Изобретение относится к гироскопической технике и может быть применено для управления креновой рамой индикаторной курсовертикали, построенной на базе гировертикали и гирополукомпаса.
Известно устройство управления креновой рамой (дополнительной рамой) дистанционного авиагоризонта АГД-1 (Михайлов О.И., Козлов И.М., Гергель Ф.С. Авиационные приборы. М.: Машиностроение, 1977), состоящее из креновой рамы, с которой кинематически связан двигатель-генератор и датчик угла крена. При этом гировертикаль, имеющая системы продольной и поперечной коррекций, наружной рамой установлена в креновую раму. Для управления креновой рамой на двигатель двигателя-генератора через усилитель подключен индукционный датчик угла, кинематически связанный с осью подвеса внутренней рамки гировертикали.
Недостатком такой схемы управления является неустойчивая работа креновой рамы при углах тангажа 

Известна курсовертикаль КВ-2Н (Система курсовертикали типа СКВ-2Н. Руководство по эксплуатации и техническому обслуживанию. М.: Машиностроение, 1975), взятая за прототип. Устройство управления креновой рамой курсовертикали содержит гировертикаль с системами продольной и поперечной коррекций и индукционным датчиком угла, установленным на оси подвеса внутренней рамы, при этом наружная рама, на оси подвеса которой закреплен датчик угла тангажа (сельсин-датчик), кинематически установлена в креновую раму, с осью подвеса которой кинематически соединены датчик угла крена (сельсин-датчик) и первый двигатель отработки, вход которого электрически соединен с выходом первого усилителя, гирополукомпас (узел курса) с системой горизонтальной коррекции, наружной рамой, на оси подвеса которой закреплен датчик угла курса (сельсин-датчик курса), кинематически установлен в тангажную раму, на оси подвеса которой, расположенной перпендикулярно оси подвеса креновой рамы, установлены приемник угла тангажа, электрически соединенный с датчиком угла тангажа, и второй двигатель отработки, подключенный к выходу второго усилителя, вход которого соединен с выходом приемника угла тангажа, а также регулятор креновой рамы, который представляет электромеханическое вычислительное устройство, состоящее из механизма согласования курса, который содержит сельсин-приемник курса, усилитель, двигатель-генератор, электромагнитную муфту и реле, и механизма согласования тангажа, состоящего из сельсина-приемника тангажа, усилителя, двигателя-генератора, сельсина-датчика и коммутаторов в виде реле. Механизмы согласования курса и тангажа представляют следящие системы, при этом при углах тангажа лежащих в диапазонах 

если же угол тангажа не принадлежит указанному диапазону, то управление первым двигателем отработки будет происходить по сигналу индукционного датчика, минуя регулятор рамы

