1
Изобретение относится к обувной отрасли легкой промышленности, а именно к оборудованию для пошива унтов.
Цель изобретения - повышение механизации накладки и крепления ранта по периметру следа унта и повышение производительности труда.
11$. фиг. 1 изображена кинематическая схема машины; на фиг. 2 - схема обкатывания профиля следа относительно упорного ролика; на фиг. 3 - след с прикрепленным рантом.
Машина состоит из станины, привода, двух приводных валов с однообо- ротными муфтами и педальным включением гвоздеподающего механизма, мог; лоткового механизма, устройства для просечки пазов в ранте и устройства для установки унта.
Привод (фиг. 1) содержит электродвигатель 1, ременную передачу 2, контрпривод 3, вторую ременную передачу 4, вал 5, снабженньй шестернями 6 и 7, которые передают движение шестерням 8 и 9 однооборотных муфт, свободно сидящих на валах 10,и 11.
Обе муфты имеют одинаковую конструкцию. Муфта 8 содержит обойму 12, сидящую на шпонке на валу 11. Обойма 12 снабжена подпружиненным ползуном 13, имеющим палец. На этом же валу свободно сидит полумуфта 14, жестко связанная с шестерней 8. Полумуфта имеет отверстия, расположенные по периметру против пальца ползуна 13. Между выступом ползуна 13 и полумуфтой 14 установлен подпружиненный клин 15, связанньй через тягу и рычаг 17 с педалью 18. Соответственно педаль 19 через свою тягу и рычаг служит для управления второй муфтой 9. Вал 10 несет на себе два кулачка 20 и 21 и коническую шестерню 22. Последняя передает движение через блок шестерен 23 шестерне 24, сидящей
тив паза пластины 33 расположена трубка 34, нижний конец которой входит в гвоздевой патрон 35. Кулачок 20 на передней торцовой поверхности имеет накладку 36, взаимодействующую с подпружиненной штангой 37, которая снабжена молотком 38.
Вал 11 заканчивается кривошипом
10 39, которьй через шатун 40 взаимодействует со штангой 41, снабженной блоком пуансонов 42, установленным на колонках на матрице 43, снабженной направляющими для ранта. На станине
15 Установлен регулируемый упорный ролик 44.Кулачок 21 через ролик 45 взаимодействует на вилку, 46, которая через пружину 47 воздействует на штангу 48. Последняя через регулировочный
2о винт 49 и двуплечий рычаг 50 взаимодействует с ползуном 51. Двухрычажная система 52 и 53 снабжена шарнирами 54-56. Втулка 57, в которой помещен шарнир 54, снабжена регулируемой вин25 товой пяточной опорой 58. В направг. , i ляющих втулки 57 установлена с возможностью перемещения в горизонтальной плоскости втулка 59, снабженная регулируемой винтовой носочной опорой
30 60. Втулки 57 и 59 связаны регулировочным винтом 61. Пружина 6 2 служит для компенсации массы устройства для установки унта.
Машина работает следующим образом. При включении привода вращаются электродвигатель 1, контрпривод 3, вал 5, шестерни 6 и 7, а также шестерни 8 и 9 и полумуфты, свободно сидящие на валах 10 и 11.
40 Подлежащий обработке унт одет на штуцер пяточной опоры 58 и опирается носочной частью на носочную опору 60. Опоры предварительно отрегулированы на соответствующий размер.
