Изобретение относится к обработке металлов давлением, в частности к кромкргибочному оборудованию-.
Цель изобретения - расширение технологических возможностей.
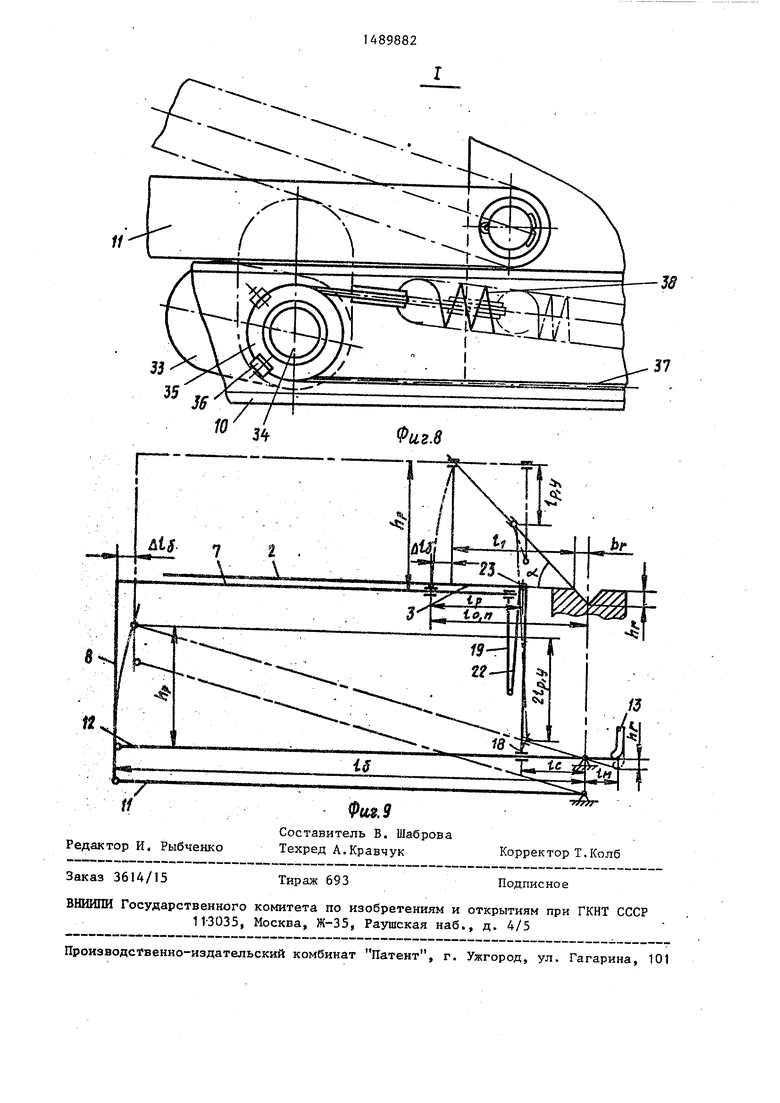
На фиг. 1 представлено устройство общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1| на фиг. 4 - разрез В-В на (1)иг. 1; на фиг. 5 - разрез Г-Г на фиг. 1; на фиг. 6 - разрез Д-Д на фиг.| на фиг. 7 - разрез Е-Е на .фиг. 1; на фиг. В - узел I на фиг. 1; на фиг. 9 - расчетная схема.
Поддерживающее устройство состоит из поддержки и механизма плавного опускания заготовок в процессе обработки Ло ержка выполнена в виде трубчатого элемента 1, на котором жестко закреплены поддерживающие 2 и поворотные 3 кронштейны . Вал 4 смонтирсван внутри трубчатого элемента 1 и своими концами шарнирно закреплен посредством опор 5 с возможностью перемещения и фиксации стопорами б на горизонтальных частях 7 двух Г-образных стоек 8, каждая из которых закреплена на вертикальных частях- 9 основания 10 посредством двух параллельно расположенных нижнего 1 1 и верхнего 12 рычагов.
