113
Изобретение относится тс вычисли-i тельной технике и может быть использовано для преобразования координат в трехмерном пространстве.
Цель изобретения - упрощение устройства за счет выполнения поворота вектора с постоянным шагом.
На фиг.1 представлена функциональная схема устройства; на фиг.2 - функ циональная схема блока управления.
Устройство содержит блок 1 поворота вектора, первый 2, второй 3 и третий 4 регистры, первый 5, второй 6 и третий 7 коммутаторы, первый 8, второй 9 и третий IО сзтФ1аторы-вычита- тели, дешифратор 11, счетчик 12, блок 13 управления, вход 14 первого аргумента, вход 15 второго аргумента, вход 16 третьего аргумента, вход 17 четвертого аргумента, вход 18 вида преобразования, группу тактовых входов,19, первый информационный выход 20, второй информационный выход 21, третий информационный выход 22, вьтход 23 сигнала окончания поворота, первую группу выходов .24 блока управления, первый выход 25 блока зшравле
НИН, вторую группу выходов 26 блока управления.
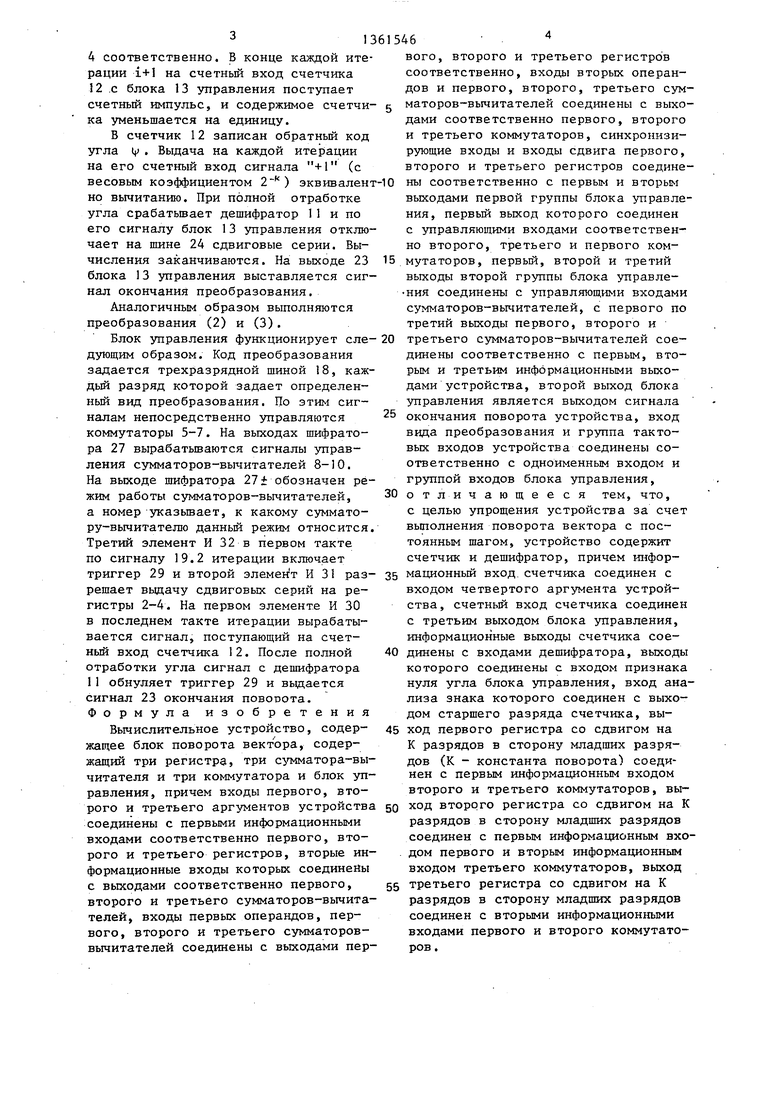
Блок з правления содержит шифратор 27, распределитель 28 импульсов, триггер 29, первый 30, второй 31 и третий 32 элементы И.
Устройство функционирует cлeдyIO- щим образом.
Вычисления в устройстве осуществляются в соответствии с алгоритмами
вращение вокруг оси X на угол v ;
(t 1л
2.