45 Конец ранта пропущен через направляющие пластины матрицы 43 и уложен
35
в паз ролика 44. Свободный конец ранна валике 25 гвоздеподающего механиз- та смотан в бухту и лежит на полу. ма. На валике 25 сидит карманчиковый Крепление ранта обычно начинают с диск 26. На торце шестерни 24 имеются 50 геленочной части следа. Унт прижимают две накладки, которые взаимодействуют к ролику 44, рант укладывают под пат- с подпружиненным сбрасывателем 27. рон 35 на след унта, после чего кратковременно нажимают на педаль 18, При этом клин 15 с помощью тяги 16 55 и рычага 17 оттягивается, свобождая ползун 13, который под действием своей пружины входит в ближайшее отверстие полумуфты 14, жестко соединив полумуфту 14 с обоймой 12. Последняя
Против диска 26 расположен лоток 28, против которого установлены направляющие 29. Кулачок 20 через ролик 30 взаимодействует с качающимся рычагом 31, который через регулировочный винт 32 контактирует с подвижной ппастиной 33, имеющей косой паз. Про
773712
тив паза пластины 33 расположена трубка 34, нижний конец которой входит в гвоздевой патрон 35. Кулачок 20 на передней торцовой поверхности имеет накладку 36, взаимодействующую с подпружиненной штангой 37, которая снабжена молотком 38.
Вал 11 заканчивается кривошипом
10 39, которьй через шатун 40 взаимодействует со штангой 41, снабженной блоком пуансонов 42, установленным на колонках на матрице 43, снабженной направляющими для ранта. На станине
15 Установлен регулируемый упорный ролик 44.Кулачок 21 через ролик 45 взаимодействует на вилку, 46, которая через пружину 47 воздействует на штангу 48. Последняя через регулировочный
2о винт 49 и двуплечий рычаг 50 взаимодействует с ползуном 51. Двухрычажная система 52 и 53 снабжена шарнирами 54-56. Втулка 57, в которой помещен шарнир 54, снабжена регулируемой вин25 товой пяточной опорой 58. В направг. , i ляющих втулки 57 установлена с возможностью перемещения в горизонтальной плоскости втулка 59, снабженная регулируемой винтовой носочной опорой
30 60. Втулки 57 и 59 связаны регулировочным винтом 61. Пружина 6 2 служит для компенсации массы устройства для установки унта.
Машина работает следующим образом. При включении привода вращаются электродвигатель 1, контрпривод 3, вал 5, шестерни 6 и 7, а также шестерни 8 и 9 и полумуфты, свободно сидящие на валах 10 и 11.
40 Подлежащий обработке унт одет на штуцер пяточной опоры 58 и опирается носочной частью на носочную опору 60. Опоры предварительно отрегулированы на соответствующий размер.
45 Конец ранта пропущен через направляющие пластины матрицы 43 и уложен
35
через шпонку приводит во вращение вал 10 с кулачками 20 и 21 и шестерней 22. От последней приводится во вращение диск 26, который своими карманами захватывает из емкости порцию гвоздей и сбрасывает их на лоток 28.
Часть гвоздей попадает в канал направляющих 29, зависая на головке. Гвозди, которые не попали в канал, падают обратно в емкость. Застрявшие в канале неправильно расположенные гвозди сбрасываются сбрасывателем 27 и также падают обратно в емкость. Обычно за один цикл работы в канал пропадает более одного гвоздя, поэтому в канале есть запасы гвоздей, которые опираются на пластину 33. От : кулачка 20 с помощью ролика 30, рычага 31 пластина 33 совершает воз- вратно-поступательный ход. При этом нижний гвоздь из канала отсекается косым пазом и по трубке 34 падает в патрон 35. Накладка 36 вместе с кулачком 20 поворачивается, при этом штанга 37 сходит с накладки, которая удерживает ее в верхнем положении и под действием своей сильной пружины резко падает. Закрепленный в нижней части штанги 37 молоток 38 забивает гвоздь, прикрепляя рант к стельке на следе унта.
Перед падением штанги с молотком от кулачка 21 через ролик 45, вилку 46, пружину 47, штангу 48 рычаг 50 поднимает все устройство для установки унта с унтом и прижимает его к патрону 35,создавая условия для забивания гвоздя без перекосов if изгибов.После совершения полного оборота обойма 12 с ползу- ном 13 подходит к клину 15, который в связи с кратковременным нажимом на педаль 18 уже освобожден, под действием своей пружины входит в зазор между ползуном 13 и полумуфтой 14 и вытаскивает палец ползуна 13, расцепляя обойму 12 от полумуфты 14. Вал 10 останавливается. Перед выключением вала 10 в последней фазе его поворота кулачок 20 своей накладкой 36 подни- мает штангу 41, сжав4пружину, пластина 33 возвращается в исходное положение. Кулачок 21 освобождает через тягу и двуплечий рычаг устройство для установки унта, которое опускается в нижнее положение.
