I
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах измере
ния угловых и линейных перемещений в реальном масштабе времени, гпе использование известных измерительных
устройств невозможно, например в рентгеновских вычислительных томографах третьего и четвертого поколений.
Цель изобретения .- повышение, ин- формативное™ при сохранении числа меток положения путем разбиения интервала между соседними метками положения на К равных интервалов за счет формирования К-1 позиционных импуль- сов.
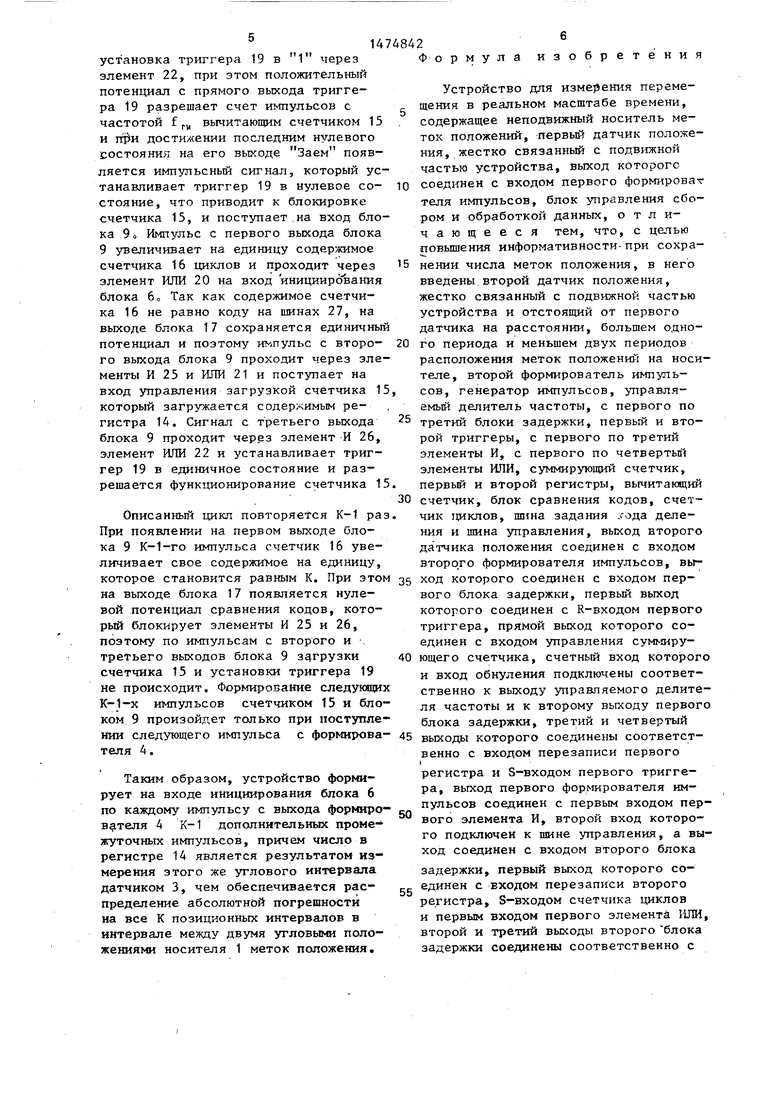
На чертеже показана структурная схема устройства.
Устройство содержит неподвижный носитель 1 меток положения, датчики 2 и 3 положения, формирователи 4 и 5 импульсов, блок 6 управления сбором и обработкой данных, с первого по третий блоки 7-9 задержки, генератор
10импульсов, управляемый делитель
11частоты, суммирующий счетчик 12, первый 13 и второй 14 регистры, вычитающий счетчик 15, счетчик 16 циклов, блок 17 сравнения кодов, первый
18 и второй 19 триггеры, с первого по четвертый элементы ИЛИ 20-23, с первого по третий элементы И 24-26, шину 27 задания кодов и шину 28 управления .
Устройство работает следующим об- разом.
В исходном состоянии триггеры 18 и 19 находятся в нулевых состояниях (цени первоначальной установки триггеров 18 и 19 не показаны) и нулевые потенциалы с прямых выходов триггеров 18 и 19 блокируют соответственно счетчики 12 и 15.
На шинах 27 задан код числа К, а на вине 28 присутствует поле-житель ный потенциал, который подтверждает нулевое состояние триггера 19 элемент ИЛИ 23 и блокирует прохождение сигналов с выхода формирователя 4 иа вход блока 8 через элемент И 24 Генератор 10 вырабатывает импульсы с кварцованной частотой, которая поступает на вход делителя 11, на выходе которого появляются импульсы с частотой f/K, которые поступают на тактовый вход счетчика 12, которы подсчитывает эти импульсы,
После начала вращения сканирующей системы датчики 2 и 3 вырабатывают электрические сигналы при проходде-г нии соответствующих меток неподвижного носителя 1 меток положения, ти сигналы формируются соответственно на формирователях 4 и 5.