Верхний двуплечий рычаг 12 своим малым плечом контактирует с толкателем 13, смонтированным на вертикальной части 9 основания 10 в направля- юпщх хомутах 14 с возможностью ограниченного вертикального перемещении вниз под действием упора 15, когорьй
5
неподвижно закреплен на пуансоне 6 пресса 17. На большем плече верхнего рычага 12 установлена проуиина 18, а на горизонтальной части 7 Г-образ- ной стойки 8 смонтирована скоба 19, имеющие возможность перемещения и фиксации стопорами 20 и 21.
На проушине 18 и скобе 19 закреп- 0 лены концы тяги 22, а ее средняя гибкая часть перекинута через ролик .23, закрепленньй на поворотном кронштейне 3 поддержки с возможностью перемещения по нему и фиксации относительно него крепежом 24. На валу 4 жестко закреплены маховичок 25 и зубчатые колеса 26, которые взаимодействуют с рейками 27, закрепленными на горизонтальных частях 7 Г-образных стоек 8. Кроме того, на горизонтальной части 7 Г-образных стоек 8 закреплена линейка 28, по которой указателем 29, смонтированным на опоре 5, определяется расстояние между осью поворота поддержки и серединой гнезда 30 матрицы 31. На верхней поверхности поворотного кронштейна 3 закреплена линейка 32, предназначенная д,пя определения расстояния медцу осью поворота поддержки и осью ролика 23.
Механизм плавного опускания заготовок в процессе обработки включает в себя эксцентрик 33, смонтированный на валике 34 с возможностью совместного с ним поворота, контактирующий с
нижним рычагом 11, и закрепленный на конце валика 34 шкив 35. На шкиве 35 своей средней частью закреплена посредством планки 36 гибкая тяга 37,
5
0
5
0
5
один конец которой с помощью пружины 38 соединен с основанием 10, а другой конец, огибающий ролик 39, - с упором .15.
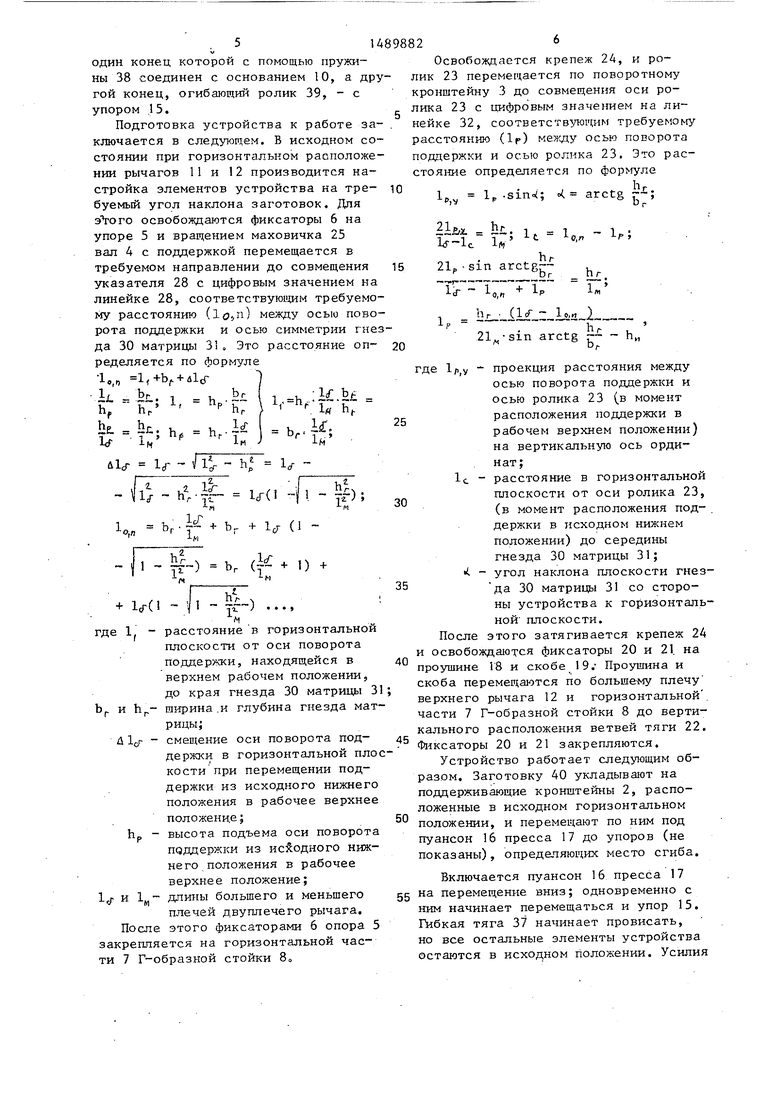
Подготовка устройства к работе заключается в следующем. В исходном состоянии при горизонтальном расположении рычагов 11 и 12 производится настройка элементов устройства на тре- буемый угол наклона заготовок. Для освобождаются фиксаторы 6 на упоре 5 и вращением маховичка 25 вал 4 с поддержкой перемещается в требуемом направлении до совмещения указателя 28 с цифровым значением на линейке 28, соответствуюидам требуемому расстоянию (l(j,,n) между осью поворота поддержки и осью симметрии гнезда 30 матрицы Это расстояние оп- ределяется по формуле 1о,„ + й1сГ
1 ь :l.b
-L 4 i 1 Г
ь.