где 






Зависимость 


Кроме того, все переключения осуществляет группа реле по сигналам контактных датчиков, расположенных на оси наружной рамы гировертикали, которые формируют граничные значения углов тангажа.
Недостатком прототипа является громоздкая конструктивная реализация регулятора рамы, а именно механизмов согласования курса и тангажа, а также пониженная точность формирования управляющего напряжения двигателем отработки креновой рамы, что свойственно аналоговым электро-механическим вычислителям, а это, в конечном счете, приведет к повышенным погрешностям в измерении угла крена при траекториях полета с углами тангажа близкими к 
Технический результат, на достижение которого направлено заявленное изобретение, заключается в упрощении устройства управления креновой рамой курсовертикали и в повышении точности работы при неограниченных углах тангажа.
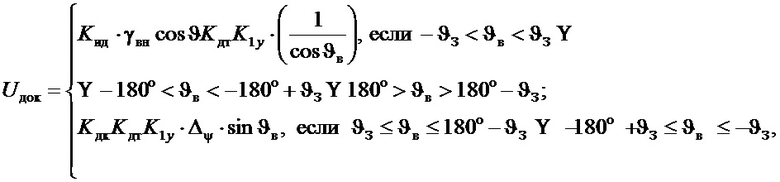
Технический результат достигается тем, что в устройстве управления креновой рамой курсовертикали, содержащем гировертикаль с системами продольной и поперечной коррекций и индуктивным датчиком угла, установленным на оси подвеса внутренней рамы, при этом наружная рама, на оси подвеса которой закреплен датчик угла тангажа, кинематически установлена в креновую раму, с осью подвеса которой кинематически соединены датчик угла крена и первый двигатель отработки, вход которого электрически соединен с выходом первого усилителя, гирополукомпас с системой горизонтальной коррекции, на оси подвеса наружной рамы которого закреплен датчик угла курса, кинематически установлен в тангажную раму, на оси подвеса которой, расположенной перпендикулярно оси подвеса креновой рамы, установлены приемник угла тангажа, электрически соединенный с датчиком угла тангажа, и второй двигатель отработки, подключенный к выходу второго усилителя, вход которого соединен с выходом приемника угла тангажа, а также регулятор креновой рамы, новым является то, что регулятор рамы выполнен в виде микроконтроллера, выходной порт которого через преобразователь код-аналог соединен с входом первого усилителя, а на первый – пятый его входные порты соответственно подключены первый – пятый преобразователи аналог-код, входы которых соединены соответственно с выходами индуктивного датчика, синусной и косинусной обмотками датчика угла тангажа, синусной и косинусной обмотками датчика угла курса, при этом в микроконтроллере формируется напряжение управления первым двигателем отработки в соответствии с формулами 





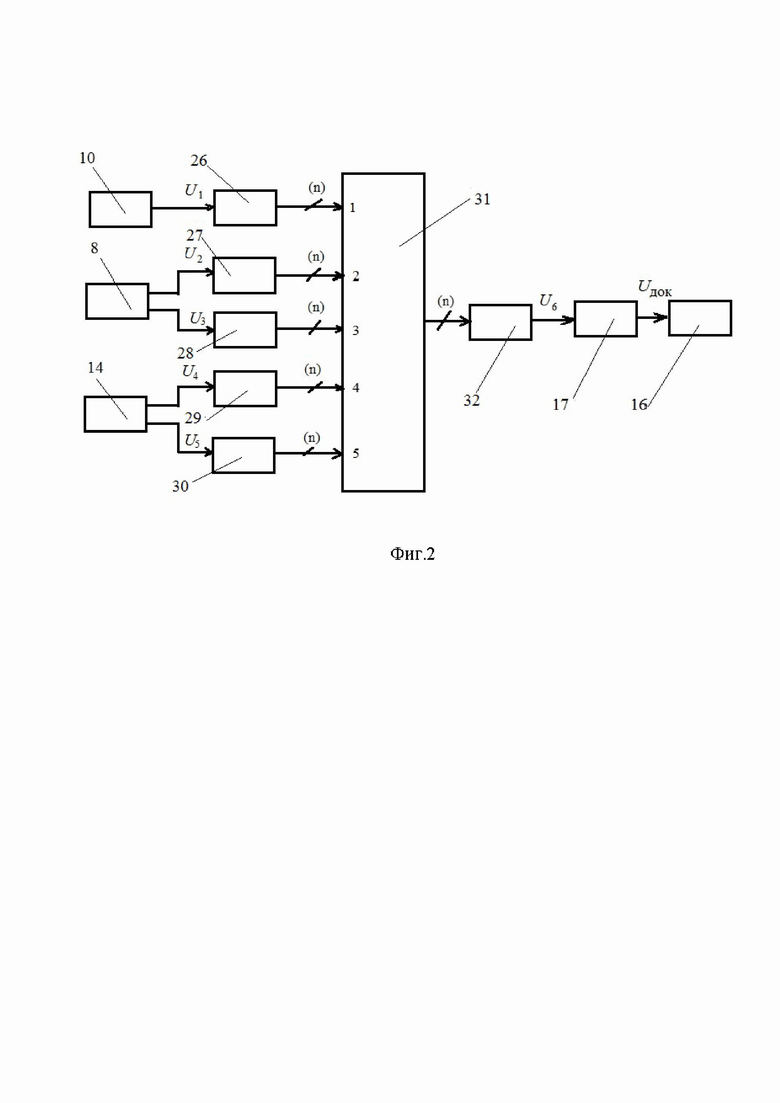
Сущность изобретения поясняется чертежами, приведёнными на фиг.1, фиг.2. При этом на фиг.1 представлена кинематическая схема курсовертикали, содержащая только те функциональные узлы, которые имеют отношение к решаемой задаче. На фиг.2 представлена блок-схема системы управления двигателем отработки креновой рамы. На фиг.1 - фиг.2 приняты следующие обозначения:
1 – гировертикаль (ГВ);
2 – гирополукомпас (ГПК);
3 – креновая рама;
4 – тангажная рама;
5 – гиромотор ГВ;
6 – наружная рама ГВ;
7 – внутренняя рама ГВ;
8 – датчик угла тангажа (синусно-косинусный трансформатор);
9 – датчик угла крена (синусно-косинусный трансформатор);
10 – индуктивный датчик;
11 – гиромотор ГПК;
12 – внутренняя рама ГПК;
13 – наружная рама ГПК;
14 – датчик угла курса (синусно-косинусный трансформатор);
15 – приемник угла тангажа (синусно-косинусный трансформатор);
16 – первый двигатель отработки (двигатель отработки креновой рамы);
17 – первый усилитель;
18 – второй усилитель;
19 – второй двигатель отработки (двигатель отработки тангажной рамы);
20 – датчик жидкостной маятниковый продольной коррекции;
21 – коррекционный мотор продольной коррекции;
22 – датчик жидкостной маятниковый поперечной коррекции;
23 – коррекционный мотор поперечной коррекции;
24 – датчик угла горизонтальной коррекции;
25 – коррекционный мотор горизонтальной коррекции;
26 – первый преобразователь аналог-код;
27 – второй преобразователь аналог-код;
28 – третий преобразователь аналог-код;
29 – четвертый преобразователь аналог-код;
30 – пятый преобразователь аналог-код;
31 – микроконтроллер;
32 – преобразователь код-аналог;
Буквенные обозначения:





