-k
- Л .,. 2 л Щ- 2
-к
-к
,-k
.v/2(1)
,
sign (f
0 при
0при
вращение вокруг оси Y
X
X2i-Vi;
5-х
Yji+v -Y-,, 1(-1 1 AgX/j -2 6,4, 0.- Лб 2-S i 0,1,2...0/2
Чо
X,; Zj,Z,j 00
6 sign 0
О
при
при
вращение вокруг оси Z- на угол :
YS;.. Хз,+Л Узг2- ,
- f X
Y 3Ui - Yл Z jij., Zj ,
;,. - - 2 , i 0,1, 2... /2-,
X,; Yi-o Y
i-c
(3)
30
1.2, IjO
г
sign при E;f 0
e0при
Вращение no алгоритмам (l)-(3) в отличие от традиционных разновиднос- тей алгоритма Волдера осуществляется на всех итерациях i с постоянным шагом L 2. .
Перед началом вычислений в регистры 2-4 по входам 14-16 заносятся Y
координаты X
Z р соответственно, а в счетчик 12 по входу 17 значение угла. Перед вьтолнением каждого из преобразований (1)-(3) на входе 18 выставляется код вида пре5 образования, по которому блок 13 по первому выходу 25 управляет коммутаторами 5-7. Управление режимами рабо- ты сумматоров-вычитателей 8-10 осуществляется по сигналам на второй
Q группе выходов 26 блока 13 управления, вырабатьшаемым на основании знака угла и кода вида преобразования в соответствии с алгоритмами (1)- (3).
Вычисления начинаются по сигналу Работа, постзогающему по входу 19, по которому блок 13 на первой грзшпе выходов 24 вьщает сигналы сдвига информации в регистрах 2-4. При выполнении преобразования (1) коммутатор 5 закрыт, коммутатор 6 соединяет выход регистра 4 (Zj 2) с входом сумматора-вычитателя 9, а когуйчутатор 7 соединяет выход регистра 3 (Y;- 2 ) с входом сумматора-вычитателя 10. На (1+1)-й итерации координаты Х, Y- , Z , с вькодов регистров 2-4 поступают на входы сумматоров-вычитателей 8-10-соответственно. Так как коммутатор 5 закрыт, координата перезапи- сьюается через сумматор-вычитатель 8, оставаясь на всех итерациях неизмен-, ной. На сумматоре-вычитателе 8 вычисляется новое значение координаты Y
0
5
0
-.
5- Y,,,Y,. ,
а на сумматоре-вычитателе 10 - новое
значение координаты
ZH.; Z,;
- Y
которые записьшаются в регистры 3 и
4 соответственно. В конце каждой итерации i+l на счетньш вход счетчика 12 .с блока 13 управления поступает счетный импульс, и содержимое счетчи- ка уменьшается на единицу.
В счетчик 12 записан обратньй код угла V. Выдача на каждой итерации на его счетный вход сигнала +1 (с весовым коэффициентом 2) эквивалент но вычитанию. При полной отработке угла срабатьюает дешифратор 11 и по его сигналу блок 13 управления отключает на шине 24 сдвиговые серии. Вычисления заканчиваются. На выходе 23 блока 13 управления выставляется сигнал окончания преобразования.
Аналогичным образом выполняются преобразования (2) и (3).
