L
11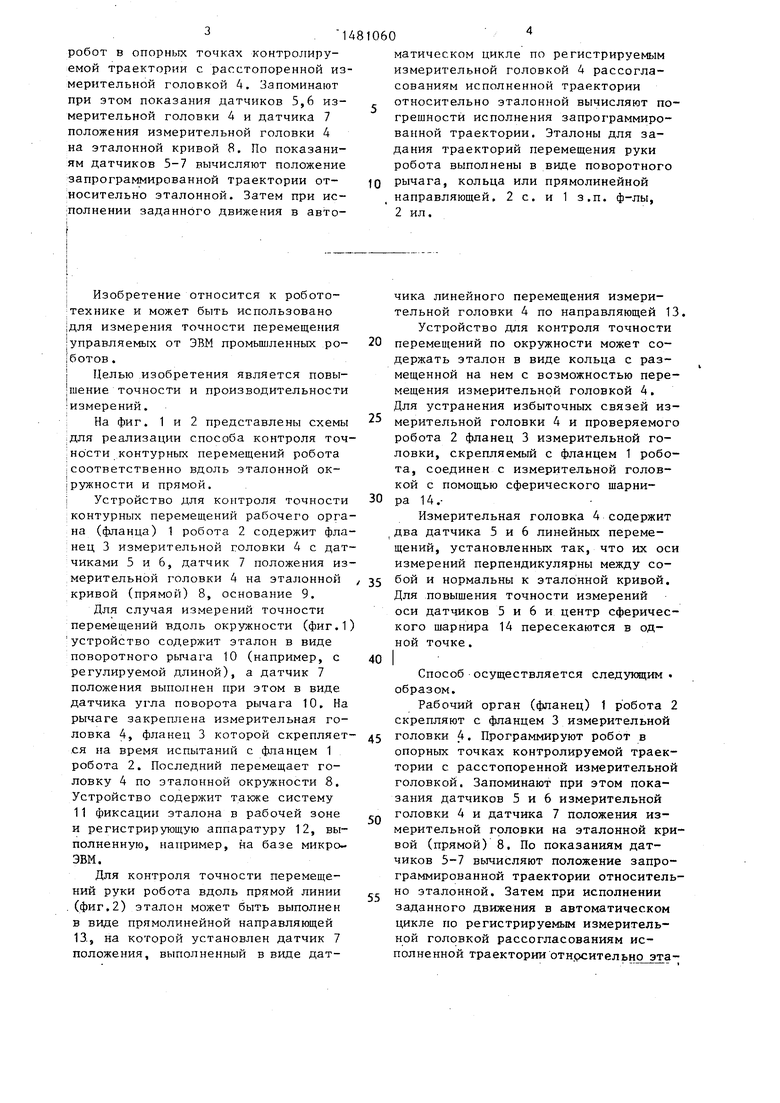
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННЫХ РОБОТОВ | 2011 |
|
RU2466858C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2185953C1 |
| СПОСОБ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННОГО РОБОТА | 2003 |
|
RU2252862C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННОГО РОБОТА | 2011 |
|
RU2472612C1 |
| Стенд для испытания промышленных роботов-манипуляторов | 1987 |
|
SU1425078A1 |
| Стенд для испытания промышленных роботов-манипуляторов | 1987 |
|
SU1495114A1 |
| РОБОТИЗИРОВАННАЯ КУХОННАЯ СИСТЕМА | 2015 |
|
RU2743044C1 |
| Способ измерения абсолютного положения конечного звена многозвенного механизма промышленного робота | 2016 |
|
RU2641604C1 |
| РОБОТИЗИРОВАННАЯ КУХОННАЯ СИСТЕМА (ВАРИАНТЫ), СПОСОБ УПРАВЛЕНИЯ И КУХОННЫЙ МОДУЛЬ С ЕЁ ИСПОЛЬЗОВАНИЕМ (ВАРИАНТЫ) | 2015 |
|
RU2743194C1 |
