(21)4309473/27-03
(22)25.09.87
(46) 23.05.89. Бюл. № 19
(71)Всесоюзный научно-исследовательский проектно-конструкторский и технологический институт безрельсового электрифицированного транспорта с опытным производством
(72)А.В.Куринов
(53)621.867(088.8) .
(56)Авторское свидетельство СССР № 323252, кл.. В 23 G 7/14, 1972.
Патент США № 4277217, кл. В 65 G 25/08, опублик. 1981.
(54)УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗА
(57)Изобретение относится к транспортному машиностроению и м.б. использовано в конструкциях электротележек- роботов, применяемых в гибких производственных системах. Цель - повышение надежности работы устройства. На
раме 1 смонтированы два ряда 2 и 3 приводных роликов (Р) 4, между которыми установлен с возможностью возвратно-поступательного перемещения сталкиватель (С) 16. Он имеет боковые пластины с пазами, имеющими прямолинейные и криволинейные участки. В пазах размещены катки, установленные на свободных концах захватов 35. При этом С 16 имеет возможность телеско- .пического выдвижения на обе стороны устройства. Вращение Р 4 осуще твля- ется от двигателя через цепную передачу. Выдвижение С 16 осуществляется от силового цилиндра, размещенного на раме 1, и связанного с захватами 35 незамкнутым тяговым органом. Передаваемый объект транспортируется по Р 4 и поступает на С 16. Захваты 35 фиксируют объект и С 16 выдвигается на необходимую величину для передачи объекта на станцию перегрузки. 9 ил.
