Изобретение относится к технике автоматического регулирования и управления и может быть использованодля стабилизации статических параметров существенно нестационарных объектов, входящих в многоконтурную систему автоматического управления, имеющую один или несколько замкнутых контуров подчиненного регулирования.
Цель изобретения - расширение области применения устройства.
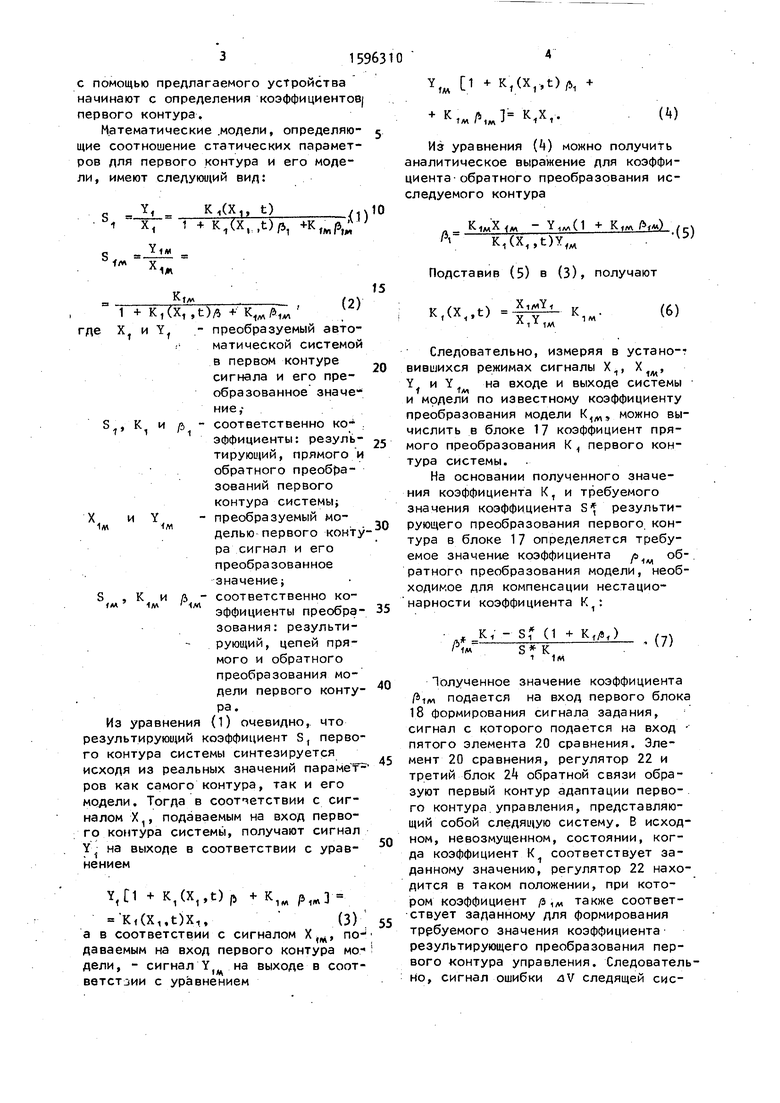
На чертеже представлена схема устройства.
Устройство состоит из первого четвертого элементов 1 - 4 сравнения системы, первого и второго объектов 5 и 6 управления, первого и второго блоков 7 и 8 обратных связей, первого - четвертого элементов 9 12 сравнения модели, модели 13 первого
объекта управления, -модели 14 второго объекта управления модели, первого и второго блоков 15 и 16 блоков обратных связей, блока 17 решения системы алгебраических уравнений, первого и второго блоков 18 и 19 формирования сигналов задания, пятого и шестого элементов 20 и 21 сравнения первого и второго контуров адаптации, первого и второго 22 и 23 регуляторов, третьего и четвертого блоков 2 и 25 обратных связей первого и второго контуров адаптации.
Первый объект 5 управления и первый блок 7 обратной связи образуют первый контур регулирования, вторЬй объект 6 управления и блок 8 - второй контур регулирования. Адаптивная настройка статических параметров многосвязной автоматической системы
с помощью предлагаемого устройства начинают с опрелеления коэффициентов первого контура.
