г
Фиг. f
Изобретение относится к вычислительной технике и может быть использовано в специализированных нреобразователях координат вектора в трехмерном пространстве.
Цель изобретения - расширение класса ре1наемых задач за счет обеспечения возможности поворота вектора в трехмерном пространстве.
На фиг. 1 представлена функциональная схема устройства; на фиг. 2 -- схема блока управления.
Устройство содержит блок 1 поворота вектора, первый 2, второй 3 и третий 4 регистры с первого по шестой сум.маторы-вы- читатели 5--10, первый И, второй 12 и третий 13 счетчики, первый 14, второй 15 и третий 16 дешифраторы, блок 17 управления, входы 18-20 соответственно первого, второго и третьего аргументов, входы 21-23 пер- iBoro, второг о и третьего углов, группу тактовых входов 24, выходы 25-27 преобразо- вапных первого, второго и третьего аргу- мептов, выход 28 призпака окончания пово- )ота, второй и третий выходы 29 блока управления, первую группу выходов 30 блока управления.
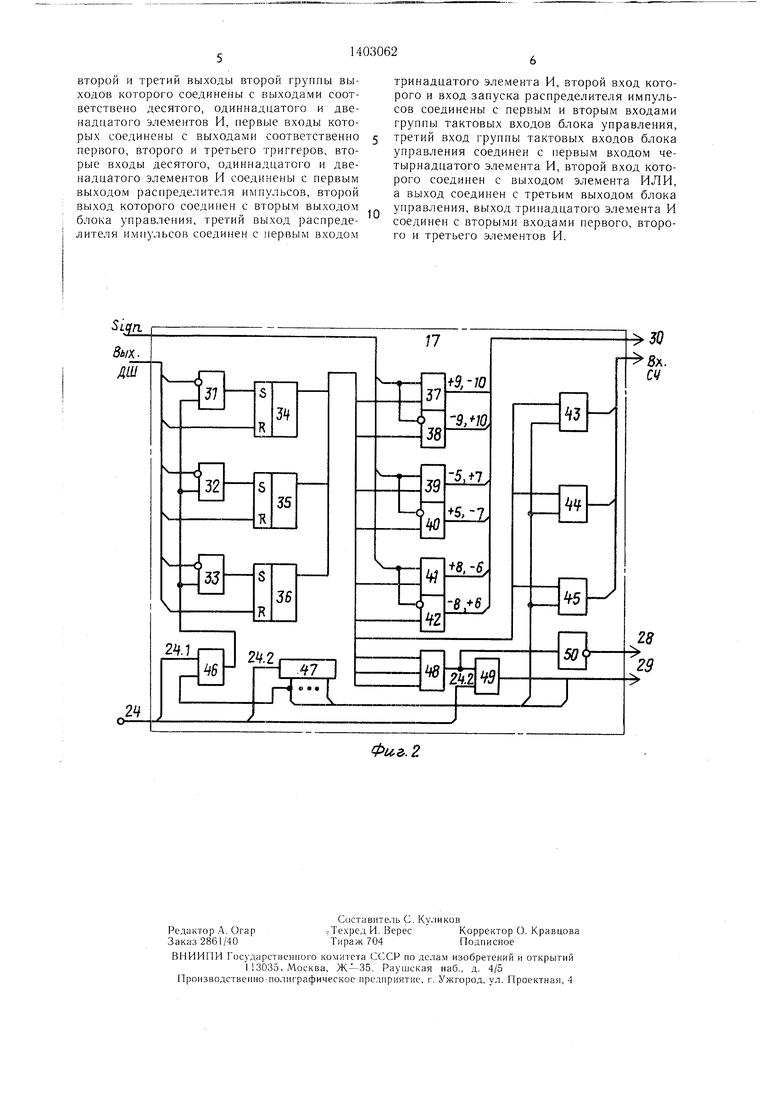
Блок управления образуют первый 31, второй 32 и третий 33 элементы И, первый 34, второй 35 и третий 36 триггеры, с четвертого по тринадцатый элементы И 37-46, распределитель 47 импульсов, элемент ИЛИ 48, четырпадцатьш элемент И 49 и элемент НЕ 50.
Устройство работает следующим образом.
