год | авторы | номер документа |
|---|---|---|---|
| Вычислительное устройство | 1983 |
|
SU1167604A1 |
| АРИФМЕТИЧЕСКОЕ УСТРОЙСТВО | 2004 |
|
RU2268482C1 |
| Вычислительное устройство | 1983 |
|
SU1164696A1 |
| Устройство для преобразования координат вектора в трехмерном пространстве | 1986 |
|
SU1403062A1 |
| Устройство для цифровой обработки сигналов | 1985 |
|
SU1336028A1 |
| МАТРИЧНЫЙ СПЕЦПРОЦЕССОР | 1994 |
|
RU2079879C1 |
| Вычислительное устройство | 1988 |
|
SU1522196A1 |
| Устройство для поворота вектора | 1983 |
|
SU1132285A1 |
| Вычислительное устройство | 1986 |
|
SU1361546A1 |
| Вычислительное устройство | 1988 |
|
SU1508208A1 |
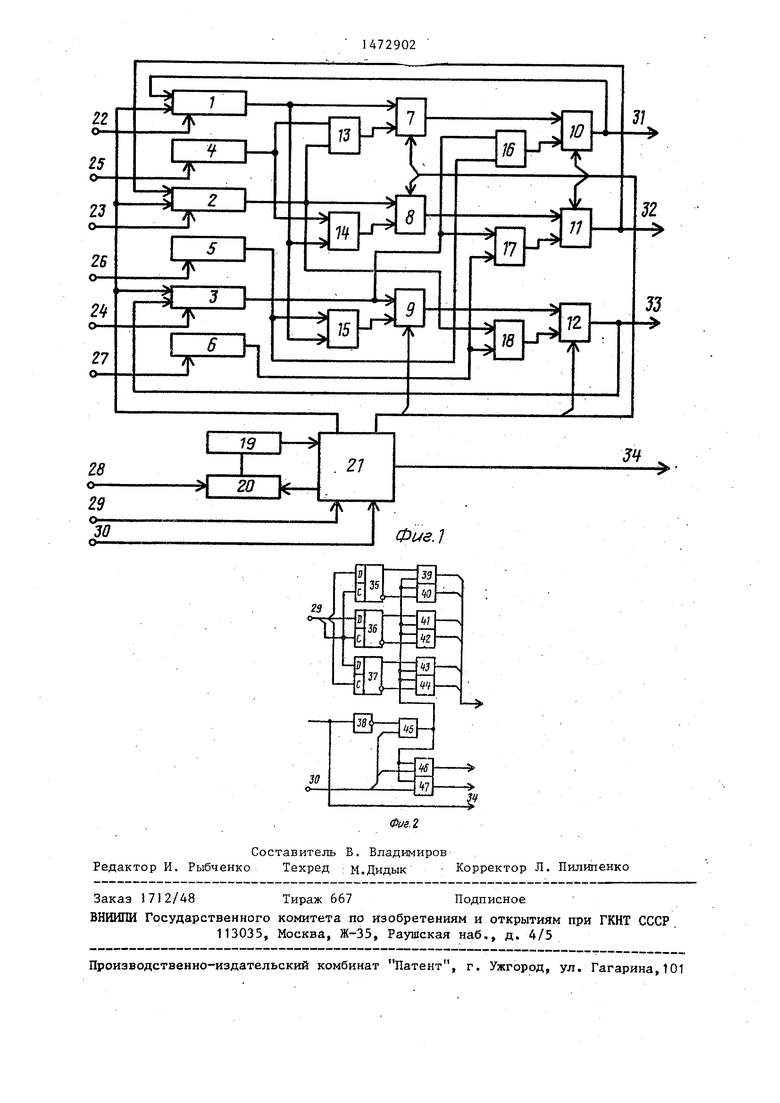
Изобретение относится к цифровой вычислительной технике и может быть использовано в качестве периферийного процессора, в котором выполняется операция вращения вектора, а вспомогательные вычисления выполняются в центральной ЭВМ. Цель изобретения - расширение класса решаемых задач за счет возможности произвольного задания результирующей оси вращения вектора. Для этого в устройство введены три регистра и шесть блоков умножения. При этом обеспечивается одновременное вращение вектора вокруг трех осей, причем шаги вращения вокруг каждой из осей различны. В результате достигается эффективное решение задач, описываемых математическим аппаратом кватернионов. 2 ил.
йо(
2-т,
АР
А signt/, Лр sign/} , Л,« sign j (4)
Вращение выполняется в блоке поворота вектора, образованном регистрами 1-6, сумматорами-вычитателями 7-12 и блоками 13-18 умножения. Отработка угла 0 осуществляется по алгоритму
Э;,
0; -2
Мм - v (5)
Устройство работает следующим образом .
Перед началом вычислений в регистры 1-3 заносятся координаты X, Y, Z( являющиеся начальными данными для алгоритма (2), в регистры - шаги вращения до/, &f , Ду, в счетчик 20 - угол бив блок 21 управления (по входу 29) - знаки направляющих косинусов оси вращения (4). Информация по входам 22-29 сопровождается соответствующими стробами.