Математические .модели, определяющие соотношение статических параметров для первого контура и его модели, имеют следующий вид: 1 + к,Сх, ,t) + к./а преобразуемый авто где X, и Y матической системо в первом контуре сигнала и его преобразованное значе ние,соответственно коэффициенты: резуль тирующий, прямого обратного преоб{)азований первого контура системы - преобразуемый моделью первого конт ра сигнал и его преобра зованное значение; соответственно коэффициенты преобра зования: результирующий, цепей прямого и обратного преобразования модели первого конту ра. Из уравнения (1) очевидно, что результирующий коэффициент S, перво го контура системы синтезируется исходя из реальных значений парамеТ ров как самого контура, так и его модели. Тогда в соответствии с сигналом Х, подаваемым на вход первого контура системь, получают сигнал Y на выходе в соответствии с уравнениемYji + K,(x,,t), р,,3 K(x,,t)x,. (3) а в соответствии с сигналом X,.., по даваемым на вход первого контура мо дели, - сигнал Y, на выходе в соот ветствии с уравнением
г« 1 Kt(X,,t)A, -ь
(М
,м уравнения (i) можно пoлyчиtь аналитическое выражение для коэффициента-обратного преобразования исследуемого контура
л - 1мХ м У-|лл(1 + Л«м) /..ч K,(X,,t)Y,) Подставив (5) в (З), получают K,(X,t) Следовательно, измеряя в устано- вившихся режимах сигналы Х, X , Y и Y на входе и выходе системы и модели по известному коэффициенту преобразования модели К, можно вычислить в блоке 17 коэффициент прямого преобразования К первого контура системы. На основании полученного значения коэффициента К, и требуемого значения коэффициента S результирующего преобразования первого, контура в блоке 17 определяется требуемое значение коэффициента ратного преобразования модели, необходимое для компенсации нестационарности коэффициента К : к, - Sf (1 + K,/s,) Полученное значение коэффициента ftiM подается на вход первого блока 18 формирования сигнала задания, сигнал с которого подается на вход пятого элемента .0 сравнения. Элемент 20 сравнения, регулятор 22 и третий блок 2k обратной связи образуют первый контур адаптации первого контура.управления, представляющий собой следящую систему. В исходном, невозмущенном, состоянии, когда коэффициент К соответствует заданному значению, регулятор 22 находится в таком положении, при котором коэффициент /э ,, также соответствует заданному для формирования требуемого значения коэффициента результирующего преобразования первого контура управления. Следовательно, сигнал ошибки лЧ следящей сиетемы равен нулю и система находится в равновесии. При возникновении отклонения коэффициента К от требуемого получаемого на основании уравнения (6). блок 17 формирует новое значение параметра д. на основании которого формируется новое значение сигнала задания. Сигнал рассогласова ния V, устраняется следящей системой, которая устанавливает регулятор 22 в новое, установившееся, значение. Таким образом, в процессе функционирования первого контура управле ния системы в результате выполнения алгоритмов (6) и (7) в блоке 17 и наличия контура адаптации осуществляется компенсация параметрических возмущений коэффициента S первого объекта за счет непрерывной настройки коэффициента л модели. При этом в случае использования астатической следящей системы ошибка по положению отсутствует, что обеспечивает точную стабилизацию результирующего коэффициента первого контура управления. Далее определяется коэффициент прямого преобразования второго контура. Для этого контура первый контур с результирующим коэффициентом преобразования S, выполняет функцию контура подчиненного регулирования. Тогда математическая модел исследуемой системы имеет вид S,Kt(X2,t) S Ь. X, HS,K,(X,,t)/b,+S,K,p,; где Х и Y - преобразуемая величина и ее преобразованное значение для второго контура системы; S ,К и ,j - соответственно коэффициенты преобразования: результирующий, цепей прямого и обратного преобразования второго контура. Соответствуюсцая модель имеет вид S длК tM l Х HS,K,(X,,t)/i,-HS,K,,/5 где X и Y,j - преобразуемая величина и ее преобразованное значение модели второго контура; S ,К , /ь« - соответственно коэф- 2 2 лл t м фициенты преобразования: результирующий, цепей прямого и обрат ного преобразования модели йторого контура. В соответствии с сигналом Xj получают сигнал Y на выходе второго контура системы в соответствии . с уравнением Y,1 + S,K,(X,t)/i, + 5, - S,K(X,,t)X,,(10) и сигнал Y на выходе модели 1 + S,K(X,,t)/3, + .M S,K,X,. Из уравнения (11) также можно получить аналитическое выражение для коэффициента обратного преобразования . S V:Yj ilU±il iKaA5 i M7l /i - 57к7Гх7::Е);:Г, Подставив (12) в (10). получают - 1 Ki(X,t) Поэтому, измеряя значения Y и Y , по известному значению S и требуемому значению S можно вычислить в блоке 17 соответствующие коэффициенты К и fli