Алгоритм преобразования координат имеет вид
Х,+ ,;(,+ ЛеУ,,2-У,-+, У,-.еХ,2- +Ау -2Z,+ , + AeX,.,21|; .+1 Н - 2 ;
е,.,
1 Л та.1-{-ф, в, 8}-Л:
(-),+1(-),
, 1, 2, ..., Л/2 /г/2
, 0 Ks
I sign) при АЧ -
(1)
|)., e()e;
-Ч -1
О при х|з,0
Л f signB при 10 при е,0; а -Г ё при е,
10 при е,0 где Х, УК , Z
вектора на оси системы коордипроекцииисходной нат;
п - разрядность мантисс координат X, У, Z.
Перед пачало.м вычислений в регистры 2-4 заносятся проекции вектора Xf,, У , Z- на оси исходной системы координат, а в счетчики 11 -13 - углы ф, е, в, на которые разворачивается исходная система координат. По сигналу «Работа, поступающему по одному из входов группы тактовых входов 24, в б;1оке 17 управления вырабатываются сигналы управления сумматорами- вычитателями 5-10 и синхросерии сдвига
5
5
информации в регистрах 2-4 и в блоке 1 поворота вектора на каждой итерации вычисляются координаты Xi+, У,+ |, Z,i, получающиеся в результате одновременного по- ворота системы координат на углы , и в соответствии с алгоритмом (1). На сумматорах-вычитателях 5-7 вычисляют соответственно величины - XeZ,2 ; 02 У/- f Xi-2 ; Ьз , а на сумматорах-вычитате0 лях 8-10 соответственно получают координаты
, + ч +Ч У 52+Лч.Х Х2, Z,+ i S;i-лч У,, перезаписываемые в регистры 2-4 соответственно. Сдвинутые значения координат , , Z,2 получают непосредственно с вторьЕХ выходов регистров 2-4. В конце каждой итерации из счетчиков 11 -13 по счетным входам вычитается квант угла , и процесс вычислений повторяется при новом значе0 НИИ (.
При полной отработке какого-либо угла срабатывает соответствующий дешифратор, по сигналу которого блок 17 унравления отключает сигналы управления соответст- вуюп1ими сумматорами-вычитателями, и отключается счетный вход соответствующего счетчика. После этого вращение выполняется только по углам, не равным нулю. При полной отработке всех углов все операторы направления вращения становятся нулевыми и вычисления в соответствии с алгоритмо.м (1) фекращаются. На выходе 28 блока 17 управления выставляется сигнал окончания поворота и по выходу 29 прекращается выдача серий сдвига информации в регистрах 2-4. Проекции вектора в развернутой системе координат сни.маются с выходов 25-27 устройства.
Блок управления функционирует следующим образом. По входу 24 в блок управления поступает непрерывная синхросерия 24.2, по которой в распределителе 47 импульсов вырабатываются импульсы с периодами, равны.ми длительности итерации, а также сигнал «Работа 24.1, по которому в первом такте итерации на элементе И 46 вырабатывается импульс запуска устройства. По этому импульсу при нулевых выходных сигналах дешифраторов элементы И 31-33 устанавливают триггеры 34-36 в единичное состояние. На элементах И 37-42 вырабатываются сигналы управления сумматорами0 вычитателями 5-10. Знаками «-|- и «- обозначены режимы работы сумматора- вычитателя, а число соответствует его позиции по фиг. 1. На элементах И 43-45 в последнем такте каждой итерации вырабатываются импульсы 2, подаваемые на
5 счетные входы счетчиков 11 -13. После отработки какого-либо угла В по сигналу с соответствующего дешифратора по входу «Вых. ДШ соответствующий триггер (34-36)
0
5
0
5
ycTaHaBvinBaercH в нулевое состояние, на элементах И 37-42 прекращается выработка сигналов управления, а на элементах И 43-45 прекращается выработка соответствующих счетных импульсов. Элемент ИЛИ 48 открывается единичными выходами триггеров 34-36 и разрещает выдачу через элемент И 49 по входу 24.2 сдвиговой серии на регистры 2-4. По выходу 29 с распределителя 47 в блок 1 поворота вектора выдаются импульсы, необходимые для синхронизации его работы. После отработки всех углов триггеры 34-36 устанавливаются Б нулевое состояние, элементы ИЛИ 48 и И 49 закрываются и отключают сдвиг информации в регистрах блока поворота. Инвертированный на элементе НЕ 50 выход элемента ИЛИ 48 является сигналом признака окончания поворота вектора.