Затем унт продвигается на требуе- мый размер. Закрепленный на следе
рант выталкивается из направляющих матрицы. Унт снова прижимается к ролику 44, его паз направляет рант в требуемое положение. Снова нажимают на педаль 18. Цикл забивки повторяется. Двухрычажная трехшарнирная система (фиг. 2) позволяет последовательно описать весь профиль следа относительно ролика 44, т.е. после прикрепления ранта в первой точке можно, поворачивая унт, наложить рант на весь периметр следа.
В носочной и пяточной частях, при укладывании ранта на след, во избежание появления складок на ранте необходимо сделать надсечки (фиг. 3). Для этого кратковременно нажимают на педаль 19. При этом сработает одно- оборотная муфта вала 11. Последний поворачивается на один оборот. Кривошип 39 через шатун 40, штангу 41 опускает, а затем поднимает- блок пуансонов 42, которые взаимодействуют с матрицей 43, просекают в ранте треугольные пазы. За один оборот вала 11 просекается требуемое количество пазов (по числу пуансонов) в требуемом месте.
Формула изобретения
1. Машина для крепления деталей низа обуви по контуру, например ранта, содержащая закрепленные на корпусе механизм автоматической подачи гвоздей, молотковый механизм для забивания гвоздей, носочные и пяточные упоры для установки обуви, средство бокового упора и привод с приводным валом, отличающаяся тем, что, с целью обеспечения механизации накладки .и крепления ранта по периметру следа и повышения производительности труда, она имеет механизм вырезки пазов в ранте, установленный с возможностью возвратно-поступательного перемещения в вертикальной плоскости и состоящий из блока .пуансонов, матрицы для размещения ранта, в которой выполнено горизонтальное отверстие для укладки ранта и вертикальные профилированные отверстия для прохождения блока пуансонов, вертикальных колонок на матрице для установки блока пуансонов, штанги, кривошипно-ша- тунного механизма, дополнительного приводного вала для передачи возвратно-поступательного перемещения блоку
пуансонов, установленного параллельно основному приводному валу, а средство бокового упора выполнено в .виде бокового упорного ролика с пазом, установленным на корпусе машины с возможностью регулирования положения относительно контура обуви, при этом блок пуансонов для совершения возвратно-поступательного перемещения кине- Q
матически связан через штангу и кри- вошипно-шатунный механизм с дополнительным приводным валом.