Q
5
0
5
Q
Q §
5
При появлении сигнала на выходе формирователя 5, на первом - четвертом выходах блока 7 появляются сдвинутые во времени импульсы По импульсу с первого выхода блока 7 устанавливается в О триггер 18, нулевой сигнал с прямого выхода которого запрещает функционирование счетчика 12. По сигналу с второго выхода блока 7 содержимое счетчика 12, которое соответствует количеству импульсов с частотой f/K, поступивших в интервале времени между предыдущим и данным сигналами с выхода формирователя 5, переписывается в регистр 13, По сигналу с третьего выхдда блока 7 счетчик 12 обнуляется и по сигналу с четвертого выхода блока 7 триггер 18 устанавливается в 1, тем самым разрешается подсчет импульсов с частотой f/K счетчиком 12, который продолжает подсчет до прихода следующего импульса с выхода формирователя 5 и . На вход инициирования блока 6 при этом никаких импульсов не поступает „
При достижении сканирующей системой штатной скорости вращения на шине 28 появляется нулевой потенциал, который разрешает поступление импульсов с выхода формирователя 4 на вход блока 8 через элемент И 24.
При поступлении каждого импульса на вход блока 8 сначала появляется сигнал на его первом выходе, по которому происходит загрузка регистра 14 содержимым регистра 13, устанавливается счетчик 16 циклов в исходное состояние Ю„..0 (при этом на выходе блока 17 сравнения кодов появляется единичный потенциал, который разрешает прохождение сигналов через элементы И 25 и 26). Импульс с первого выхода блока 8 проходит через элемент ИЛИ 20 и поступает на вход инициирования блока 6, который управляет сбором и обработкой данных с детекторов рентгеновского излучения томографа, жестко связанных с неподвижным носителем 1 меток положения (детекторы рентгеновского излучения и источник рентгеновского излучения не показаны). По импульсу с второго выхода блока 8 происходит загрузка вычитающего счетчика 15 содержимым регистра 14. По импульсу с третьего выхода блока 8 происходит
установка триггера 19 в 1 через элемент 22, при этом положительный потенциал с прямого выхода триггера 19 разрешает счет импульсов с частотой fгм вычитающим счетчиком 15 и пЈи достижении последним нулевого состояния на его выходе Заем появляется импульсный сигнал, который устанавливает триггер 19 в нулевое состояние, что приводит к блокировке счетчика 15, и поступает на вход блока 9 о Импульс с первого выхода блока 9 увеличивает на единицу содержимое счетчика 16 циклов и проходит через элемент ИЛИ 20 на вход инициирования блока 6с Так как содержимое счетчика 16 не равно коду на шинах 27, на выходе блока 17 сохраняется единичный потенциал и поэтому импульс с второго выхода блока 9 проходит через элементы И 25 и ИЛИ 21 и поступает на вход управления загрузкой счетчика 15 который загружается содержимым регистра 14. Сигнал с третьего выхода блока 9 проходит через элемент И 26, элемент ИЛИ 22 и устанавливает триггер 19 в единичное состояние и разрешается функционирование счетчика 15
147
Описанный цикл повторяется К-1 раз При появлении на первом выходе блоха 9 К-1-го импульса счетчик 16 увеличивает свое содержимое на единицу, которое становится равным К. При этом на выходе блока 17 появляется нулевой потенциал сравнения кодов, который блокирует элементы И 25 и 26, поэтому по импульсам с второго и третьего выходов блока 9 загрузки счетчика 15 и установки триггера 19 не происходит. Формирование следующих К-1-х импульсов счетчиком 15 и блоком 9 произойдет только при поступлении следующего импульса с формнрова- теля 4.
Таким образом, устройство формирует на входе инициирования блока 6 по каждому импульсу с выхода формиро- вателя 4 К-1 дополнительных промежуточных импульсов, причем число в регистре 14 является результатом измерения этого же углового интервала датчиком 3, чем обеспечивается рас- пределение абсолютной погрешности на все К позиционных интервалов в интервале между двумя угловыми положениями носителя 1 меток положения.