Описание устройства управления креновой рамой курсовертикали.
Устройство управления состоит из некоторых функциональных узлов гироскопического блока фиг.1 и регулятора рамы в виде блок-схемы электронного блока, представленного на фиг.2. При этом на фиг.1а представлен вид на курсовертикаль в плоскости совершения маневра по углу тангажа
Гироскопический блок состоит из гировертикали (узел вертикали) 1, установленной полуосями наружной рамой 6 в креновую раму 3, которая своими полуосями установлена в корпус, и гирополукомпаса 2, установленного полуосями наружной рамы 13 в тангажную раму 4, которая в свою очередь своими полуосями установлена в креновую раму 3. У гировертикали 1 в наружную раму кинематически установлен гироузел, состоящий из внутренней рамки 7 и гиромотора 5, который создает кинетический момент 
Силовое воздействие на креновую раму 3 оказывает первый двигатель отработки 16, подключенный к первому усилителю 17, а его управляющее напряжение 
Напряжения, формируемые датчиками 10; 8 и 14 соответственно равны:





где 


Напряжения 
Работа устройства при выполнении самолетом неограниченных маневров в продольной плоскости.
Для пояснения работы устройства выделим характерные области изменения угла тангажа 
Область 1. 
Область 2.. 
Область 3. 
Область 4. 
В областях 1-2 достаточно использовать для управления первым двигателем сигнал индуктивного датчика 10 с коррекцией на угол тангажа.
В областях 3-4 необходимо произвести переключение управлением первым двигателем с индуктивного датчика 10 на датчик курса 14 с коррекцией на угол тангажа.
В прототипе курсовертикали в КВ-2Н принято, что 
Последовательность работы регулятора рамы, выполненного в виде микроконтроллера, состоит из следующих этапов.
1. Опрос преобразователей аналог-код 26-30, которые формируют n – разрядные коды напряжений 