Формула изобретения
1. Устройство для преобразования координат вектора в трехмерном пространстве, содержа идее блок поворота вектора, первый счетчик, первый дешифратор и блок управления, причем блок поворота вектора содержит три регистра и шесть сумматоров-вычи- тателей, причем входы первого, второго и третьего аргументов устройства соединены с первыми информационными входами соответственно первого, второго и третьего регистров, выходы первого, второго и третьего регистров соединены с входами первых операндов соответственно первого, второго и третьего сумматоров-вычитателей, выходы которых соединены с входами первых операндов соответственно четвертого, пятого, шестого сумматоров-вычитателей, выходы которых соединены с вторыми информационными входами соответственно первого, второго и третьего регистров, первый выход первой группы выходов блока управления соединен с входом выбора кода операции пятого и шестого сумматоров-вычитателей, второй выход первой группы выходов блока управления соединен с входом выбора кода операции первого и третьего сумматоров- вычитателей, третий выход первой группы выходов блока управления соединен с входом выбора кода операции второго и четвертого сумматора-вычитателей, первый вы- ход блока управления является выходом признака окончания поворота устройства, второй и третий выходы блока управления соединены соответственно с синхронизирующими входами и входами сдвига первого, второго и третьего регистров, группа-тактовых входов устройства соединена с одноименной группой входов блока управления, выходы четвертого, пятого и щестого сумма- торов-вычитатеЛей являются выходами преобразованных первого, второго и третьего аргументов устройства соответственно, от- личающееся тем, что, с целью расширения
класса реншемых задач за счет возможности поворота вектора в трехмерном пространстве, в него дополнительно введены два, счетчика и два дешифратора, приче.м выход первого регистра соединен со сдвигом на Д разрядов в сторону младших разрядов (Л - итерационная константа) с входами вторых операндов второго и третьего сум.маторов- вычитателей, выход второго регистра соединен со сдвигом на К. разрядов в сторону младших разрядов с входами вторых операндов четвертого и шестого сумматоров- вычитателей, выход третьего регистра соединен со сдвигом на К разрядов в сторону младших разрядов с входами вторых операндов первого и пятого сумматоров-вычи,- тателей, входы первого, второго и третьего углов устройства соединены с входами записи соответственно первого, второго и третьего счетчиков, выходы которых соединены с входами соответственно первого, второго и третьего дешифраторов, выходы которых соединены с группой входов признаков нулевого угла блока управления, выходы стар- иих разрядов первого, второго и третьего счетчиков соединены с группой входов ана5 лиза знаков блока управления, первый, второй и третий выходы второй группы выходов блока управления соединены со счетными входами соответственно первого, второго и третьего счетчиков.
2. Устройство по п. 1, отличающееся тем,
0 что блок управления содержит распределитель импульсов, три триггера, четырнадцать элементов И, элемент ИЛИ и элемент НЕ, причем первый, второй и третий входы группы входов признаков нулевого угла блока управления соединены с первыми инверсны5 ми входами соответственно первого, второго и третьего элементов И и с входами сброса соответственно первого, второго и третьего триггеров, первый вход группы входов анализа знаков соединен с первым прямым вхо0 дом четвертого и первым инверсным входом пятого элементов И, второй вход группы входов анализа знаков соединен с первым прямы.м входом шестого и первым инверсным входом седьмого элементов И, третий вход группы входов анализа знаков соединен
5 с первы.м прямым входом восьмого и первым инверсны.м входом девятого элементов И, вторые входы четвертого и пятого элементов И соединены с выходом первого триггера, вторые входы шестого и седьмого элементов И соединены с выходом второго триггера,
0 вторые входы восьмого и девятого элементов И соединены с выходом третьего триггера, входы установки первого, второго и третьего триггеров соединены с выходами первого, второго и третьего элементов И, выходы
С первого, второго и третьего триггеров соединены соответственно с первым, вторым и третьим входами элемента ИЛИ, выход которого через элемент НЕ соединен с первым выходом блока управления, первый.
