(Л
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод | 1989 |
|
SU1707293A1 |
| ГИДРОСИСТЕМА МОБИЛЬНОЙ МАШИНЫ | 2004 |
|
RU2276237C2 |
| Зажимное устройство | 1986 |
|
SU1388245A1 |
| Система защиты гидропривода | 2019 |
|
RU2715442C1 |
| Система защиты гидропривода | 2021 |
|
RU2768631C1 |
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА СТОЙКИ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2252911C2 |
| Гидросистема | 1986 |
|
SU1530826A1 |
| Гидропривод | 1981 |
|
SU1137258A1 |
| Зажимное устройство | 1988 |
|
SU1505724A1 |
| Система защиты гидропривода | 2019 |
|
RU2726959C1 |
Изобретение м.б. использовано в конструкциях промышленных роботов. Цель изобретения - повышение долговечности и точности системы управления манипулятором. Сравнивающее устр-во 3 соединено входами с задатчиком и датчиком 2 давления, выходом - с механизмом управления гидравлического источника 1 питания. Каждый из гидроприводов включает командный блок (Б) 4, исполнительный гидродвигатель 5 и релейный распределитель (Р) 6, гидролинии 7,8 к-рого связаны с гидродвигателем 5, источником 1 питания и сливом, а управляющий вход- с Б 4. Устройство выбора оптимального режима выполнено в виде четырехлинейного пропорционального Р 10, Б 11 определения максимума и редукционного клапана 12. Каждый Б 9 выделения модуля соединен входом с Б 4, а выходом - с одним из входов Б 11, выход к-рого подключен к управляющему входу Р 10. Р 10 установлен на выходе источника 1 питания перед датчиком 2. Р 6 связаны с источником 1 питания через гидролинии 16,17 Р 10, а со сливом - через клапан 12 и две другие гидролинии 19,20 Р 10. Последовательность работы гидроприводом не регламентируется и определяется соотношением воздействующих на нее нагрузок. 1 ил.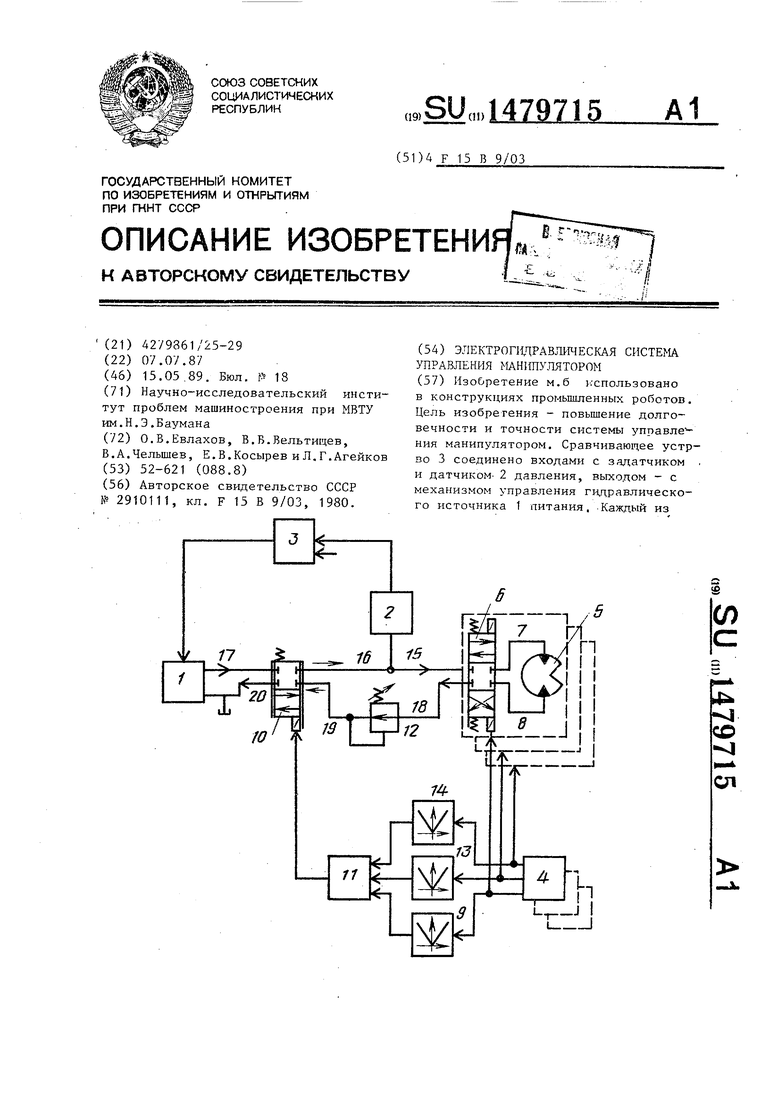
vl
со |
ел
гидроприводов включает командный блок (В) 4, исполнительный гидродви- . гатель 5 и релейный распределитель (Р) 6, гидролинии /, 8 к-рого связаны с гидродвигателем 5, источником 1 питания и сливом, а управляющий вход - с Б 4. Устройство выбора оптимального режима выполнено в виде четырехлинейного пропорционального. Р 10, Б 11 определения максимума и редукционного клапана 12. Каждый Б 9 выделения модуля соединен входом
1
Изобретение относится к гидроавтоматике и может быть использовано в конструкциях промышленных роботов.