Блок управления функционирует еле- дующим образом. Код преобразования задается трехразрядной шиной 18, каждый разряд которой задает определенный вид преобразования. По этим сигналам непосредственно управляются коммутаторы 5-7. На выходах шифратора 27 вырабатьтаются сигналы управления сумматоров-вычитателей 8-10. На выходе шифратора 27f обозначен режим работы сумматоров-вьтитателей, а номер указьшает, к какому суммато- ру-вычитателю данньй режим относится Третий элемент И 32 в первом такте по сигналу 19.2 итерации включает триггер 29 и второй элемен т И 31 раз- решает выдачу сдвиговых серий на регистры 2-4. На первом элементе И 30 в последнем такте итерации вырабатывается сигнал, поступающий на счетный вход счетчика 12. После полной отработки угла сигнал с дешифратора 11 обнуляет триггер 29 и вьвдается сигнал 23 окончания повотэота. Формула изобретения
Вычислительное устройство, содержащее блок поворота вектора, содержащий три регистра, три сз мматора-вы- читателя и три коммутатора и блок управления, причем входы первого, второго и третьего аргументов устройства соединены с первыми информационными входами соответственно первого, второго и третьего регистров, вторые информационные входы которых соединены с вькодами соответственно первого, второго и третьего сумматоров-вычита- телей, входы первых операндов, первого, второго и третьего сумматоров- вычитателей соединены с выходами пер
вого, второго и третьего регистров соответственно, входы вторых операндов и первого, второго, третьего сум- маторов-вычитателей соединены с выходами соответственно первого, второго и третьего коммутаторов, синхронизирующие входы и входы сдвига первого, второго и третьего регистров соединены соответственно с первым и вторым выходами первой группы блока управления, первый выход которого соединен с управляющими входами соответственно второго, третьего и первого коммутаторов, первый, второй и третий выходы второй группы блока управле- ния соединены с управляющими входами сумматоров-вычитателей, с первого по третий выходы первого, второго и третьего сумматоров-вычитателей соединены соответственно с первым, вто
рым и третьим информационными выходами устройства, второй выход блока управления является выходом сигнала окончания поворота устройства, вход вида преобразования и группа тактовых входов устройства соединены соответственно с одноименным входом и группой входов блока управления, отличающееся тем, что, с целью упрощения устройства за счет выполнения поворота вектора с постоянным шагом, устройство содержит счетчик и дешифратор, причем мационный вход, счетчика соединен с входом четвертого аргумента устройства , счетньй вход счетчика соединен с третьим выходом блока управления, информационные выходы счетчика соединены с входами дешифратора, выходы которого соединены с входом признака нуля угла блока управления, вход анализа знака которого соединен с выходом старшего разряда счетчика, выход первого регистра со сдвигом на К разрядов в сторону младших разрядов (К - константа поворота) соединен с первым информационным входом второго и третьего коммутаторов, выход второго регистра со сдвигом на К разрядов в сторону младших разрядов соединен с первым информационным входом первого и вторым информационным входом третьего коммутаторов, вькод третьего регистра со сдвигом на К разрядов в сторону младших разрядов соединен с вторыми информационными входами первого и второго коммутаторов .
J9
Btn.
4(1/.
Редактор Н.Тупица
Составитель С.Куликов
Техред А.Кравчук Корректор Н.Король
Заказ 6291/48 Тираж 671Подписное
ВНИИПИ Государствеиного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственио-полиграфическое предприятие,г.Ужгород,ул.Проектная,4
т
w
J7
74
.г
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МОДУЛЯ ТРЕХМЕРНОГО ВЕКТОРА | 1993 |
|
RU2040039C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ КООРДИНАТ | 1991 |
|
RU2007749C1 |
| Цифровой преобразователь координат | 1981 |
|
SU1076903A1 |
| Вычислительное устройство | 1983 |
|
SU1167604A1 |
| Вычислительное устройство | 1988 |
|
SU1508208A1 |
| Устройство для определения модуля трехмерного вектора | 1983 |
|
SU1142830A1 |
| Вычислительное устройство | 1988 |
|
SU1522196A1 |
| Арифметическое устройство | 1979 |
|
SU826344A1 |
| Конвейерное вычислительное устройство | 1987 |
|
SU1432512A1 |
| Функциональный преобразователь | 1983 |
|
SU1136154A1 |
Изобретение относится к вычислительной технике и может быть применено для преобразования координат в трехмерном пространстве. Целью изобретения является упрощение устройства. Устройство содержит блок 1 поворота вектора,, регистры 2-4, коммутаторы 5-7, сумматоры-вычитатели 8-10, дешифратор 11, счетчик 12,блок 13 управления. Устройство позволяет осуществлять вращение вокруг трех осей в трехмерной системе координат на основе итерационного алгоритма Волдера. В отличие от традиционных разновидностей алгоритма Волдера в устройстве поворот осуществляется с постоянным шагом, что приводит к упрощенной структуре управляющей части устройства. 2 ил. /50 16 о (Л W оо О) ел 4 05 23 tlZ.i
| Арифметическое устройство | 1973 |
|
SU445042A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Вычислительное устройство | 1981 |
|
SU959071A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