842 Ф
о р м у л а
изобретения
0
5
0
5
0
5 5
/, 5
Устройство для измерения перемещения в реальном масштабе времени, содержащее неподвижный носитель меток положений, первый датчик положения, жестко связанный с подвижной частью устройства, выход которого соединен с входом первого формировав теля импульсов, блок управления сбором и обработкой данных, о т л и- чающееся тем, что, с целью повышения информативности-при сохранении числа меток положения, в него введены второй датчик положения, жестко связанный с подвижной частью устройства и отстоящий от первого датчика на расстоянии, большем одного периода и меньшем двух периодов расположения меток положений на носителе, второй формирователь импульсов, генератор импульсов, управляемый делитель частоты, с первого по третий блоки задержки, первый и второй триггеры, с первого по третий элементы И, с первого по четвертый элементы ИЛИ, суммирующий счетчик, первый и второй регистры, вычитающий счетчик, блок сравнения кодов, счетчик циклов, шина задания /ода деления и шина управления, выход второго датчика положения соединен с входом второго формирователя импульсов, выход которого соединен с входом первого блока задержки, первый выход которого соединен с R-входом первого триггера, прямой выход которого соединен с входом управления суммиру- 0 ющего счетчика, счетный вход которого и вход обнуления подключены соответственно к выходу управляемого делителя частоты и к второму выходу первого блока задержки, третий и четвертый выходы которого соединены соответственно с входом перезаписи первого
регистра и S-входом первого триггера, выход первого формирователя импульсов соединен с первым входом первого элемента И, второй вход которого подключен к шине управления, а выход соединен с входом второго блока
задержки, первый выход которого соединен с входом перезаписи второго регистра, S-входом счетчика циклов и первым входом первого элемента ИЛИ, второй и третий выходы второго блока задержки соединены соответственно с
первыми входами второго и третьего элементов ИЛИ, выходы разрядов суммирующего счетчика соединены с разрядными входами первого регистра, ц выходы которого соединены с разрядными входами второго регистра, выходы которого соединены с разрядными в хо- дами вычитающего счетчика, выход переполнения которого соединен с пер- Q вым входом четвертого элемента ИЛИ и входом третьего блока задержки, первый выход которого соединен с вторым входом первого элемента ИЛИ и с С-входом счетчика циклов, второй 15 и третий выходы третьего блока задержки соединены соответственно с первы- ми входами второго и третьего элементов И, вторые входы которых объединены и подключены к выходу блока срав- 20 нения кодов, выход второго элемента И соединен с вторым входом второго элемента ИЛИ, выход которого соединен с входом перезаписи вычитающего счетчика, выход третьего элемента И соединен с вторым входом третьего элемента ИЛИ, выход которого соединен с S-входом второго триггера, второй вход четвертого элемента ИЛИ подключен к шине управления, а выход - к R-входу второго триггера, прямой выход которого соединен с входом управления вычитающего счетчика, счетный вход которого подключен к выходу генератора импульсов и к входу управляемого делителя частоты, разрядные входы которого подключены к шине задания кода деления и к первой группе входов блока сравнения кодов, вторая группа входов которого подключена к выходам счетчика циклов, выход первого элемента ИЛИ соединен с входом блока управления сбором и обработки данныхо

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формирования корректирующих сигналов кинематических погрешностей | 1984 |
|
SU1224792A1 |
| Устройство для измерения угла поворота коленчатого вала двигателя внутреннего сгорания | 1985 |
|
SU1334056A1 |
| Устройство для измерения мощности | 1990 |
|
SU1751685A1 |
| Устройство для измерения параметров внутрицилиндрового давления двигателей внутреннего сгорания | 1980 |
|
SU934261A1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ МЕСТНОСТИ | 1988 |
|
SU1841035A1 |
| Умножитель частоты следования импульсов | 1985 |
|
SU1290313A1 |
| Устройство для измерения угла закручивания вращающегося вала | 1991 |
|
SU1795312A1 |
| Цифровой измеритель угловой скорости | 1988 |
|
SU1509741A1 |
| Устройство для тренировки операторов | 1989 |
|
SU1709369A1 |
| Устройство для испытаний датчиков давления | 1983 |
|
SU1129624A1 |

Изобретение относится к области автоматики и вычислительной техники и может быть использовано в системах измерения угловых и линейных перемещений в реальном масштабе времени, где использование известных измерительных устройств невозможно, например в рентгеновских вычислительных томографах третьего и четвертого поколений. Целью изобретения является повышение информативности при сохранении числа меток положения путем разбиения интервала между соседними метками положения на К равных интервалов. Поставленная цель достигается тем, что в устройство, содержащее неподвижный носитель меток положения, первый датчик положения, первый формирователь импульсов и блок сбора и обработки данных, дополнительно введены вторые датчик положения и формирователь импульсов, три блока задержки, два триггера, суммирующий счетчик, два регистра, вычитающий счетчик, счетчик циклов, блок сравнения кодов, четыре элемента ИЛИ, три элемента И, шина задания кода деления и шина управления, генератор импульсов и управляемый делитель частоты. Введение второго датчика положения позволяет с помощью генератора импульсов, управляемого делителя частоты, первого блока задержки, суммирующего счетчика и первого регистра произвести измерение фактического времени перемещения между двумя соседними метками с высокой точностью, которое затем по сигналам с основного датчика положения разбивается на К равных интервалов с помощью вычитающего счетчика, блока сравнения кодов, счетчика циклов и двух блоков задержки, т.е. исходными данными для размножения в данном интервале является измеренная предварительно, с помощью введенного датчика положения, длительность этого же интервала. 1 ил.
Неподвижный носитель меток положения
| Патент США № 4178511, кл | |||
| Катодное реле | 1921 |
|
SU250A1 |
| Патент США № 4075491, кл | |||
| Катодное реле | 1921 |
|
SU250A1 |