| СПОСОБЫ И СИСТЕМЫ МАНИПУЛИРОВАНИЯ ОБЪЕКТАМИ С ПОМОЩЬЮ РОБОТА ДЛЯ КОНКРЕТНОГО ПРИМЕНЕНИЯ В ИНСТРУМЕНТАЛЬНОЙ СРЕДЕ С ЭЛЕКТРОННЫМИ БИБЛИОТЕКАМИ МИНИ-МАНИПУЛЯЦИЙ | 2015 |
|
RU2756863C2 |
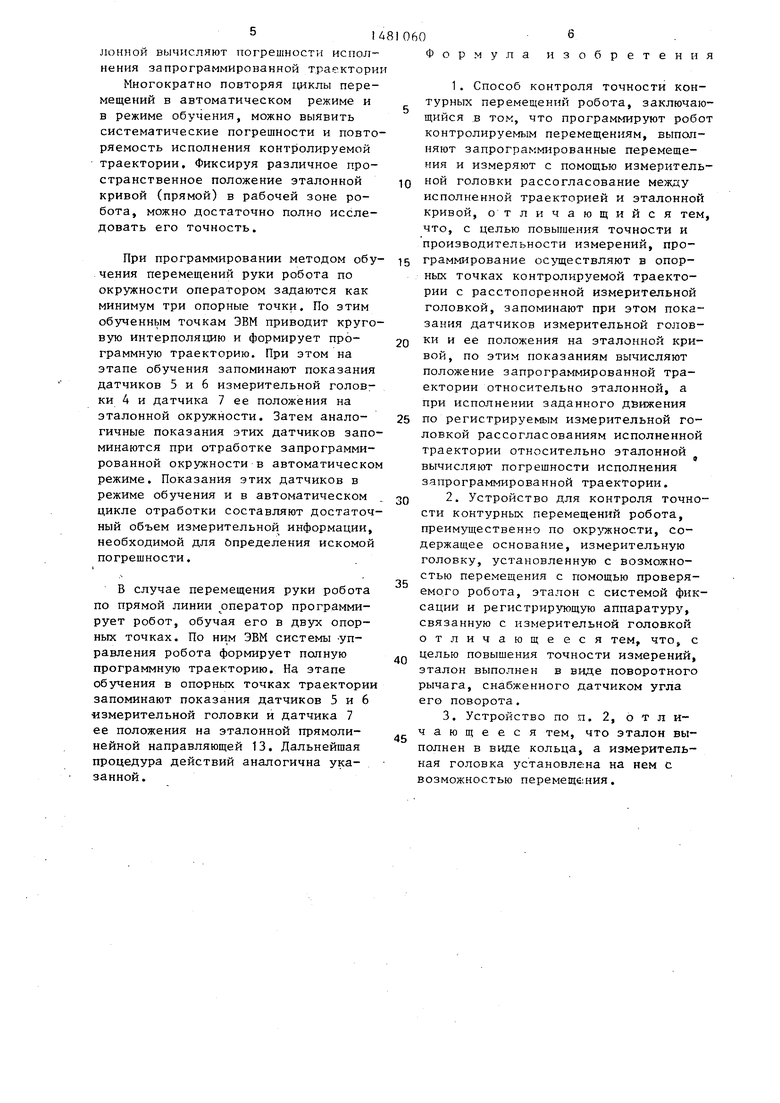
Изобретение относится к робототехнике. Целью изобретения является повышение производительности и точности измерений. Рабочий орган 1 робота 2 скрепляют с фланцем 3 измерительной головки 4. Программируют робот в опорных точках контролируемой траектории с расстопоренной измерительной головкой 4. Запоминают при этом показания датчиков 5,6 измерительной головки 4 и датчика 7 положения измерительной головки 4 на эталонной кривой 8. По показаниям датчиков 5-7 вычисляют положение запрограммированной траектории относительно эталонной. Затем при исполнении заданного движения в автоматическом цикле по регистрируемым измерительной головкой 4 рассогласованиям исполненной траектории относительно эталонной вычисляют погрешности исполнения запрограммированной траектории. Эталоны для задания траекторий перемещения руки робота выполнены в виде поворотного рычага, кольца или прямолинейной направляющей. 