Изобретение относится к оборудованию судового глубоководного добычного комплекса, оснащенного спуско-подъемной вышкой, требующей стабилизации вертикального положения вышки с требуемой точностью для обеспечения соединения трубных секций при монтаже (и демонтаже) системы подъема в условиях качки судна на волне, а также может быть использовано в оборудовании буровых судов при необходимости стабилизации вертикального положения буровой вышки, совместно с осью бурильной колонны при параллельности этой оси общему полю гравитации с целью уменьшения изгибающих напряжений, возникающих в колонке при качке судна на волне, кроме того, изобретение относится к системам регулирования пространственного положения вышки по крену и тангажу при построении систем регулирования с обратными связями.
Цель изобретения чества регулирования.
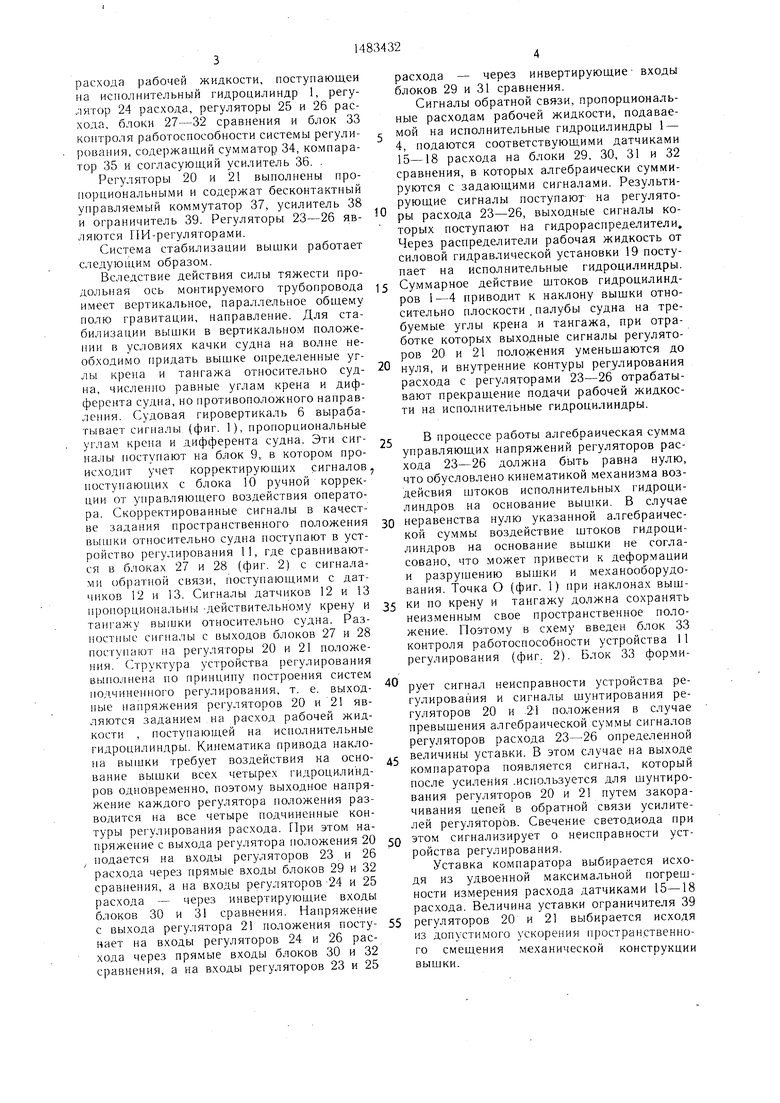
повышение каНа фиг. 1 представлена функциональная схема системы стабилизации; на фиг. 2 - схема устройства регулирования параметров приводов гидроцилиндров.
Система стабилизации вышки содержит приводы гидроцилиндров 1-4, которые воздействуя своими штоками на основание вышки 5, могут придавать вышке определенный крен и тангаж относительно судна, судовую гировертикаль 6, блок 9 формирования задающих сигналов, блок 10 ручной коррекции, устройство 11 регулирования, датчики крена 12 и тангажа 13 вышки, блок 14 гидрораспределителей, датчики 15-18 расхода рабочей жидкости, поступающей на исполнительные гидроцилиндры, установленные на выходе гидрораспределителей, и силовую гидравлическую установку 19.