2. В соответствии с принятой информацией вычисление улов тангажа и курса с применением подпрограммы 

Для пояснения вычисленные значения углов тангажа и курса приведены с нижнем индексом «в».
3. Проверка условий по углу тангажа:
Если угол тангажа находится в первой области, то происходит запоминание угла курса 

Введение множителя 


Если условие первой области не выполняется, то программа переходит к проверке условия второй области. При его выполнении происходит запоминание угла курса 
Если условия первой и второй областей не выполняются, то программа проверяет принадлежность угла тангажа к третьей области. При его выполнении происходит формирование управляющего напряжения первым двигателем отработки 16, которое вычисляется по формуле 
Если условие принадлежности угла тангажа к третьей области не выполняются, то программа проверяет принадлежность угла тангажа к четвертой области. При его выполнении происходит формирование управляющего напряжения первым двигателем отработки 16, которое вычисляется по формуле 
Если условие принадлежности угла тангажа к четвертой области не выполняются, то программа возвращается в начало проверки условий по углу тангажа.
4. В конечном счете, в регистр обмена микроконтроллера будет направлена величина, соответствующая выполнению условий из первой-второй областей или третьей-четвертой, что является окончанием работы программы в течение очередного цикла работы.
5. После завершения очередного цикла работы программа возвращается в начало к первому пункту для организации работы в реальном масштабе времени.
6. Преобразователь код-аналог 32, опрашивая регистр обмена микроконтроллера 31, преобразует цифровой эквивалент в аналоговое напряжение 
По сравнению с прототипом устройство управления креновой рамой курсовертикали будет более компактным, и занимать одну плату, а, следовательно, иметь меньший вес. Цифровой вычислитель на базе микроконтроллера не имеет погрешностей присущих электромеханическим вычислителям, и в частности температурных погрешностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство измерения угла поворота летательного аппарата в горизонтальной плоскости | 2023 |
|
RU2805424C1 |
| Гирополукомпас с компенсацией температурного дрейфа | 2024 |
|
RU2818661C1 |
| Гирополукомпас с аналитической азимутальной коррекцией | 2023 |
|
RU2799738C1 |
| Гирополукомпас | 2024 |
|
RU2826371C1 |
| СИСТЕМА ОРИЕНТАЦИИ | 2003 |
|
RU2239160C1 |
| Устройство управления стабилизирующими моторами курсовертикали | 2022 |
|
RU2787311C1 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| БЛОК КОНТРОЛЯ ДВУХ КУРСОВЕРТИКАЛЕЙ | 2002 |
|
RU2227934C2 |
| Способ измерения угла поворота летательного аппарата в горизонтальной плоскости | 2023 |
|
RU2805425C1 |
| СПОСОБ КОНТРОЛЯ ДАТЧИКОВ СИСТЕМЫ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2664128C1 |