Цель изобретения - повышение долговечности и точности.
На чертеже изображена схема электрогидравлической системы управления манипулятором.
Система содержит задатчик (не изображен), гидравлический источник
Iпитания с механизмом управления (не изображен), датчик 2 давления нагнетания, сравнивающее устройство 3, соединенное входами с задатчиком и датчиком 2, а выходом - с механизмом управления, по меньшей мере два одинаковых гидропривода, из которых на чертеже изображен один из них, включающий командный блок 4, исполнительный гидродвигатель 5 с выходным валом (не изображен), релейный распределитель 6 с положительным перекрытием, гидролинии 7, 8 которого связаны с гидродвигателем 5, а управляющий вход - с блоком 4, и блок 9 выделения модуля.
Устройство выбора оптимального режима выполнено в виде четырехлинейного пропорционального распределителя 10, блока 11 определения максимума и редукционного клапана 12, причем блок 9 выделения модуля соединен входом с командным блоком 4, а выходом - с одним из входов блока
IIопределения максимума, остальные входы которого соединены с выходами, например, двух блоков 13, 14 выделения модуля остальных гидроприводов,
с Б 4, а выходом - с одним из входов Б 11, выход к-рого подключен к управляющему входу Р 10. Р 10 установлен на выходе источника 1 питания перед датчиком 2. Р 6 связан с источником 1 питания через гидролинии 16, 17 Р 10, а со сливом - через клапан 12 и две другие гидролинии 19, 20 Р 10. Последовательность работы гидроприводом не регламентируется и определяется соотношением воздействующих на нее нагрузок. 1 ил.
а выход блока 1t подключен к управляющему входу распределителя 10, установленного на выходе источника 1 питания перед датчиком 2. При этом
распределитель 6 связан гидролинией 15 с источником 1 через гидролинии 16, 17 распределителя 10, а гидролинией 18 со сливом - через гидролинии 19, 20 распределителя 10 и редукционный клапан 12. Распределители 6, 10 имеют окна и подвижные элементы (не изображены).
Электрогидравлическая система уп«- равления манипулятором работает слеi дующим образом.
Задатчик формирует опорный сигнал Ubn для настройки давления,
При отсутствии сигналов X командных блоков (в том числе блока 4) ре 0 лейные распределители (в том числе и распределитель 6) обеспечивают надежную фиксацию начальных положений выходных валов исполнительных гидродвигателей. Сигналы на выходе блоков 9, 13 и 14 выделения модуля отсутствуют и, как следствие, на выходе блока 11 появляется нулевой сигнал. Пропорциональный распределитель 10 закрыт и разобщает гидролинию 17 от гидроли0 нии 16, а гидролинию 20 - от гидролинии 19. Так как давление в гидролинии 16 отсутствует, то сигнал с датчика 2 давления нулевой, а величина начального давления Р Mq4H поддержи5 ваемая на выходе источника 1 питания, и определяется уровнем сигнала U ог.
