Изобретение относится к гидроавтоматике и может быть использовано в конструкциях промышленных роботов и манипуляторов.
Целью изобретения является повышение точности и улучшение динамических характеристик.
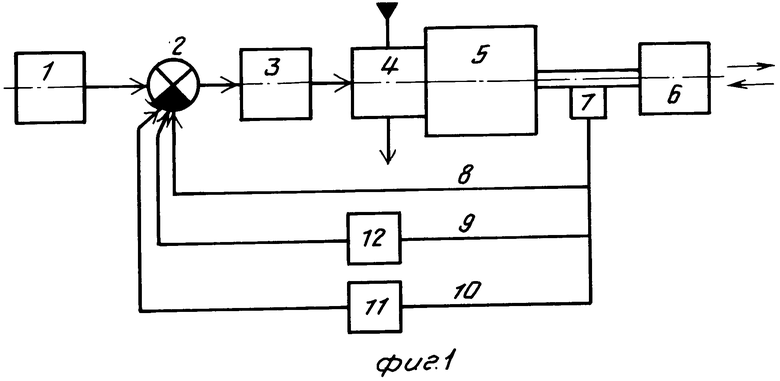
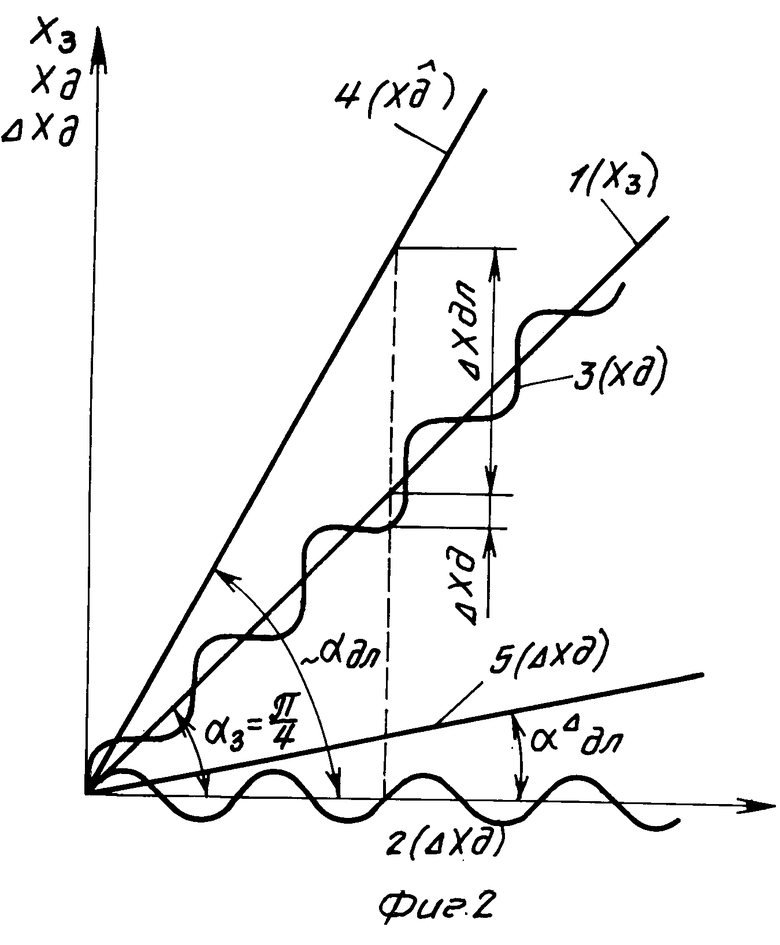
На фиг. 1 изображена схема электрогидравлического следящего привода (ЭГСП); на фиг.2 - градуировочные зависимости датчика положения и привода.
Привод содержит последовательно соединенные задающий блок 1, сумматор 2, электронный усилитель 3, электрогидравлический усилитель 4, гидродвигатель 5, связанный с объектом 6 управления и датчик 7 положения. Канал 10 цепи обратной связи включает интегрирующее звено 11, канал 8 выполнен в виде единичной обратной связи и в канал 9 включен корректирующий блок 12, выполненный с передаточной функцией, противоположной зависимости погрешности датчика 7 от измеряемой величины перемещения.
Усилитель 4 соединен с полостями гидродвигателя 5, источником питания и сливом (не показано).