S
(/
с: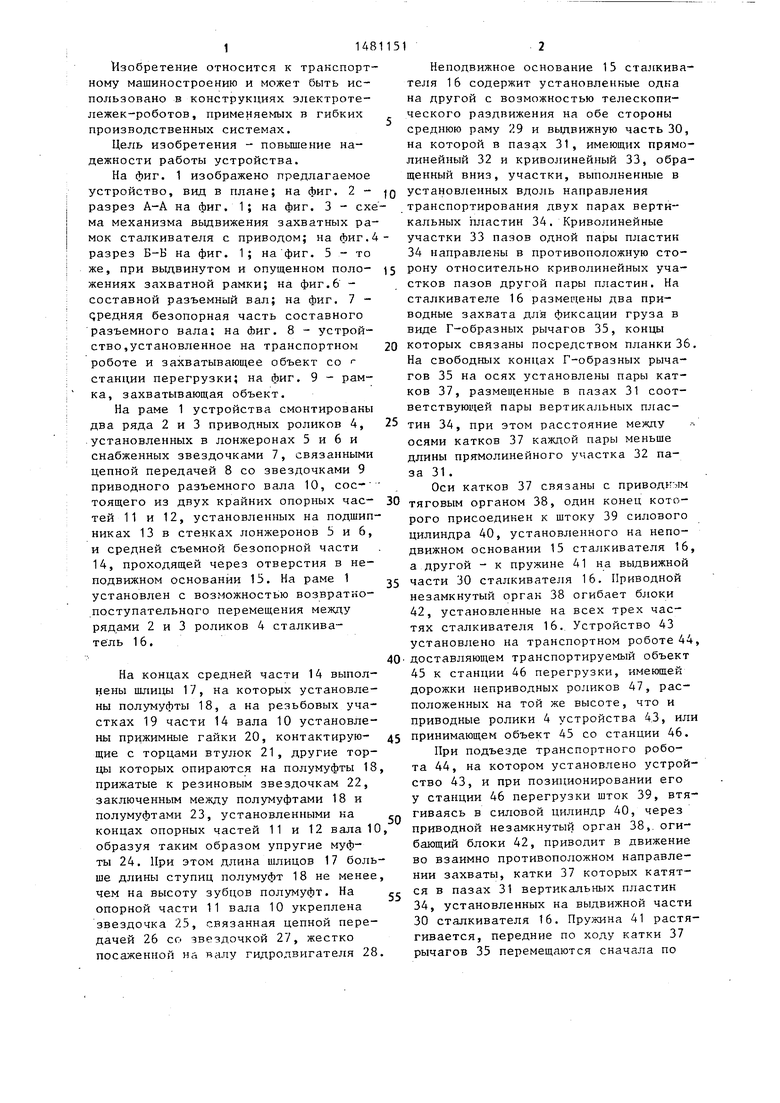
| название | год | авторы | номер документа |
|---|---|---|---|
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Устройство для погрузки штучных грузов в вагон | 1981 |
|
SU1024401A1 |
| Устройство для комплектации печатной корреспонденции | 1989 |
|
SU1678462A1 |
| Транспортно-накопительная система | 1988 |
|
SU1682255A1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА ПАКОВОК С ТРАНСПОРТЕРА И ПЕРЕГРУЗКИ ИХ НА ТРАНСПОРТНЫЙ МОДУЛЬ | 1992 |
|
RU2036830C1 |
| Устройство для перегрузки бытовых отходов из мусоропровода в транспортное средство | 1989 |
|
SU1752692A1 |
| Устройство для перегрузки грузов на приемные конвейеры | 1988 |
|
SU1655874A1 |
| Транспортная система для несинхронных автоматических линий | 1976 |
|
SU738835A1 |
| ТЕЛЕСКОПИЧЕСКОЕ ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО | 1990 |
|
SU1837550A1 |
| Устройство для уборки просыпи под конвейером | 1982 |
|
SU1097541A1 |
Изобретение относится к транспортному машиностроению и может быть использовано в конструкциях электротележек- роботов, применяемых в гибких производственных системах. Цель - повышение надежности работы устройства. На раме 1 смонтированы два ряда 2 и 3 приводных роликов (Р) 4, между которыми установлен с возможностью возвратно-поступательного перемещения сталкиватель (С) 16. Он имеет боковые пластины с пазами, имеющими