Устройство регулирования 11 параметров приводов гидроцилиндров образуют регулятор 20 положения вышки по крену, регулятор 21 положения вышки по тангажу, входы 22 регуляторов, регулятор 23
J-
оо со
Ј 00 ГчЭ
расхода рабочей жидкости, поступающей на исполнительный гидроцилиндр 1, регулятор 24 расхода, регуляторы 25 и 26 расхода, блоки 27-32 сравнения и блок 33 контроля работоспособности системы регули- ровапия, содержащий сумматор 34, компаратор 35 и согласующий усилитель 36. .
Регуляторы 20 и 21 выполнены пропорциональными и содержат бесконтактный управляемый коммутатор 37, усилитель 38 и ограничитель 39. Регуляторы 23-26 яв- ляются ПИ-регуляторами.
Система стабилизации вышки работает следующим образом.
Вследствие действия силы тяжести продольная ось монтируемого трубопровода имеет вертикальное, параллельное общему полю гравитации, направление. Для стабилизации вышки в вертикальном положении в условиях качки судна на волне необходимо придать вышке определенные уг
лы крена и тангажа относительно суд
на, численно равные углам крена и дифферента судна, но противоположного направления. Судовая гировертикаль 6 вырабатывает сигналы (фиг. 1), пропорциональные углам крена и дифферента судна. Эти сиг- налы поступают на блок 9, в котором происходит учет корректирующих сигналов поступающих с блока 10 ручной коррекции от управляющего воздействия оператора. Скорректированные сигналы в качестве задания пространственного положения вышки относительно судна поступают в устройство регулирования 11, где сравниваются в блоках 27 и 28 (фиг. 2) с сигналами обратной связи, поступающими с датчиков 12 и 13. Сигналы датчиков 12 и 13 пропорциональны -действительному крену и тангажу вышки относительно судна. Разностные сигналы с выходов блоков 27 и 28 па регуляторы 20 и 21 положения. Структура устройства регулирования выполнена по принципу построения систем подчиненного регулирования, т. е. выход- ные напряжения регуляторов 20 и 21 являются заданием на расход рабочей жидкости , поступающей на исполнительные гидроцилиндры. Кинематика привода наклона вышки требует воздействия на осно- вание вышки всех четырех гидроцилиндров одновременно, поэтому выходное напряжение каждого регулятора положения разводится на все четыре подчиненные контуры регулирования расхода. При этом напряжение с выхода регулятора положения 20 подается на входы регуляторов 23 и 26 расхода через прямые входы блоков 29 и 32 сравнения, а на входы регуляторов 24 и 25 расхода - через инвертирующие входы блоков 30 и 31 сравнения. Напряжение с выхода регулятора 21 положения посту- нает на входы регуляторов 24 и 26 расхода через прямые входы блоков 30 и 32 сравнения, а на входы регуляторов 23 и 25
5
0
5 0 5 0 г 0
расхода - через инвертирующие- входы блоков 29 и 31 сравнения.
Сигналы обратной связи, пропорциональные расходам рабочей жидкости, подаваемой на исполнительные гидроцилиндры 1 - 4, подаются соответствующими датчиками 15-18 расхода на блоки 29, 30, 31 и 32 сравнения, в которых алгебраически суммируются с задающими сигналами. Результирующие сигналы поступают на регуляторы расхода 23-26, выходные сигналы которых поступают на гидрораспределители. Через распределители рабочая жидкость от силовой гидравлической установки 19 поступает на исполнительные гидроцилиндры. Суммарное действие штоков гидроцилиндров 1-4 приводит к наклону вышки относительно плоскости . палубы судна на требуемые утлы крена и тангажа, при отработке которых выходные сигналы регуляторов 20 и 21 положения уменьшаются до нуля, и внутренние контуры регулирования расхода с регуляторами 23-26 отрабатывают прекращение подачи рабочей жидкости на исполнительные гидроцилиндры.
В процессе работы алгебраическая сумма управляющих напряжений регуляторов расхода 23-26 должна быть равна нулю, что обусловлено кинематикой механизма воз- дейсвия штоков исполнительных гидроцилиндров на основание вышки. В случае неравенства нулю указанной алгебраической суммы воздействие штоков гидроцилиндров на основание вышки не согласовано, что может привести к деформации и разрушению вышки и механооборудо- вания. Точка О (фиг. 1) при наклонах вышки по крену и тангажу должна сохранять неизменным свое пространственное положение. Поэтому в схему введен блок 33 контроля работоспособности устройства 11 регулирования (фиг. 2). Блок 33 формирует сигнал неисправности устройства регулирования и сигналы шунтирования регуляторов 20 и 21 положения в случае превышения алгебраической суммы сигналов регуляторов расхода 23-26 определенной величины уставки. В этом случае на выходе компаратора появляется сигнал, который после усиления .используется для шунтирования регуляторов 20 и 21 путем закорачивания цепей в обратной связи усилителей регуляторов. Свечение светодиода при этом сигнализирует о неисправности устройства регулирования.