2 с.п. и 1 з.п. ф-лы, 2 ил.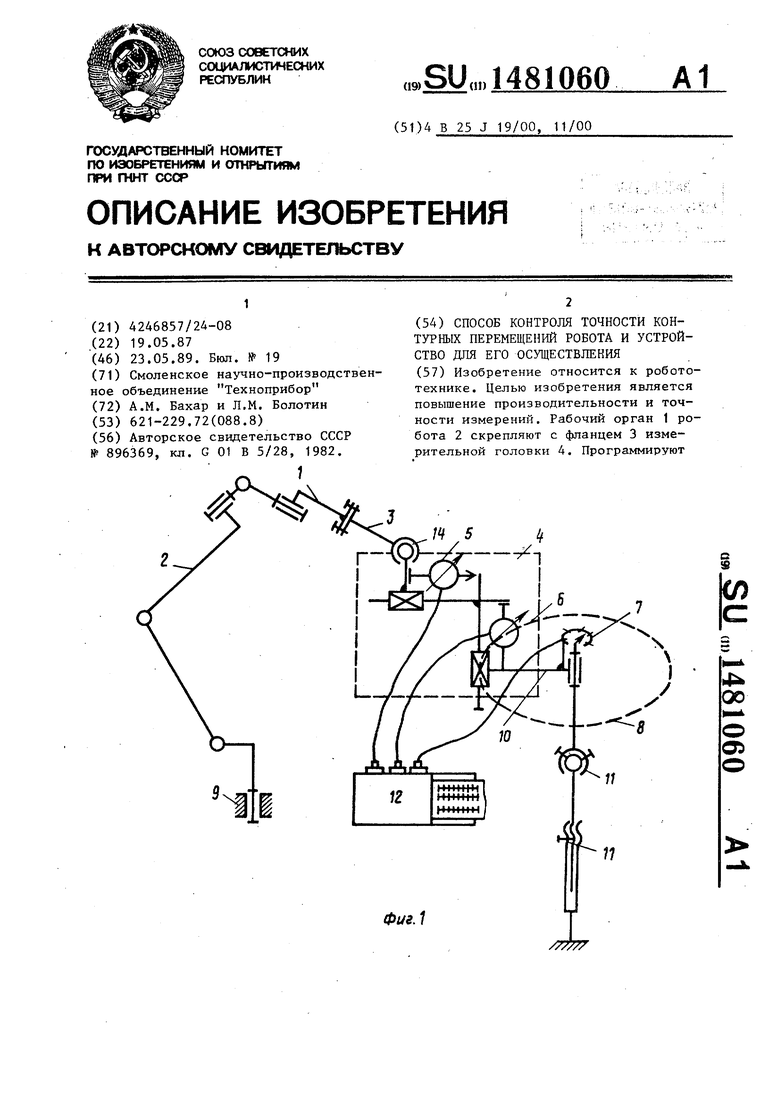
Фиг.1
/77777
робот в опорных точках контролируемой траектории с расстопоренной измерительной головкой 4. Запоминают при этом показания датчиков 5,6 измерительной головки 4 и датчика 7 положения измерительной головки 4 на эталонной кривой 8. По показаниям датчиков 5-7 вычисляют положение запрограммированной траектории относительно эталонной. Затем при исполнении заданного движения в автоИзобретение относится к робототехнике и может быть использовано для измерения точности перемещения управляемых от ЭВМ промышленных ро- ,ботов.
Целью изобретения является повы- шение точности и производительности измерений.
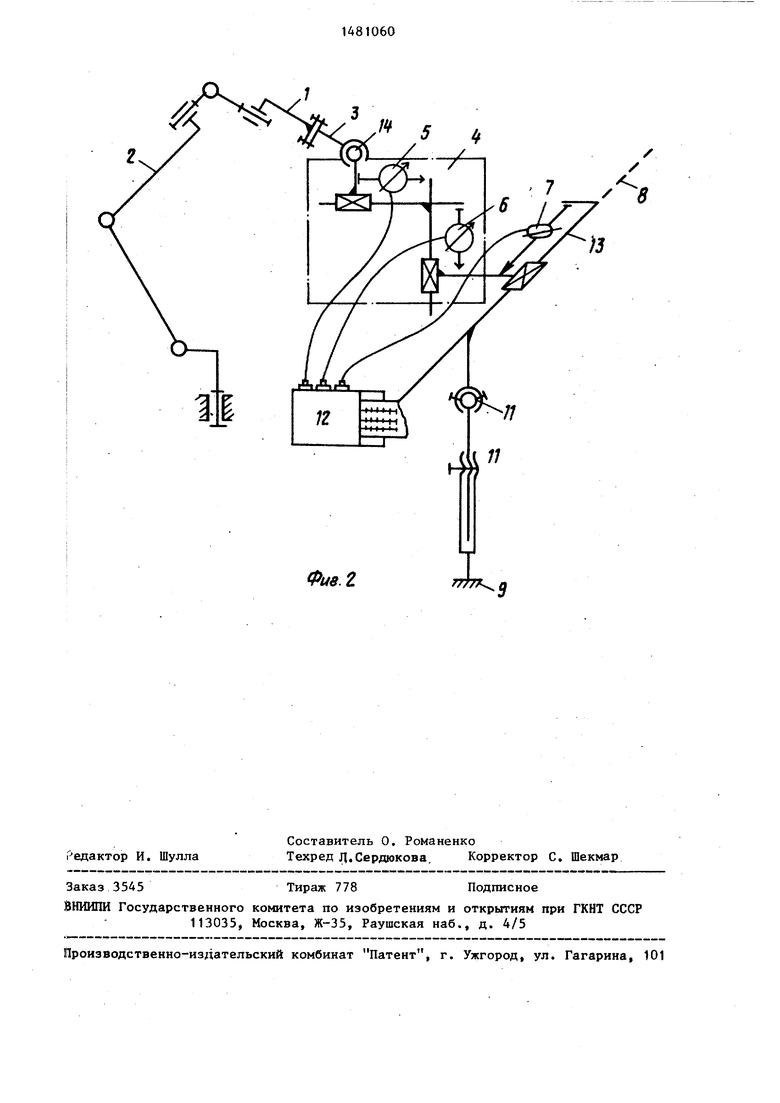
На фиг. 1 и 2 представлены схемы для реализации способа контроля точности контурных перемещений робота соответственно вдоль эталонной окружности и прямой.