По сигналу начала вычислений, по- ступающему по входу 30, в блоке 21 управления вырабатываются сигналы синхронизации регистров 1-3, по которым производится запись очередных приближений Xf-м, X ,-+1 , Z ,-+.,, и сигналы управления режимами работы сумма- торов-вычитателей 7-12 /V , Л , /|„ В блоках 13-18 умножения вычисляются частичные произведения Y,- d j, X t -4 ,
. X.-d/Ь, Zj d/3, Zpdo(H Y соответ- ственйо. На сумматоре-вычитателе 7 вычисляется величина S{+1 X,- + + , а на сумматоре-вычитателе 10 - координата X +1 S ;+i -ApZj-dp, записываемая в регистр I,- Аналогичным образом на сумматорах- вычитателях 8, И и 9, 12 вычисляются координаты Y;-MH + i записываемые в регистры 2 и 3 соответст
2 т-/3
.-т
Ду-2- 7, (3)
0
5
30
5
40
5
0
5
,-т
венно. В каждой итерации в блоке 21 управления вырабатывается импульс, соответствующий угловому кванту 2 и поступающий на вход.счетчика 20, по которому вычисляется очередное приближение угла (5). После отработки, угла (Sftt+i 0) соабатыва- ет дешифратор i9, по сигналу которого прекращается выработка счетные импульсов , операторов Д/ Л , Л-ji, сигналов синхронизации регистров 1 -3 и на входе 34 выставляется сигнал окончания преббразования. Вычисления заканчиваются. Координаты развернутого вектора х X f+t Y Yf41 Z - вьздаются по выходам 31-33.
Блок 2 управления может быть выполнен по схеме, приведенной на фиг. 2. Перед началом вычислений в -триггеры 35-37 записываются (по вхо- ду 29) знаки направления вращения. |На вход элемента НЕ 38 подается сигнал с дешифратора 19, который появляется при нулевом содержимом счетчика 20, т.е. после окончания разворота вектора. При отсутствии этого сигнала выходом элемента НЕ 38 подготавливается элемент И 45, по второму входу которого (по входу 30) поступает сигнал начала вычислений, По этому сигналу открывается элемент И 45 и на элементах И 39, 40 вырабатываются сигналы ±/( ,, на элементах И 43, 44 - ±АЙ, на элементах И 45, 46 - +А Эти сигналы вырабатываются в соответствии с выражениями (4) и являются сигналами задания режимов работы сумматоров-вы- читателей 7-1 2 (третий выход блока 21 управления). Одновременно на
5
элементе И 46 вырабатываются сигналы синхронизации регистров 1-3 (второй выход блока 21 управления) и счетные импульсы 2 (первый выход блока 21 управления). На вторые входы элементов И 46, 47 (по входу 30) подаются импульсы, соответствующие моментам записи координат X ;+1 , У$ + 1ТУ Z |+1 в регистры I-3 и переключения t счетчика 20. После окончания вычис-- ,лений сигналом 34 должен сниматься , сигнал начала вычислений, поступающий по входу 30 на элемент И 45.
/Формула изобретения
Устройство преобразования координат, содержащее с первого по третий регистры, дешифратор, блок управления, счетчик и с первого по шестой сумматоры-вьнитатели, причем выходы первого, второго и третьего регистров соединены с входами первых операндов соответственно первого, второго и третьего сумматоров-вычита- телей, выходы которых соединены с входами первых операндов соответственно четвертого, пятого и шестого сумматоров-вычитателей, выходы которых являются выходами координат устт ройства и подключены к первым входам соответственно первого, второго и третьего регистров, вторые входы ко- tTopbix являются входами задания координат устройства, вход задания угла которого подключен к информационному входу счетчика, первый и второй входы блока управления соединены с входами соответственно знака направ9026
ления вращения и запуска устройства, а третий вход - с выходом дешифратора, вход которого соединен с вы- ходом счетчика, вход которого соединен с первым выходом блока управления, второй и третий выходы которого подключены к входам синхронизации первого, второго и третьего регистров и входам задания режимов сумматоров-вычитателей соответственно, а четвертый выход блока управления является выходом сигнала окончания, преобразования устройства, о т л и чающееся тем, что, с целью1 расширения класса решаемых задач путем обеспечения возможности произвольного задания результирующей оси -вращения вектора, в него введены с четвертого по шестой регистры и шесть блоков умножения, выходы которых соединены с входами вторых операндов одноименных сумматоров- вычитателей, выход четвертого регистра подключен к первым входам первого и второго блоков умножения, выход пятого регистра соединен с первыми входами третьего и четвертого блоков умножения, выход шестого
регистра - с первыми входами пятого и шестого блоков умножения, выходы первого, второго и третьего регистров подключены соответственно к объединенным попарно вторым входам второго и третьего, первого и шестого, четвертого и пятого блоков умножения, входы четвертого, пятого и шестого регистров соединены с входами задания шагов вращения по соответствующим
углам устройства.