Устройство управления креновой рамой курсовертикали содержит гировертикаль с системами продольной и поперечной коррекций и индуктивным датчиком угла, установленным на оси подвеса внутренней рамы, при этом наружная рама, на оси подвеса которой закреплен датчик угла тангажа, кинематически установлена в креновую раму, с осью подвеса которой кинематически соединены датчик угла крена и первый двигатель отработки, вход которого электрически соединен с выходом первого усилителя, гирополукомпас с системой горизонтальной коррекции, на оси подвеса наружной рамы которого закреплен датчик угла курса, кинематически установлен в тангажную раму, на оси подвеса которой, расположенной перпендикулярно оси подвеса креновой рамы, установлены приемник угла тангажа, электрически соединенный с датчиком угла тангажа, и второй двигатель отработки, подключенный к выходу второго усилителя, вход которого соединен с выходом приемника угла тангажа, а также регулятор креновой рамы, выполненный определенным образом. Обеспечивается повышение точности работы при неограниченных углах тангажа. 2 ил.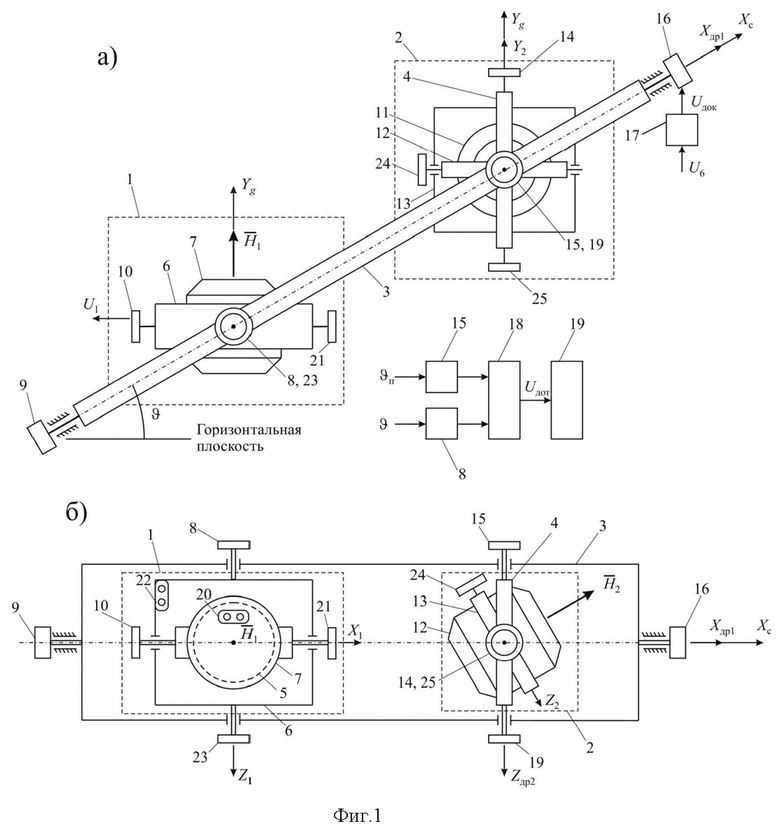
Устройство управления креновой рамой курсовертикали, содержащее гировертикаль с системами продольной и поперечной коррекций и индуктивным датчиком угла, установленным на оси подвеса внутренней рамы, при этом наружная рама, на оси подвеса которой закреплен датчик угла тангажа, кинематически установлена в креновую раму, с осью подвеса которой кинематически соединены датчик угла крена и первый двигатель отработки, вход которого электрически соединен с выходом первого усилителя, гирополукомпас с системой горизонтальной коррекции, на оси подвеса наружной рамы которого закреплен датчик угла курса, кинематически установлен в тангажную раму, на оси подвеса которой, расположенной перпендикулярно оси подвеса креновой рамы, установлены приемник угла тангажа, электрически соединенный с датчиком угла тангажа, и второй двигатель отработки, подключенный к выходу второго усилителя, вход которого соединен с выходом приемника угла тангажа, а также регулятор креновой рамы, отличающееся тем, что регулятор рамы выполнен в виде микроконтроллера, выходной порт которого через преобразователь код-аналог соединен с входом первого усилителя, а на первый–пятый его входные порты соответственно подключены первый–пятый преобразователи аналог-код, входы которых соединены соответственно с выходами индуктивного датчика, синусной и косинусной обмотками датчика угла тангажа, синусной и косинусной обмотками датчика угла курса, при этом в микроконтроллере формируется напряжение управления первым двигателем отработки в соответствии с формулами






| СПОСОБ УПРАВЛЕНИЯ БЕСПЛАТФОРМЕННОЙ ГИРОВЕРТИКАЛЬЮ С РАДИАЛЬНОЙ КОРРЕКЦИЕЙ И БЕСПЛАТФОРМЕННАЯ ГИРОВЕРТИКАЛЬ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2659970C1 |
| УСТРОЙСТВО КОРРЕКЦИИ ГИРОВЕРТИКАЛИ | 1998 |
|
RU2145057C1 |
| СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2186339C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СИСТЕМЫ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2265876C1 |
| EP 258085 A2, 02.03.1988. | |||