S,K(X,t),K(X.,.t))5i 7 Полученное значение подается на второй блок 19 формирования сигнала задания, сигнал с выхода которого подается на шестой элемент 21 сравнения. Элемент 21 сравнения, регулятор 23 и четвертый блок 25 обратной связи образуют второй адаптивный контур, также представляющий собой позиционную следящую систему, функциональную аналогично первому адаптивному контуру. Формула изобретения, Устройство адаптивной настройки статических параметров многосвязмои автоматической системы, содержащее последовательно соединенные первый, второй, третий и четвертый элементы сравнения системы, первый и второй объекты управления, а также первый и второй блоки обратной связи модели первого и второго блоков обратной связи, последовательно соединенные первый, второй, третий и четвертый элементы сравнения модели, модели первого и второго объектов управления, причем выход первого объекта управления соединен с входом первого блоки обратной связи, выход второго объекта управления соединен с входом второго блока обратной связи, выход модели первого объекта управления подключен к первому входу модели первого блока обратной связи, выход модели второго объекта управления соединен с первым входом модели второго блока обратной связи, выход первого блока обратной связи системы соединен с вторыми входами четвертого элемента сравнения системы и третьего элемента сравнения модели, выход второго блока обратной связи системы соединен с вторым входом второго элемента сравнения системы и первым входом первого элемента сравнения модели, выход первого блока модели обратной связи соединен с вторыми входами четвертого элемента ера внения модели и третьего элемента сравнения системы, выход модели второго блока обратной связи соединен с вторым входом второго элемента сравения модели и первым входом первого лемента сравнения системы, вторые входы первых элементов сравнения cиcteмы и модели соединены с входом устройства, а выходы третьих элементов сравнения системы и модели, первого и-второго объектов управления и моделей первого и второго объектов управления соединены соответственно с первого по шестой входами блока решения системы алгебраических.уравнений, отличающееся тем, что, с целью расширения области применения устройства, в него введены первый и второй блоки формирования сигнала задания, третий и четвертый блоки обратной связи, пятый и шестой элементы сравнения, первый и второй регуляторы, причем входы первого и второго блоков формирования сигналов задания соединены соответственно с первым и вторым выходами блока решения системы алгебраических уравнений, а их выходы - с первыми входами пятого и шестого элементов сравнения, выходы которых соединены с входами первого и второго регуляторов, выход первого регулятора соединен с вторым входом модели первого блока обратной связи и через третий блок обратной связи - с вторым входом пятого элемента сравнения, выход второго регулятора соединен с вторым входом Модели второго блока обратной связи и через четвертый блок обратной связи с,вторым входом шестого элемента сравнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для идентификации статических параметров многосвязной автоматической системы | 1986 |
|
SU1474596A1 |
| Система управления | 1991 |
|
SU1792539A3 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| Самонастраивающаяся система комбинированного регулирования | 1985 |
|
SU1254433A1 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ПО ПИД-ЗАКОНУ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2510956C2 |
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| СИСТЕМА ИДЕНТИФИКАЦИИ ОБЪЕКТОВ УПРАВЛЕНИЯ | 2012 |
|
RU2486563C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ УПРАВЛЕНИЯ С ИХ ИДЕНТИФИКАЦИЕЙ | 2015 |
|
RU2583746C1 |
| СПОСОБ САМОНАСТРОЙКИ СИСТЕМЫ УПРАВЛЕНИЯ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2304298C2 |
| АДАПТИВНАЯ СИСТЕМА ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ | 2012 |
|
RU2500009C1 |

Устройство адаптивной настройки параметров многосвязной автоматической системы относится к технике автоматического регулирования и управления и может быть использовано для стабилизации статических параметров существенно нестационарных объектов. Цель изобретения - расширение области применения устройства. Поставленная цель достигается введением в устройство контуров адаптации объектов, составляющих многосвязную систему автоматического управления, позволяющих путем изменения параметров блоков обратных преобразований осуществлять настройку результирующих коэффициентов преобразования объектов, входящих в замкнутый контур управления. 1 ил.
| Electronic, Design, 197А, v | |||
| Зг^, № 22, p | |||
| Аппарат для передачи фотографических изображений на расстояние | 1920 |
|
SU170A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