прямолинейные и криволинейные участки. В пазах размещены катки, установленные на свободных концах захватов 35. При этом С 16 имеет возможность телескопического выдвижения на обе стороны устройства. Вращение Р 4 осуществляется от двигателя через цепную передачу. Выдвижение С 16 осуществляется от силового цилиндра, размещенного на раме 1 и связанного с захватами 35 незамкнутым тяговым органом. Передаваемый объект транспортируется по Р 4 и поступает на С 16. Захваты 35 фиксируют объект и С 16 выдвигается на необходимую величину для передачи объекта на станцию перегрузки. 9 ил.
т
114
Изобретение относится к транспортному машиностроению и может быть использовано в конструкциях электротележек-роботов, применяемых в гибких производственных системах.
Цель изобретения - повышение надежности работы устройства.
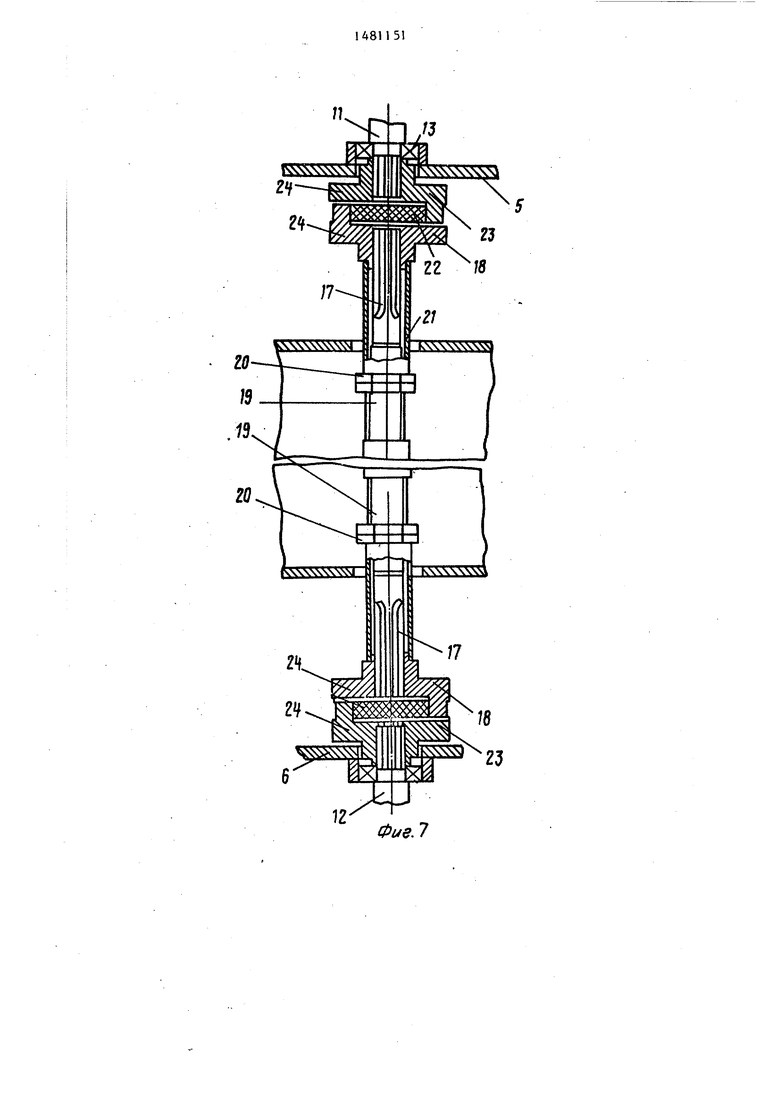
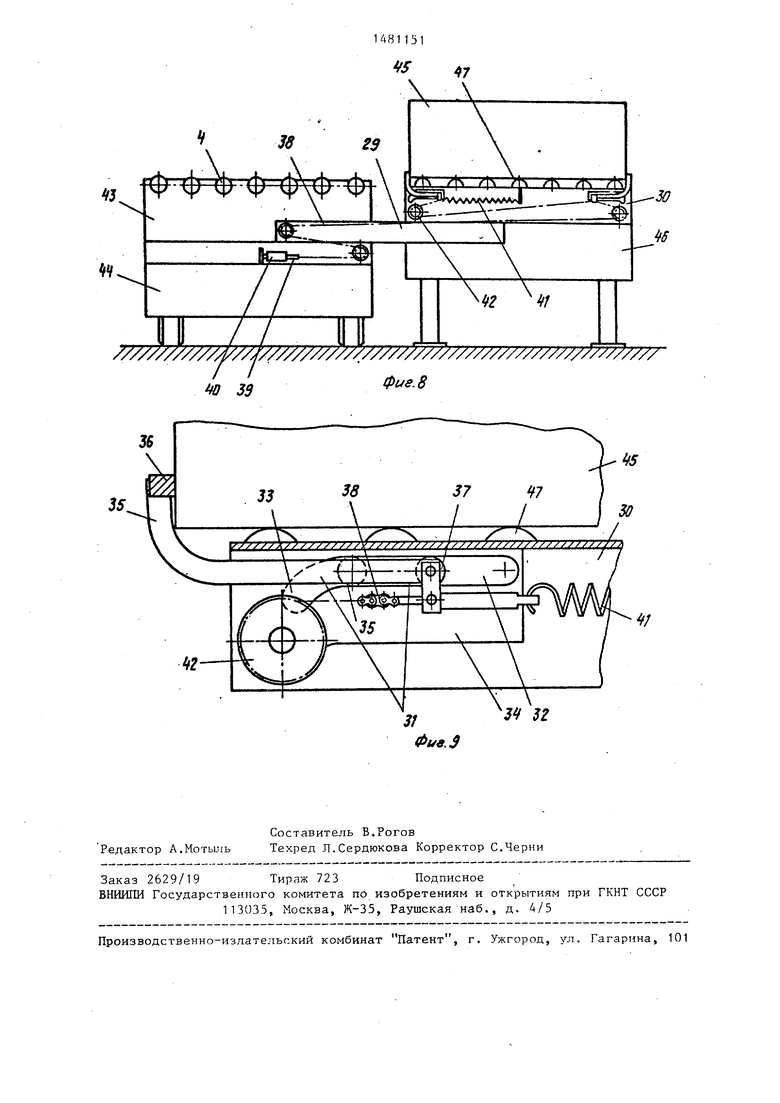
На фиг. 1 изображено предлагаемое устройство, вид в плане; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - схма механизма выдвижения захватных рамок сталкивателя с приводом; на фиг. разрез Б-Б на фиг. 1; на фиг. 5 - то же, при выдвинутом и опущенном положениях захватной рамки; на фиг.6 - составной разъемный вал; на фиг. 7 - дредняя безопорная часть составного разъемного вала; на Лиг. 8 - устройство,установленное на транспортном роботе и захватывающее объект со станции перегрузки; на фиг. 9 - рамка, захватывающая объект.