Суммарная погрешность позиционирования ЭГСП определяется собственной погрешностью датчика 7 положения и статической погрешностью самого ЭГСП. Собственная погрешность датчика 7 положения определяется несоответствием градуировочной характеристики датчика 7 градуировочной характеристике задающего блока 1. Характеристика задающего блока 1 представляет собой вполне однозначное соответствие задающего электрического сигнала Хз (в виде аналогового напряжения или цифрового кода) требуемому значению регулируемой величины (в данном случае - требуемому положению Х подвижного элемента гидродвигателя 5). Эта характеристика задается произвольно и обычно представляет собой линейную функцию с коэффициентом передачи, равным единице Хз≡Х (зависимость 1 на фиг. 2). Датчик 7 положения регистрирует регулируемую величину Х с некоторой погрешностью ΔХэ, зависящей от значения регулируемой величины (зависимость 2 на фиг.2), Поэтому градуировочная характеристика датчика 7 положения X  (Х) не совпадает с характеристикой задающего блока Хз(х), причем градуировочная характеристика датчика 7 может быть как линейной, так и нелинейной (зависимости 4 и 3 на фиг.2). Разница между градуировочными характеристиками датчика 7 и задающего блока 1 равна
(Х) не совпадает с характеристикой задающего блока Хз(х), причем градуировочная характеристика датчика 7 может быть как линейной, так и нелинейной (зависимости 4 и 3 на фиг.2). Разница между градуировочными характеристиками датчика 7 и задающего блока 1 равна
ΔX  (Х) = X
(Х) = X  (Х) - Хз(Х) = X
(Х) - Хз(Х) = X  (Х) - Х (1) и определяет составляющую погрешности привода, обусловленную погрешностью датчика 7.
(Х) - Х (1) и определяет составляющую погрешности привода, обусловленную погрешностью датчика 7.
Градуировочные характеристики задающего блока 1 и датчика 7 положения вводятся в корректирующий блок 12, который представляет собой вычислительную систему, реализующую передаточную функцию, противоположную зависимость погрешности датчика 7 от значения измеряемого положения, т.е. вычисляющую функцию ΔX  (Х).
(Х).
В частности, если ошибка датчика 7 положения является линейной функцией (зависимость 4 на фиг.2)
ΔX∂ = tgα∧Δ∂X , (2) то градуировочная характеристика датчика 7 положения имеет вид
X∂ = x + ΔX∂ = X3 + ΔX∂ =  tg
tg  + tg
+ tg  x (3)
x (3)
(зависимость 4 на фиг.2).
Следовательно, с учетом формул (2) и (3) точное значение регулируемой величины выражается через показания датчика 7 положения Х∂ и его градуировочную характеристик ΔX∂ следующим образом
X = X∂ - Δ X∂ = X∂ - tgα∧Δ∂x = X∂ -  . (4)
. (4)
Таким образом, в данном случае для автоматической компенсации погрешности датчика 7 положения корректирующий блок 12 представляет собой пропорциональный усилитель с коэффициентом усиления
Kу =  . (5)
. (5)
В случае нелинейной градуировочной характеристики датчика 7 положения (зависимости 2 и 3 фиг.2) корректирующий блок 12 может иметь другие более сложные структуры.
Корректирующий блок 12 может быть реализован на элементах аналоговой или цифровой вычислительной техники.
Интегрирующее звено 11 в цепи отрицательной обратной связи (см.фиг.2) обеспечивает астатизм первого порядка. При любом виде передаточной функции привода, охваченного каналами 8 и 9 обратных связей [W(S)], передаточная функция разомкнутого контура ЭГСП, охваченного каналом 10 обратной связи с интегрирующим звеном 11, содержит интегрирующее звено 12, т.е. имеет вид
W′(S) = W(S) ·  .
.
Наличие одного интегрирующего звена в цепи разомкнутого контура ЭГСП обеспечивает ему астатизм первого порядка, т.е. гарантированное отсутствие статической погрешности.
Электрогидравлический следящий привод работает следующим образом.
Перед вводом ЭГСП в эксплуатацию производится точная градуировка датчика 7 положения и задающего блока 1, строятся зависимости Хз(Х), ΔX  (Х) и X
(Х) и X  (Х) [см.фиг.2] по которым формируется структура корректирующего блока 12. В рассмотренном примере конкретного выполнения устройства корректирующий блок 12 представляет собой пропорциональный усилитель с коэффициентом усиления из формулы (5).