2. Машина по п. 1, отличающаяся тем, что для просечки , пазов ранта на заданном отрезке дополнительный приводной вал снабжен одно- оборотной муфтой, взаимодействующей через тягу с педалью.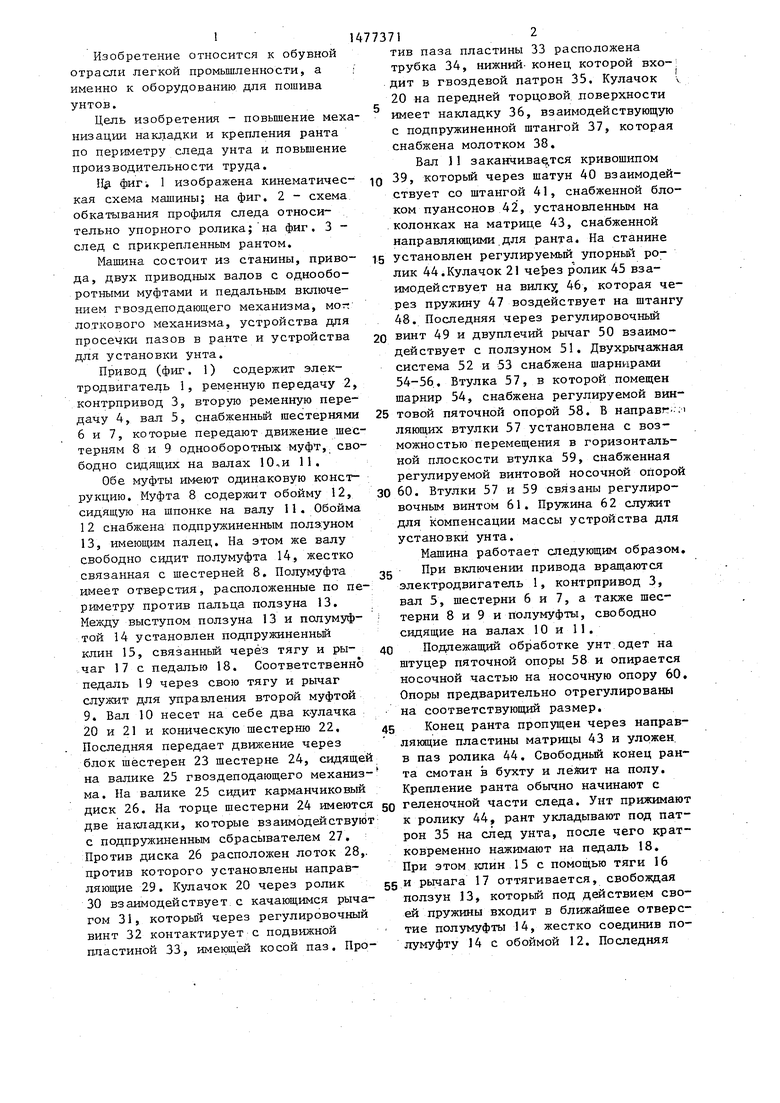


Изобретение относится к обувной отрасли легкой промышленности, а именно к оборудованию для пошива унтов, и преимущественно обеспечивает повышение механизации накладки и крепления ранта по периметру следу унта и повышение производительности труда. Машина имеет механизм автоматической подачи гвоздей, молотковый механизм для забивания гвоздей, носочные и пяточные упоры для установки обуви, средство бокового упора, привод с приводным валом и механизм вырезки пазов в ранте. Механизм вырезки пазов в ранте имеет блок пуансонов, который имеет возможность вертикального возвратно-поступательного перемещения и кинематически связан через штангу и кривошипно-шатунный механизм с дополнительным приводным валом, а матрица имеет горизонтальное отверстие для укладки ранта и вертикальные профильные отверстия для прохождения через эти отверстия блока пуансонов. На корпусе машины, рядом с выходной частью горизонтального отверстия матрицы, установлен регулируемый боковой упорный ролик с пазом для направления ранта. Конец ранта пропускается через направляющие пластины матрицы и укладывается в паз ролика. Рант укладывают на след унта под гвоздезабивной механизм, который молотком забивает гвоздь и прикрепляет рант к стельке унта с поворотом унта на определенный шаг. Таким образом можно выполнять крепление ранта по всему периметру. В носочной и пяточной частях, при укладывании ранта на след, во избежание появления складок на ранте, делаются просечки. Для этого приводят в движение блок пуансонов от дополнительного приводного вала. Блок пунасонов при этом взаимодействует с вертикальными профилированными отверстиями в матрице, через которую проложен рант,и таким образом происходит вырезка пазов в ранте. 1 з.п. ф-лы, 3 ил.
40
62
W5W
J5 M
Рант перед накладкой на след
Редактор М. Вланар
Составитель В. Малышев
Техред М.Ходанич Корректор Н. Король
Заказ 2182/6
Тираж 413
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственногиздательский комбинат Патент, г.Ужгород, ул. Гагарина,101
52 53
Фиг.З
Подписное
| Афанасьева А.А | |||
| и др | |||
| Машины- автоматы и автоматические линии легкой промышленности.-М.: Легкая и пищевая промышленность, 1983, с | |||
| Одноколейная подвесная к козлам дорога | 1919 |
|
SU241A1 |