На раме 1 устройства смонтированы два ряда 2 и 3 приводных роликов 4, установленных в лонжеронах 5 и 6 и снабженных звездочками 7, связанными цепной передачей 8 со звездочками 9 приводного разъемного вала 10, сое- тоящего из двух крайних опорных частей 11 и 12, установленных на подшипниках 13 в стенках лонжеронов b и 6, и средней съемной безопорной части 14, проходящей через отверстия в неподвижном основании 15. На раме 1 установлен с возможностью возвратно- поступательного перемещения между рядами 2 и 3 роликов 4 сталкива- тель 16.
40
На концах средней части 14 выполнены шлицы 17, на которых установлены полумуфты 18, а на резьбовых участках 19 части 14 вала 10 установлены прижимные гайки 20, контактирующие с торцами втулок 21, другие торцы которых опираются на полумуфты 18, прижатые к резиновым звездочкам 22, заключенным между полумуфтами 18 и полумуфтами 23, установленными на „ концах опорных частей 11 и 12 вала 10, образуя таким образом упругие муфты 24. При этом длина шлицов 17 больше длины ступиц полумуфт 18 не менее,
45
чем на высоту зубцов полумуфт. На опорной части 11 вала 10 укреплена звездочка 25, связанная цепной передачей 26 со звездочкой 27, жестко посаженной на валу гидродвигателя 28.
0
5
0
5
0
0
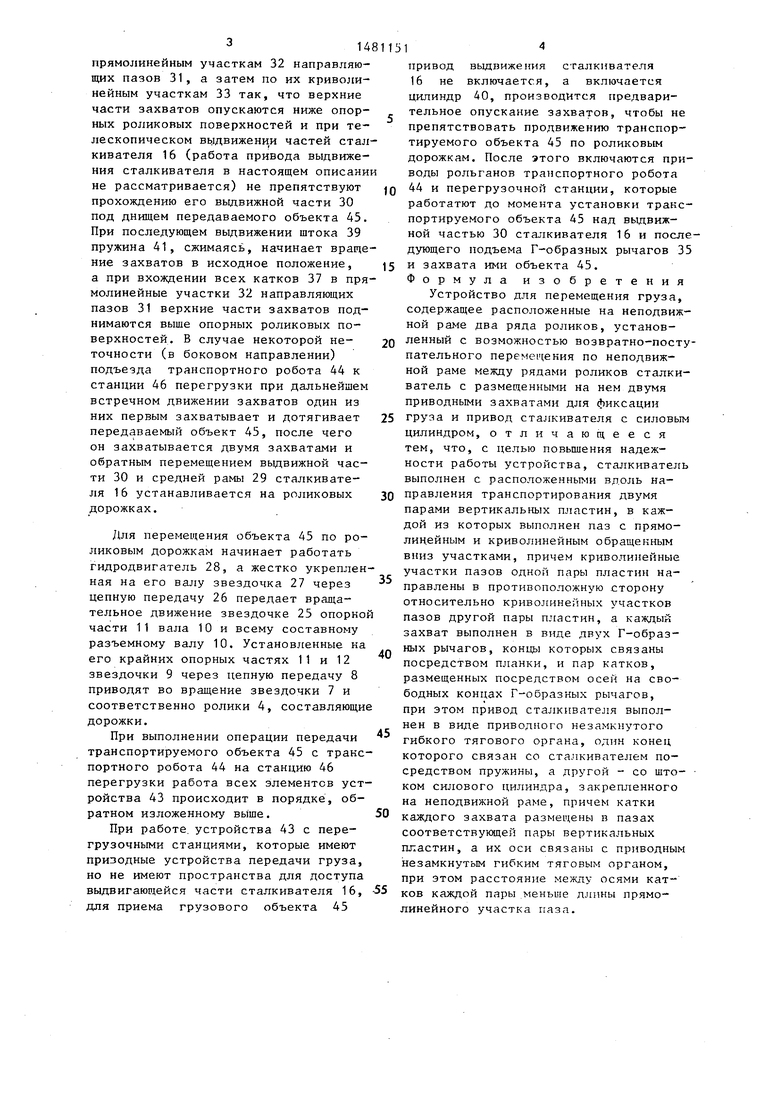
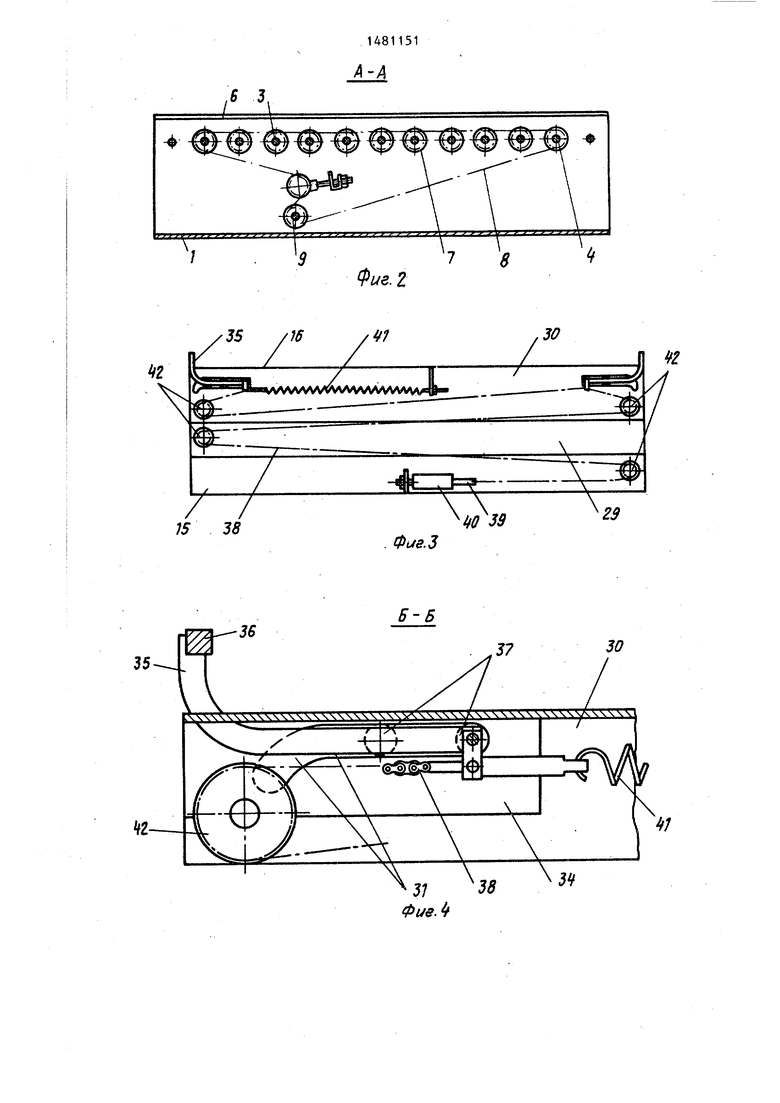
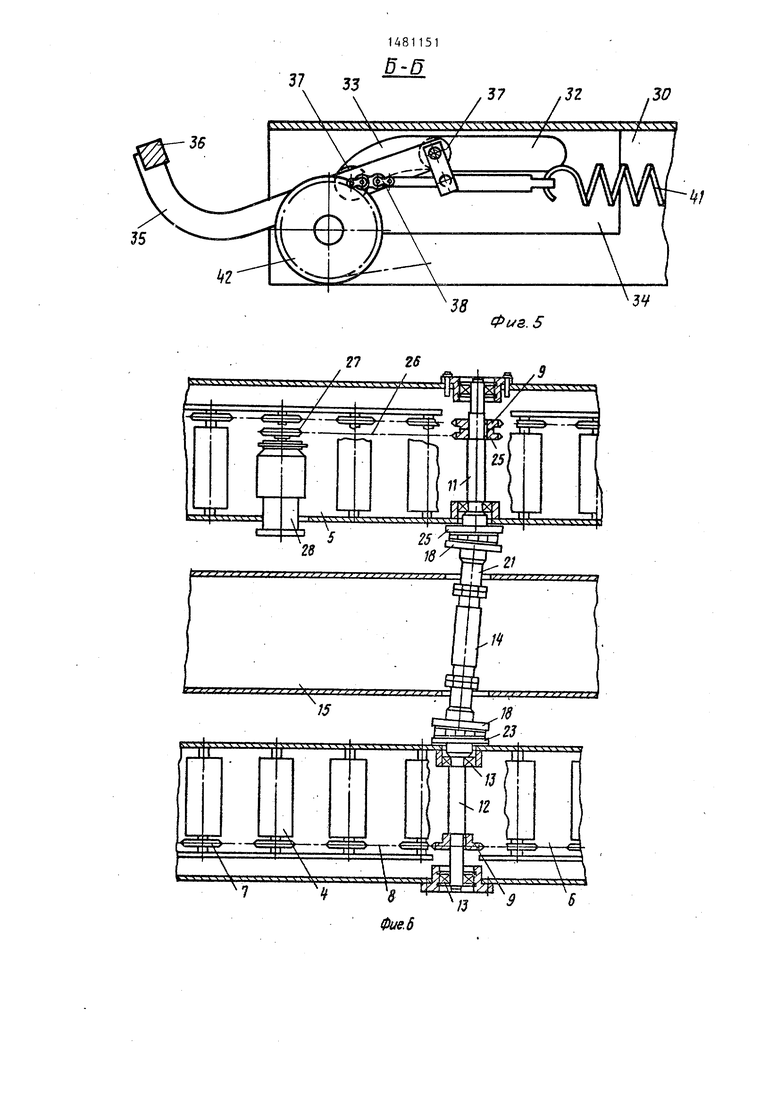
Неподвижное основание 15 сталкивателя 16 содержит установленные одна на другой с возможностью телескопического раздвижения на обе стороны среднюю раму 29 и выдвижную часть 30, на которой в пазах 31, имеющих прямолинейный 32 и криволинейный 33, обращенный вниз, участки, выполненные в установленных вдоль направления транспортирования двух парах вертикальных пластин 34. Криволинейные участки 33 пазов одной пары пластин 34 направлены в противоположную сторону относительно криволинейных участков пазов другой пары пластин. На сталкивателе 16 размещены два приводные захвата для фиксации груза в виде Г-образных рычагов 35, концы которых связаны посредством планки 36, На свободных концах Г-образных рычагов 35 на осях установлены пары катков 37, размещенные в пазах 31 соответствующей пары вертикальных пластин 34, при этом расстояние между осями катков 37 каждой пары меньше длины прямолинейного участка 32 паза 31.
Оси катков 37 связаны с приводгъпч тяговым органом 38, один конец которого присоединен к штоку 39 силового цилиндра 40, установленного на неподвижном основании 15 сталкивателя 16, а другой - к пружине 41 на выдвижной части 30 сталкивателя 16. Приводной незамкнутый орган 38 огибает блоки 42, установленные на всех трех частях сталкивателя 16. Устройство 43 установлено на транспортном роботе 44, доставляющем транспортируемый объект 45 к станции 46 перегрузки, имеющей дорожки неприводных роликов 47, расположенных на той же высоте, что и приводные ролики 4 устройства 43, или 5 принимающем объект 45 со станции 46.
