Изобретение относится к автоматическому управлению и регулированию существенно нестационарными объектами.
Целью изобретения является повышение качества процессов управления путем устранения их колебательности.
На чертеже представлена структурная схема бинарной системы управления.
В бинарную систему управления входят первый сумматор 1, умножитель 2, объект 3 управления, блок 4 сравнения, задатчик 5, дифференциаторы 6i..,6 n-1 группы, усилители 7i...7n первой группы, второй сумматор 8, элементы 9i..,9n определения модуля, усилители 10i...10n второй группы, релейный элемент 11, интегратор 12 с ограничением, а также третий сумматор 13, дополнительные дифференциатор 14 и усилитель 15.
Система работает следующим образом.
Выходной сигнал y(t) объекта 3 управления сравнивается с сигналом ys(t) задэтчика 5 в блоке 4 сравнения. Полученный сигнал xi(t) поступает на вход элемента 9i определения модуля, а на вход остальных элементов 92...9П определения модуля чере-з соответствующие дифференциаторы 6t.. ...6гИ - сигнал с целью получения необходимой для управления информации о состоянии объекта управления. Сигналы с выходов элементов определения модуля через соответствующие усилители 10i.,.10n подаются на вход сумматора 1, с выхода которого сигнал подается на первый вход умножителя 2, выходной сигнал которого поступает на вход объекта 3 управления.
Рассмотренный контур координатно- обратной связи (КОС) обеспечивает решение поставленной задачи управления для объекта, имеющего постоянные параметры. С целью обеспечения требуемого качества управления для объекта с переменными параметрами вводится дополнительный контур координзтно-операторной обратной связи (КООС), автоматически изменяющий параметры контура КОС в зависимости от текущего состояния объекта.При этом коэффициент передачи замкнутой системы объект-регулятор изменяется в зависимости от изменения параметров объекта. Для устранения этой зависимости в контуре КОС формируется производная от сигнала ошибки регулирования контура.
Контур КООС функционирует следующим образом.
Сигнал ошибки регулирования xi(t) с выхода блока 4 сравнения и сигналы с выходов дифференциаторов 6i...6n-i через соответствующие усилители 7i...7n подаются
на входы второго сумматора 8. Полученная на выходе линейная комбинация ошибки xi (t) и ее (п-1) производных является ошибкой регулирования а (т.) контура КООС. На выходе третьего сумматора 13 образуется
линейная комбинация 6 (t) производной от r(t), полученной на выходе дополнительного дифференциатора 14, и самой ошибки регулирования, пропущенной через усилитель 15. Значение сигнала 6(t) используется
для изменения параметров контура КОС сигналом/г (t) таким образом, чтобы стабилизировать скорость изменения регулируемых координат объекта.
Стабилизация скорости изменения координат позволяет устранить колебательность процессов в системе управления.