Уставка компаратора выбирается исходя из удвоенной максимальной погрешности измерения расхода датчиками 15-18 расхода. Величина уставки ограничителя 39 регуляторов 20 и 21 выбирается исходя из допустимого ускорения пространственного смещения механической конструкции вышки.
Формула изобретения
блок сравнения и регулятор положения вышки по тангажу, а также блок контроля работоспособности устройства регулирования и четыре цепи, каждая из которых содержит последовательно соединенные третий блок сравнения л регулятор расхода, причем вы.ходы регуляторов расхода подключены к соответствующим входам блока контроля работоспособности устройства регулирования, соединенного выходом с стоСистема стабилизации вышки глубоководного добычного комплекса, содержащая блок формирования задающих сигналов, входы которого подключены к соответствующим выходам судовой гидровертикали и блока ручной коррекции, а выходы - к соответствующим первым входам устройства регулирования, соединенного вторыми входами соответственно с выходом дат- 10 рыми входами регуляторов положения выш- чика крена и с выходом датчика танга-ки по крену и тангажу, первые входы г.ер- жа, силовую гидравлическую установку свого и второго блоков сравнения связа- блоком гидрораспределителей, входы кото-ны с соответствующими вторыми входами рого подключены к соответствующим вы-устройства регулирования, а вторые входы - ходам устройства регулирования, а выхо- ., с соответствующими первыми входами уст- ды - к входам соответствующих приво-ройства регулирования,выход регулятора подов гидроцилиндров, отличающаяся тем, что,ложения вышки по крену подключен к лер- с целью повышения качества регулирова-вым входам третьих блоков сравнения, ния, система содержит датчики расходавыход регулятора положения вышки по тан- рабочей жидкости, установленные на выхо-гажу соединен с вторыми входами третьих де гидрораспределителей, а устройство ре- 20 блоков сравнения, третьи входы которых гулирования включает в себя последова-связаны с соответствующими третьими вхо- тельно соединенные первый блок срав-дами устройства регулирования, подключен- нения и регулятор положения вышки поными к выходам соответствующих датчи- крену, последовательно соединенные второйков расхода рабочей жидкости.
блок сравнения и регулятор положения вышки по тангажу, а также блок контроля работоспособности устройства регулирования и четыре цепи, каждая из которых содержит последовательно соединенные третий блок сравнения л регулятор расхода, причем вы.ходы регуляторов расхода подключены к соответствующим входам блока контроля работоспособности устройства регулирования, соединенного выходом с сторыми входами регуляторов положения выш- ки по крену и тангажу, первые входы г.ер- вого и второго блоков сравнения связа- ны с соответствующими вторыми входами устройства регулирования, а вторые входы - с соответствующими первыми входами уст- ройства регулирования,выход регулятора поожения вышки по крену подключен к лер- вым входам третьих блоков сравнения, выход регулятора положения вышки по тан- ажу соединен с вторыми входами третьих локов сравнения, третьи входы которых вязаны с соответствующими третьими вхо- ами устройства регулирования, подключен- ыми к выходам соответствующих датчи- ов расхода рабочей жидкости.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2504815C2 |
| Способ и система швартовки судна | 2020 |
|
RU2747521C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПЛАТФОРМЕННОЙ ГИРОВЕРТИКАЛЬЮ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2574379C1 |
| Активная подвеска корпуса транспортного средства | 1973 |
|
SU598780A1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| Устройство управления креновой рамой курсовертикали | 2022 |
|
RU2796075C1 |
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2014 |
|
RU2553712C1 |
| Способ управления пространственной ориентацией космического аппарата и система управления для его реализации | 2016 |
|
RU2618856C1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |


Изобретение относится к системам регулирования пространственного положения вышки по крену и тангажу. Цель изобретения - повышение качества регулирования. Для достижения цели система содержит судовую гировертикаль, блок ручной коррекции, блок формирования задающих сигналов, устройство регулирования, блок гидрораспределителей и четыре исполнительных привода гидроцилиндров, датчики крена и тангажа и датчики расхода, установленные на выходе гидрораспределителей. 2 ил.
Фиг. 1
| Патент США № 4200054, кл | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