второй и третий выходы второй группы выходов которого соединены с выходами соот- ветствено десятого, одиннадцатого и двенадцатого элементов И, первые входы которых соединены с выходами соответственно первого, второго и третьего триггеров, вторые входы десятого, одиннадцатого и двенадцатого элементов И соединены с первым выходом распределителя импульсов, второй выход которого соедипен с вторым выходом блока управления, третий выход распределителя импульсов соединен с первым входом
тринадцатого элемента И, второй вход которого и вход запуска распределителя импульсов соединены с первым и вторым входами группы тактовых входов блока управления, третий вход группы тактовых входов блока управления соединен с первым входом четырнадцатого элемента И, второй вход которого соединен с выходом элемента ИЛИ, а выход соединен с третьим выходом блока управления, выход тринадцатого элемента И соединен с вторыми входами первого, второго и третьего элементов И.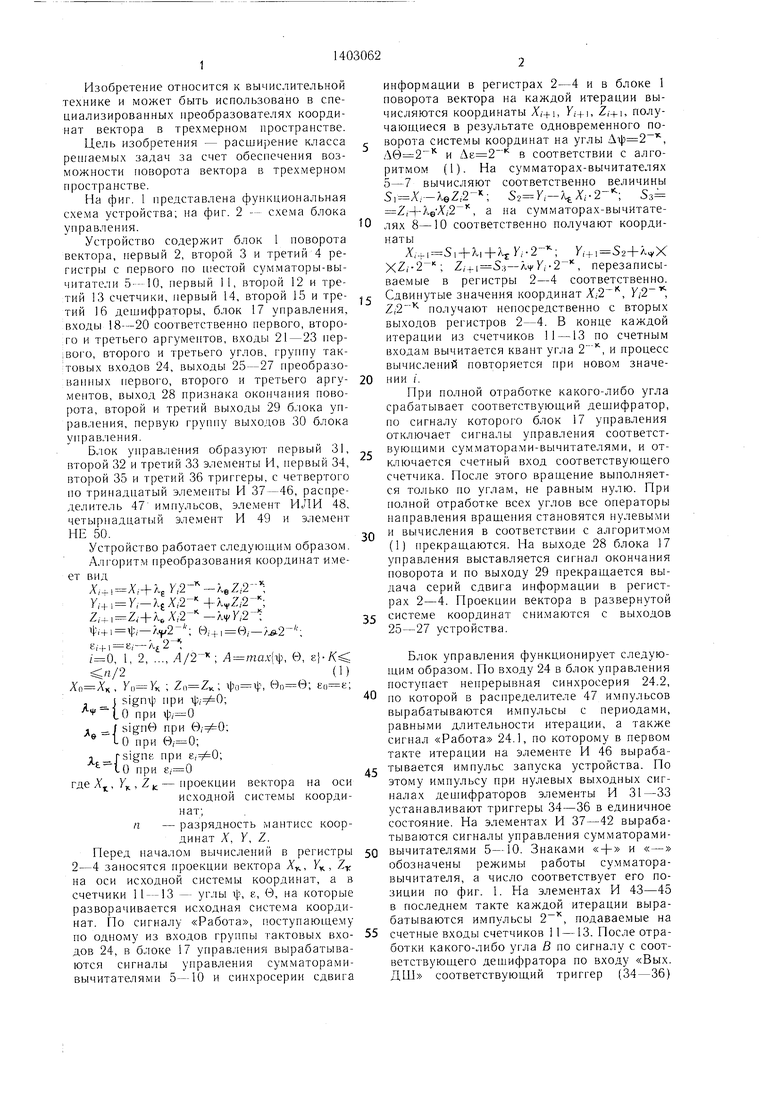
| название | год | авторы | номер документа |
|---|---|---|---|
| Вычислительное устройство | 1986 |
|
SU1361546A1 |
| Устройство для преобразования координат | 1989 |
|
SU1695294A1 |
| Функциональный преобразователь | 1983 |
|
SU1136154A1 |
| Вычислительное устройство | 1983 |
|
SU1167604A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ КООРДИНАТ | 1991 |
|
RU2007749C1 |
| Устройство преобразования координат | 1987 |
|
SU1472902A1 |
| Функциональный преобразователь | 1986 |
|
SU1456951A1 |