Включение в контур КООС интегратора 12 обеспечивает непрерывностьуправля- кж1их воздействий u(t) на объект управления.
Формула изобретения
Бинарная система управления, содержащая последовательно соединенные первый сумматор, умножитель, объект управления и блок сравнения, второй вход которого соединен с выходом задатчика, а выход - с входами дифференциаторов группы, выходь( которых и выход блока сравнения соединены через соответствующие усилители первой группы с входами второго сумматора, а через соответствующие элементы определения модуля -свходами соответствующих усилителей второй группы, выходы которых подключены j соответствующим входам первого сумматора, релейный элемент, последовательно соединенный с интегратором с ограничением, выход которого соединен с
вторым входом умножителя, отличающаяся тем, что, с целью повышения качества процессов управления путем устранения колебательности, в нее введены третий сумматор, дополнительные дифференциатор и усилитель, входы которых соединены с выходом второго сумматора, а выходы - с соответствующими входами третьего сумматора, выход которого подключен к входу релейного элемента.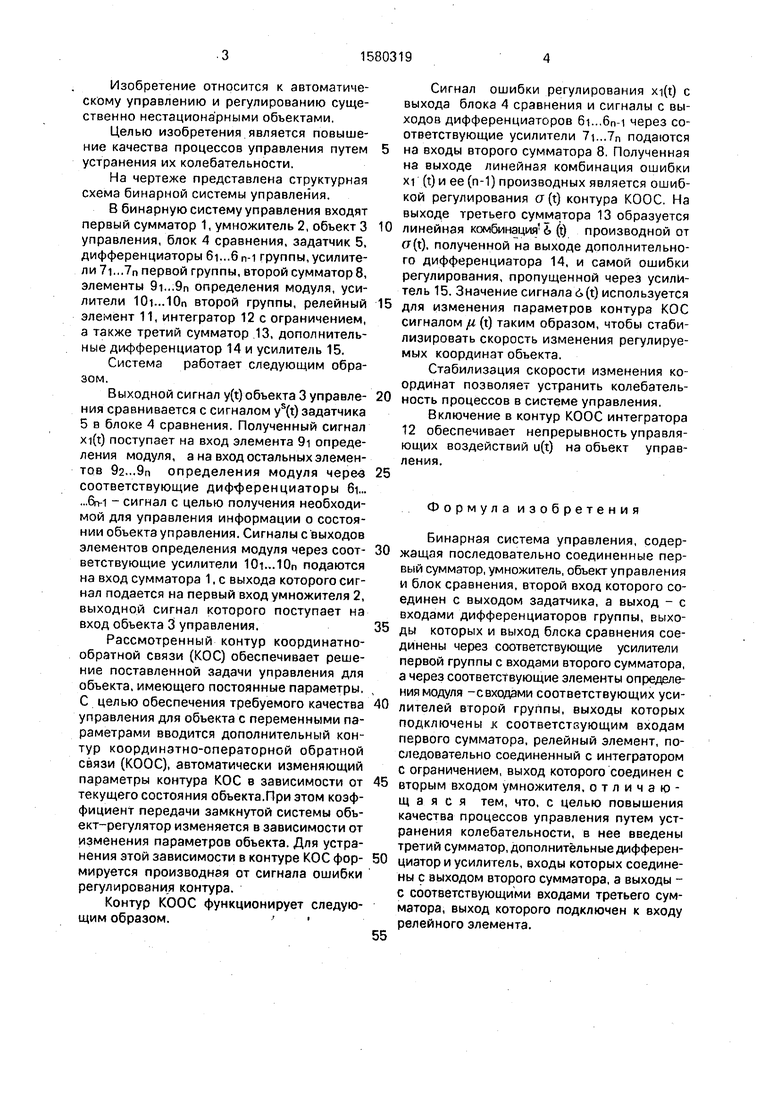
| название | год | авторы | номер документа |
|---|---|---|---|
| Бинарная система управления | 1988 |
|
SU1640670A1 |
| Бинарная система управления | 1990 |
|
SU1705802A1 |
| Система управления с координатно-параметрической обратной связью | 1983 |
|
SU1126927A1 |
| Бинарная система оптимальной стабилизации | 1988 |
|
SU1837255A1 |
| Бинарная система управления | 1988 |
|
SU1837254A1 |
| Бинарная система управления объектами с запаздыванием | 1986 |
|
SU1383294A1 |
| Бинарная система управления | 1983 |
|
SU1120284A1 |
| Бинарная система управления нелинейными объектами | 1985 |
|
SU1305631A1 |
| Бинарная система управления вынужденным движением | 1983 |
|
SU1117587A1 |
| ЭЛЕКТРОПРИВОД С АВТОМАТИЧЕСКОЙ ПОДСТРОЙКОЙ ЧАСТОТЫ ВХОДНОГО ГАРМОНИЧЕСКОГО СИГНАЛА | 2008 |
|
RU2399079C2 |
Изобретение относится к автоматическому управлению и регулированию существенно нестационарным объектам и предназначено для управления с заданными показателями качества свободным движением объекта которого и скорость их изменения произвольно меняются в известных ограниченных диапазонах. Для уменьшения зависимости коэффициента усиления в замкнутом контуре управления от изменения параметров объекта и улучшения динамики переходных процессв в системы дополнительно введен задатчик свойств контура, выпоненный в виде дифференциатора 14 и усилителя 15, входы которых соединены с выходом сумматора 8, а выходы подключены к сумматору 13. Этим повышается качество процессов управления путем устранения их коллебательности, что является целью изобретения. 1 ил.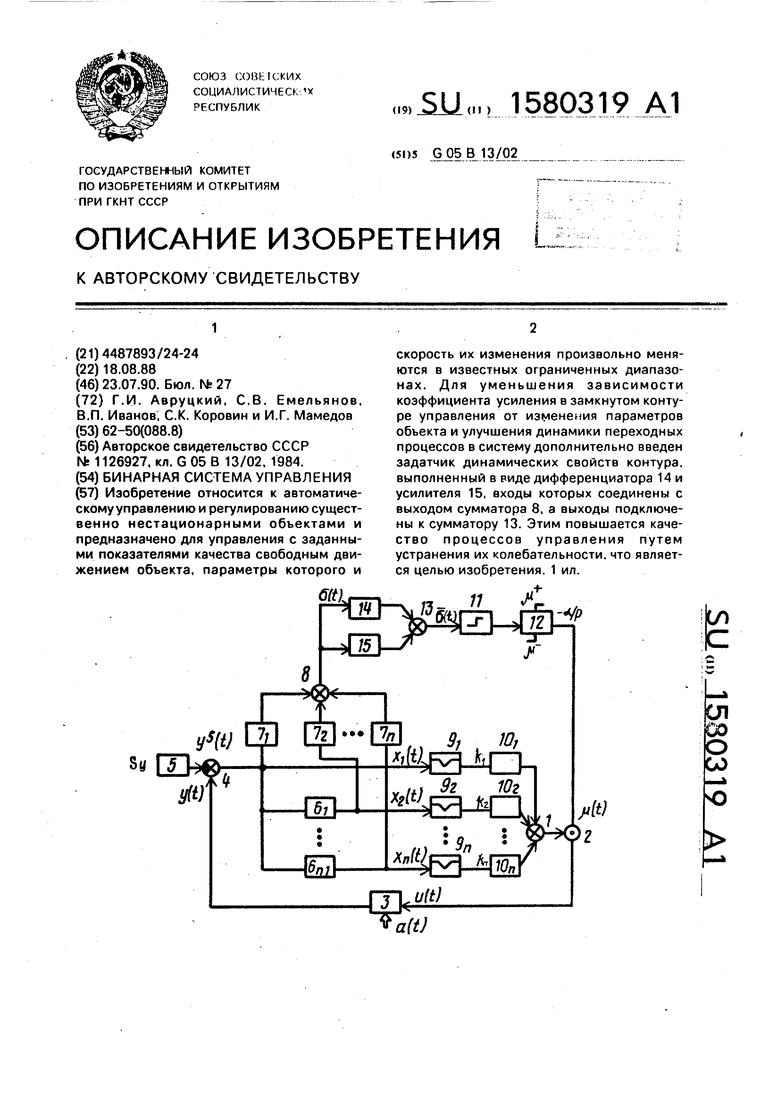
| Система управления с координатно-параметрической обратной связью | 1983 |
|
SU1126927A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