Устройство для контроля точности контурных перемещений рабочего органа (фланца) 1 робота 2 содержит фланец 3 измерительной головки 4 с датчиками 5 и 6, датчик 7 положения измерительной головки 4 на эталонной кривой (прямой) 8, основание 9.
Для случая измерений точности перемещений вдоль окружности (фиг.1 устройство содержит эталон в виде поворотного рычага 10 (например, с регулируемой длиной), а датчик 7 положения выполнен при этом в виде датчика угла поворота рычага 10. На рычаге закреплена измерительная головка 4, фланец 3 которой скрепляет ся на время испытаний с фланцем 1 робота 2. Последний перемещает головку 4 по эталонной окружности 8. Устройство содержит также систему 11 фиксации эталона в рабочей зоне и регистрирующую аппаратуру 12, выполненную, например, на базе микро- ЭВМ.
Для контроля точности перемещений руки робота вдоль прямой линии (фиг.2) эталон может быть выполнен в виде прямолинейной направляющей 13, на которой установлен датчик 7 положения, выполненный в виде дат
матическом цикле по регистрируемым измерительной головкой 4 рассогласованиям исполненной траектории относительно эталонной вычисляют погрешности исполнения запрограммированной траектории. Эталоны для задания траекторий перемещения руки робота выполнены в виде поворотного рычага, кольца или прямолинейной направляющей, 2 с. и 1 з.п. ф-лы, 2 ил.
0
5
0 5
0 5
5
0
чика линейного перемещения измерительной головки 4 по направляющей 13.
Устройство для контроля точности перемещений по окружности может содержать эталон в виде кольца с размещенной на нем с возможностью перемещения измерительной головкой 4. Для устранения избыточных связей измерительной головки 4 и проверяемого робота 2 фланец 3 измерительной головки, скрепляемый с фланцем 1 робота, соединен с измерительной головкой с помощью сферического шарнира 1 4 .Измерительная головка 4 содержит tдва датчика 5 и 6 линейных перемещений, установленных так, что их оси измерений перпендикулярны между собой и нормальны к эталонной кривой. Для повышения точности измерений оси датчиков 5 и 6 и центр сферического шарнира 14 пересекаются в одной точке.
Способ осуществляется следующим . образом.
Рабочий орган (фланец) 1 робота 2 скрепляют с фланцем 3 измерительной головки 4. Программируют робот в опорных точках контролируемой траектории с расстопоренной измерительной головкой. Запоминают при этом показания датчиков 5 и 6 измерительной головки 4 и датчика 7 положения измерительной головки на эталонной кривой (прямой) 8. По показаниям датчиков 5-7 вычисляют положение запрограммированной траектории относительно эталонной. Затем при исполнении заданного движения в автоматическом цикле по регистрируемым измерительной головкой рассогласованиям исполненной траектории относительно эталонной вычисляют погрешности исполнения запрограммированной траектори
Многократно повторяя циклы перемещений в автоматическом режиме и в режиме обучения, можно выявить систематические погрешности и повторяемость исполнения контролируемой траектории. Фиксируя различное пространственное положение эталонной кривой (прямой) в рабочей зоне робота, можно достаточно полно исследовать его точность.
При программировании методом обучения перемещений руки робота по окружности оператором задаются как минимум три опорные точки. По этим обученным точкам ЭВМ приводит круговую интерполяцию и формирует программную траекторию. При этом на этапе обучения запоминают показания датчиков 5 и 6 измерительной головки 4 и датчика 7 ее положения на эталонной окружности. Затем аналогичные показания этих датчиков запоминаются при отработке запрограммированной окружности в автоматическом режиме. Показания этих датчиков в режиме обучения и в автоматическом цикле отработки составляют достаточный объем измерительной информации, необходимой для определения искомой погрешности.
В случае перемещения руки робота по прямой линии оператор программирует робот, обучая его в двух опорных точках. По ним ЭВМ системы -управления робота формирует полную программную траекторию. На этапе обучения в опорных точках траектории запоминают показания датчиков 5 и 6 измерительной головки и датчика 7 ее положения на эталонной прямолинейной направляющей 13. Дальнейшая процедура действий аналогична указанной.
0
5
0
5
0
5
0
5
Формупа изобретения
Фив. 2
| Способ контроля точности перемещений руки робота | 1977 |
|
SU896369A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