При появлении сигнала X ;, определяющего заданную скорость движения
выходного вала i гидропривода, например изображенного на чертеже командного блока 4, он поступает на релейный распределитель 6 гидропри- вода, переключая его в требуемую позицию. Одновременно сигнал X , проходя через блок 9 выделения модуля и через блок 11 определения максимума, воздействует на распределитель 10 и открывает его. Величина его открытия определяется сигналом IX ;) макс Тем самым обеспечивается подключение всех релейных распределителей (в том числе и распределителя 6) к источни- ку 1 питания. Начинается движение выходного вала исполнительного гидродвигателя 5. Учитывая, что проводимость релейного распределителя 6 значительно больше, чем проводимость распределителя 10, давление в гидролинии 16 (P1(t)) соответствует давлению рабочей жидкости гидрораспределителя 5, преодолевающего нагрузку. Сигнал с датчика 2 давления, который является электрическим аналогом уровня давления в гидролинии 16, алгебраически складывается с U сп и поступает на механизм управления гидравлического источника 1 питания, тем самым перенастраивая давление в гидролинии 17 на уровень PHa4H(t) P,(t) + dP, где ДР - постоянная величина, определяемая сигналом U о,,. Конкретное значение UP (или U on) определяется по расходной характеристике пропорционального распределителя 10 и желаемой крутизне скоростной характеристики гидропривода (на практике достаточно /ЗР 2-3 МПа) . При изменении нагрузки на гидропривод в процессе движения P.,(t) меняется, но одновременно перенастраивается давление на выходе гидравлического источника 1 питания. Таким образом, величина рас- хода жидкости, поступающей в гидродвигатель 5, определяется выражением
где & м«кс максимальная проводимость пропорционального распределителя 10 при максимальном Y м а кссмещении его
Y подвижного элемента Y - макс
нормированное смещение подвижного элемента.
Из выражения (1) следует, что ПНЯГР а следовательно, и скорость вращения выходного вала гидродвигателя 5 будут определяться только величиной Y, т,е, сигналом I X ; f МО(КС и не зависят от параметров нагрузки.
Клапан 12 обеспечивает дополнительную стабилизацию расхода Осл в гидролинии 19. При движении вала гидродвигателя 5 в направлении, совпадающем с направлением воздействующей на гидропривод статической нагрузки, достигнутая скорость определяется в большей степени не величиной Q нвгр, а величиной выходного расхода Qсл. При одинаковых параметрах окон распределителя 10 величина этого расхода определяется выражением
сл
Yd
VP3(t) - Р,
(2)
где Pj(t) - давление в гидролинии 19.
Если настроить клапан 12 на величину P3(t) ДР + РСЛ то величина нагрузки будет совпадать с Q Karp и не будет зависеть от нагрузки на гидропривод (давления Pj(t)).
При снятии сигнала X. релейный распределитель 6 отключает гидродвигатель 5, а гидравлический источник 1 питания перенастраивается на начальное давление PHarf(t) ДР.
Если с командных блоков одновременно поступают два или более сигналов, то в блоке 11 осуществляется селекция поступивших с блоков 9, 13, 14 выделения модуля сигналов )Х,1 на определение максимального сигнала. Гидроприводы начинают отрабатывать заданные движения со скоростью, соответствующей ,,. Последовательность работы гидроприводов не регламентируется и определяется соотношением воздействующих на них нагрузок.
Формула изобретения
Электрогидравлическая система управления манипулятором, содержащая задатчик, гидравлический источник питания с механизмом управления, датчик давления нагнетания, сравнивающее устройство, соединенное входами с задатчиком и датчиком давления, а выходом - с механизмом управления по меньшей мере два гидропривода,
51
каждый из которых включает командный блок, исполнительный гидродвигатель и релейный распределитель, гидролинии которого связаны с гидродвигателем, источником питания и сливом, а управляклций вход - с командным блоком, а также устройство выбора опти- мальног.о режима, отличающаяся тем, что, с целью повышения долговечности и точности, каждый гидропривод снабжен блоком выделения модуля, а устройство выбора оптимального режима выполнено в виде четырехлинейного пропорционального распределителя, блока определения максимума
Составитель С.Рождественский Редактор М.Келемеш Техред Л.Сердюкова
Заказ 2523/35
Тираж 606
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР i 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г.Ужгород, ул. Гагарина,101
/У/156
и редукционного клапана, причем каждый блок выделения модуля соединен входом с командным блоком, а выходом - с одним из входов блока определения максимума, выход которого подключен к управляющему входу пропорционального расппеделителя, установленного на выходе источника пита- Q ния перед датчиком давления, при этом все релейные распределители связаны с источником питания через две гидролинии пропорционального распределителя, а со сливом - через редукционный 15 клапан и две другие гидропинии пропорционального распределителя.
Корректор Э.Лончакова
Подписное
| Авторское свидетельство СССР № 2910111, кл | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