При подъезде транспортного робота 44, на котором установлено устройство 43, и при позиционировании его у станции 46 перегрузки шток 39, втягиваясь в силовой цилиндр 40, через приводной незамкнутый орган 38, огибающий блоки 42, приводит в движение во взаимно противоположном направлении захваты, катки 37 которых катятся в пазах 31 вертикальных пластин 34, установленных на выдвижной части 30 сталкивателя 16. Пружина 41 растягивается, передние по ходу катки 37 рычагов 35 перемещаются сначала по
5
5
3148
прямолинейным участкам 32 направляющих пазов 31, а затем по их криволинейным участкам 33 так, что верхние части захватов опускаются ниже опорных роликовых поверхностей и при телескопическом выдвижении частей стал- кивателя 16 (работа привода выдвижения сталкивателя в настоящем описании не рассматривается) не препятствуют прохождению его выдвижной части 30 под днищем передаваемого объекта 45. При последующем выдвижении штока 39 пружина 41, сжимаясь, начинает вращение захватов в исходное положение, а при вхождении всех катков 37 в прямолинейные участки 32 направляющих пазов 31 верхние части захватов поднимаются выше опорных роликовых поверхностей. В случае некоторой не- точности (в боковом направлении) подъезда транспортного робота 44 к станции 46 перегрузки при дальнейшем встречном движении захватов один из них первым захватывает и дотягивает передаваемый объект 45, после чего он захватывается двумя захватами и обратным перемещением выдвижной части 30 и средней рамы 29 сталкивателя 16 устанавливается на роликовых дорожках.
Для перемещения объекта 45 по роликовым дорожкам начинает работать гидродвигатель 28, а жестко укрепленная на его валу звездочка 27 через цепную передачу 26 передает вращательное движение звездочке 25 опорной части 11 вала 10 и всему составному разъемному валу 10. Установленные на его крайних опорных частях 11 и 12 звездочки 9 через цепную передачу 8 приводят во вращение звездочки 7 и соответственно ролики 4, составляющие дорожки.
При выполнении операции передачи транспортируемого объекта 45 с транспортного робота 44 на станцию 46 перегрузки работа всех элементов устройства 43 происходит в порядке, обратном изложенному выше.
При работе устройства 43 с перегрузочными станциями, которые имеют призодные устройства передачи груза, но не имеют пространства для доступа выдвигающейся части сталкивателя 16, для приема грузового объекта 45
Q 5 0 5 0
5
э 0
0
привод выдвижения сталкивателя 16 не включается, а включается цилиндр 40, производится предварительное опускание захватов, чтобы не препятствовать продвижению транспортируемого объекта 45 по роликовым дорожкам. После этого включаются приводы рольганов транспортного робота 44 и перегрузочной станции, которые работатют до момента установки транспортируемого объекта 45 над выдвижной частью 30 сталкивателя 16 и последующего подъема Г-образных рычагов 35 и захвата ими объекта 45. Формула изобретения Устройство для перемещения груза, содержащее расположенные на неподвижной раме два ряда роликов, установленный с возможностью возвратно-поступательного перемещения по неподвижной раме между рядами роликов сталки- ватель с размещенными на нем двумя приводными захватами для фиксации груза и привод сталкивателя с силовым цилиндром, отличающееся тем, что, с целью повышения надежности работы устройства, сталкиватель выполнен с расположенными вдоль направления транспортирования двумя парами вертикальных пластин, в каждой из которых выполнен паз с прямолинейным и криволинейным обращенным вниз участками, причем криволинейные участки пазов одной пары пластин направлены в противоположную сторону относительно криволинейных участков пазов другой пары пластин, а каждый захват выполнен в виде двух Г-образных рычагов, концы которых связаны посредством планки, и пар катков, размещенных посредством осей на свободных концах Г-образных рычагов, при этом привод сталкивателя выполнен в виде приводного незамкнутого гибкого тягового органа, один конец которого связан со сталкивателем посредством пружины, а другой - со штоком силового цилиндра, закрепленного на неподвижной раме, причем катки каждого захвата размещены в пазах соответствующей пары вертикальных пластин, а их оси связаны с приводным незамкнутым гибким тяговым органом, при этом расстояние между осями катков каждой пары меньше длины прямолинейного участка паза.
30
29
Фие.З
В-Б
Фие.Ь
ы
Фиг. 5
23
Фие. 7
J5
.
к so
Фив.З