| Устройство для преобразования координат | 1987 |
|
SU1460720A2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МОДУЛЯ ТРЕХМЕРНОГО ВЕКТОРА | 1993 |
|
RU2040039C1 |
| Вычислительное устройство | 1983 |
|
SU1164696A1 |
Изобретение относится к области вычислительной техники и может быть исполь- .зовано при построении специализированных процессоров для решения задач стабилизации. Целью изобретения является расширение класса решаемых задач за счет возможности поворота вектора в трехмерном пространстве. Устройство содержит блок 1 поворота вектора, регистры 2-4, сумматоры- вычитатели 5-10, счетчики 11 - 13, дешифраторы 14-16, блок 17 управления. В устройство введены три счетчика и три дешифратора, обеспечивающие слежение за отработкой углов. В блоке поворота вектора все три координаты обрабатываются одновременно с шаго.м 2 (К - итерационная константа). Условие, при котором (л - разрядность мантисс координат), позволяет исключить влияние некоммутативности матриц вращения на порядок отсчета углов. В результате обеспечивается задание всех углов поворота от осей исходной системы координат, например от гиростабили- зированной платфор.мы, что весьма важно при рещении задач стабилизации различных судовых систем на качке. 1 з. п. ф-лы, 2 ил. (О (Л с 4: о со о 05 ГС F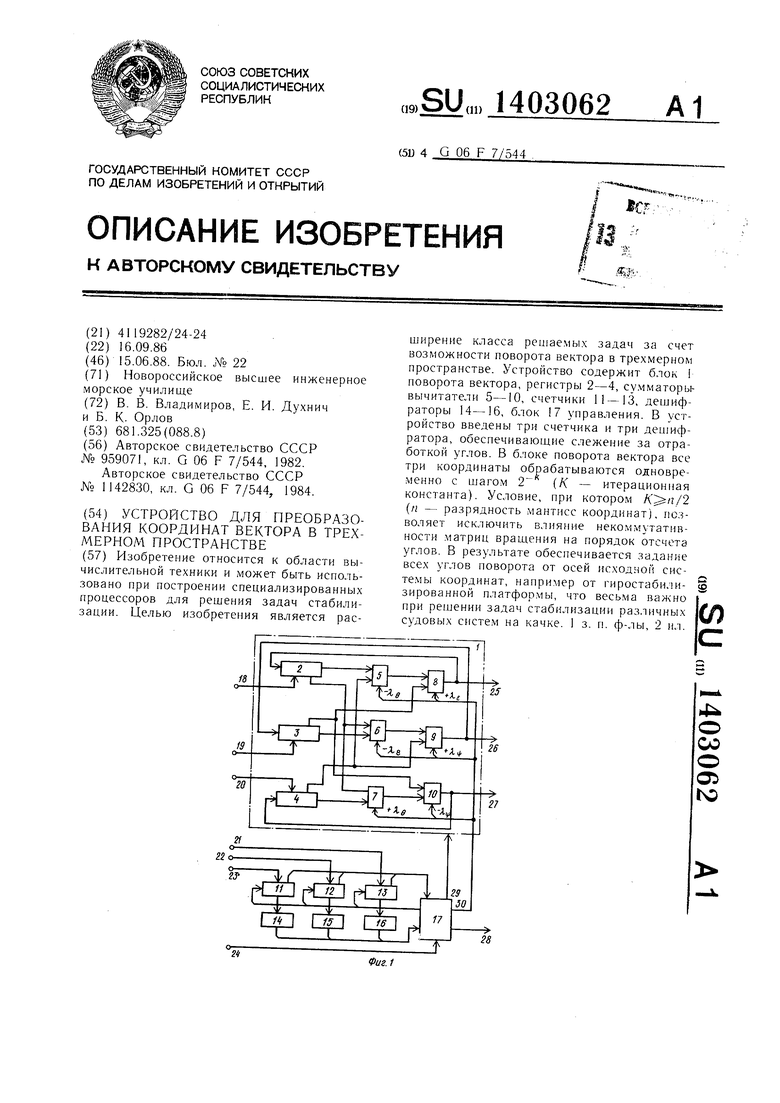
Фиг. 2
| Вычислительное устройство | 1981 |
|
SU959071A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для определения модуля трехмерного вектора | 1983 |
|
SU1142830A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
