(54) СПОСОБ КОНТРОЛЯ ТОЧНОСТИ ПЕРЕМЕЩЕНИЙ , РУКИ РОБОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля точности контурных перемещений робота и устройство для его осуществления | 1987 |
|
SU1481060A1 |
| СПОСОБ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННЫХ РОБОТОВ | 2011 |
|
RU2466858C1 |
| Способ повышения точности перемещений промышленного робота в процессе инкрементального формообразования | 2020 |
|
RU2762693C1 |
| Способ управления роботом | 1988 |
|
SU1579771A1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННОГО РОБОТА | 2011 |
|
RU2472612C1 |
| Способ роботизированной одноточечной инкрементной формовки | 2023 |
|
RU2826673C1 |
| Способ роботизированной одноточечной инкрементной формовки | 2023 |
|
RU2827077C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ НАКОНЕЧНИКА ИЗМЕРИТЕЛЬНОЙ ГОЛОВКИ РОБОТА | 1990 |
|
RU2009882C1 |
| Способ следящего управления приводами измерительных роботов | 1980 |
|
SU1089390A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ НАКОНЕЧНИКА ИЗМЕРИТЕЛЬНОЙ ГОЛОВКИ РОБОТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2009881C1 |
1
Изобрегение относится к авгоматизЕг ции технологических процессов, а именно к средствам и методам контроля промьп ленных роботов.
Нанесгаы способы контроля точности позиционирования руки робота, заключающиеся в том, что в заданных точках пространства устанавливают измерительную оснастку, разрабатывают управляющую программу, обеспечивающую подведение руки робота последовательно в заданные точки, выполняют автоматический цикл перемещения руки робота с остановкой в контролируемых точках и отмечают в этих точках величину рассогласования f tj.
Недостатками таких способов являются дискретная проверка и невозможность контроля точности перемещения обучаемых роботов.
Известны также способы контроля точности перемещений руки робота, заключакмдийся в том, что используют специальную измерительную оснастку, позволяющую измерить положение руки
робота в заданной точке по заданным перемещениям, проводя его руку через заданные контрольные точки, вьтолняют автоматический цикл перемещения его и измеряют рассогласование между заданным и исполненным положениями помощью упомянутой измерительной оснастки 2.
Недостатком этих способов является сложность оснастки и дискретный харакtoтер .
Цель изобретения - упрощение способа и обеспеч«1ие непрерывных измерений.
Эта цель достигается за счет того,
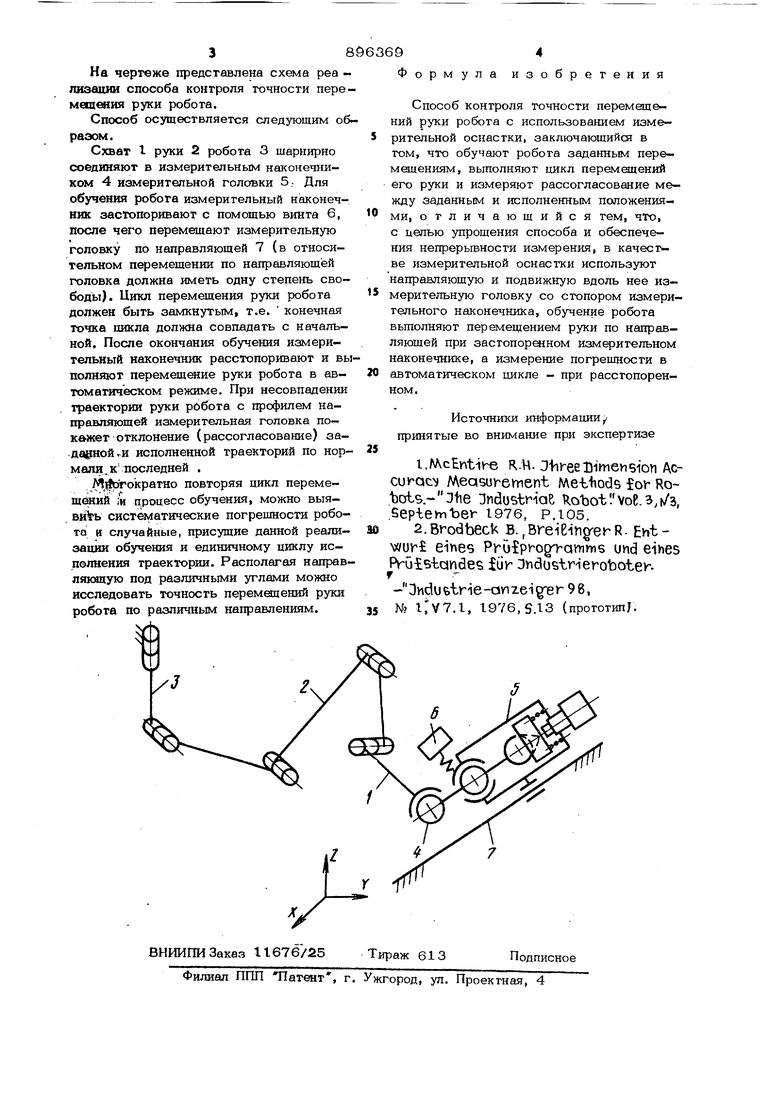
ts что в качестве измерительной оснастки используют направлякицую и подвижную вдоль нее измерительную головку со стопором взм ительяого наконечника, обучение робота вьшолняют перемощением
20 рукя по направляющей при застопоренном наконечнике, а измерение погрешностей . обработки в автоматическом цикле - при расстопореннсм.