(Х) [см.фиг.2] по которым формируется структура корректирующего блока 12. В рассмотренном примере конкретного выполнения устройства корректирующий блок 12 представляет собой пропорциональный усилитель с коэффициентом усиления из формулы (5).
Задающее воздействие, сформированное в задающем блоке 1, проходя через сумматор 2, усиливается в электронном усилителе 3 и подается на вход электрогидравлического усилителя 4, вызывая смещение его регулирующего органа (например, управляющего золотника). При этом гидродвигатель 5 перемещает объект 6 управления. Это перемещение измеряется датчиком 7 положения. Сигнал с последнего положения поступает на входы сумматора 2: на первый вход - непосредственно, на второй и третий входы - соответственно через корректирующий блок 12 и интегрирующее звено 11. Корректирующий блок 12 реализует функциональную зависимость погрешности датчика 7 положения от величины измеряемого положения. Суммирование этой погрешности с непосредственными показаниями датчика 7 положения, передаваемыми в сумматор 2 по каналу 8, обеспечивает автоматическую компенсацию собственной погрешности датчика 7 положения в процессе работы ЭГСП. Подача в сумматор 2 положительного сигнала датчика 7 положения, прошедшего через интегрирующее звено 11, полностью устраняет статическую погрешность ЭГСП за счет превращения его в астатическую систему первого порядка.
При этом на выходе сумматора 2 формируется сигнал рассогласования - разность между задающим воздействием и положением объекта 6 управления. По мере отработки ЭГСП задающего воздействия сигнал рассогласования уменьшается. При нулевом сигнале рассогласования управляющий золотник электрогидравлического усилителя 4 возвращается в нейтральное положение, а объект 6 управления останавливается в заданном положении.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ С ДВУХКАСКАДНЫМ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ УСИЛИТЕЛЕМ МОЩНОСТИ | 2007 |
|
RU2361123C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ С ОДНОКАСКАДНЫМ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ УСИЛИТЕЛЕМ МОЩНОСТИ | 2007 |
|
RU2361122C2 |
| Система адаптивного управления электрогидравлическим следящим приводом с контролем | 2015 |
|
RU2610851C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ | 2009 |
|
RU2430397C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2006 |
|
RU2311568C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Электрогидравлический привод | 1979 |
|
SU857572A1 |
| ЭЛЕКТРОГИДРЛВЯИЧЕСКЛЯ СЛЕДЯЩАЯ СИСТЕМА | 1976 |
|
SU826100A1 |
| Диагностируемый электрогидравлический силовой следящий привод | 1987 |
|
SU1539729A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
Использование: в конструкциях промышленных роботов и манипуляторов. Сущность изобретения: последовательно соединены задающий блок, сумматор, электронный усилитель, электрогидравлический усилитель, подключенный к исполнительному гидромеханизму, его датчик положения и цепь отрицательной обратной связи. Цепь содержит корректирующий блок для компенсации погрешности, вход которого соединен с датчиком положения, выход - с сумматором. Цепь выполнена трехканальной и снабжена интегрирующим звеном, включенным в один из каналов цепи обратной связи, другой канал которой выполнен в виде единичной обратной связи. Корректирующий блок включен в третий канал и выполнен с передаточной функцией, противоположной зависимости погрешности датчика от измеряемой величины перемещения. 2 ил.
ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД, содержащий последовательно соединенные задающий блок, сумматор, электронный усилитель, электрогидравлический усилитель, подключенный к исполнительному гидромеханизму, и датчик положения последнего, а также цепь отрицательной обратной связи, включающую корректирующий блок для компенсации погрешности, вход которого соединен с датчиком положения, а выход - с сумматором, отличающийся тем, что, с целью повышения точности и улучшения динамических характеристик, цепь обратной связи по положению выполнена трехканальной и снабжена интегрирующим звеном, включенным в один из каналов цепи обратной связи, другой канал которой выполнен в виде единичной обратной связи, а корректирующий блок включен в третий канал и выполнен с передаточной функцией, противоположной зависимости погрешности датчика от измеряемой величины перемещения.
| Электрогидравлическая следящая система | 1984 |
|
SU1163054A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