1«
i. 1й
ли V - п К 1
40
плоскости от оси поворота поддержки, находящейся в верхнем рабочем положении, до края гнезда 30 матрицы 31; и ширина.и глубина гнезда матрицы;
1сг - смещение оси поворота под- 45 держки в горизонтальной плоскости при перемещении поддержки из исходного нижнего положения в рабочее верхнее положение;
hp - высота подъема оси поворота поддержки из исходного нижнего положения в рабочее верхнее положение; и 1, длины большего и меньшего плечей двугшечего рычага. После этого фиксаторами 6 опора 5 репляется на горизонтальной час7 Г-образной стойки 8
50
55
Освобождается крепеж 24, и ролик 23 перемегцается по поворотному кронштейну 3 до совмещения оси ролика 23 с цифровым значением на линейке 32, соответствующим требуемому расстоянию (1р) мелзду осью поворота поддержки и осью ролика 23, Это расстояние определяется по
IP arctg
l.. 1 .
1 J-cT ic J-iV
21p - sin arctg™
IcT ..« + 1
0,4
«Ji- ll - bu i
21
hr
sin arctg -
- ht
где - проекция расстояния между осью поворота поддержки и осью ролика 23 (в момент расположения поддержки в рабочем верхнем положении) на вертикальную ось ординат;
1с - расстояние в горизонтальной плоскости от оси ролика 23, (в момент расположения под- . держки в исходном нижнем положении) до середины гнезда 30 матрицы 31; i. - угол наклона плоскости гнезда 30 матрицы 31 со стороны устройства к горизонтальной плоскости.
После этого затягивается крепеж 24 и освобождаются фиксаторы 20 и 21. на проушине 18 и скобе 19. Проушина и скоба перемещаются по больщему плечу верхнего рычага 12 и горизонтальной , части 7 Г-образной стойки 8 до вертикального расположения ветвей тяги 22. Фиксаторы 20 и 21 закрепляются.
Устройство работает следующим образом. Заготовку 40 укладывают на поддерживающие кронщтейны 2, расположенные в исходном горизонтальном положении, и перемещают по ним под пуансон 16 пресса 17 до упоров (не показаны), определяющих место сгиба.
Включается пуансон 16 пресса 17 на перемещение вниз; одновременно с ним начинает перемещаться и упор 15. Гибкая тяга 37 начинает провисать, но все остальные элементы устройства остаются в исходном положении. Усилия
10
15
11489882
пружины 38 недостаточно, чтобы повернуть шкив 35 с валиком 34 и эксцентриком 33 и переместить нижний рычаг I1 вверх.
Одновременно с касанием пуансоном 16 заготовки 40 происходит каса- ние упором 15 толкателя 13 При сгибании заготовки 40 под действием пуансона 16 происходит одновременное перемещение вниз толкателя 13 под действием упора 15. Толкатель поворачивает верхний рычаг 12 и поднимает Г-образную стойку 8. Вместе со стойкой поднимаются опоры 5, вал 4 и трубчатьй элемент 1, которьй одновременно поворачиваемся под действием тяги 22 и поворотного кронштей- на 3, При этом тяга 22 с роликом 23 работает как известная талевая подвеска, т.е. перемещение ролика 23 на какое-либо расстояние происходит за удвоенное перемещение конца тяги 22.
Поддерживающими кронштейнами 2 заготовка 40 наклоняется в сторону пресса. Одновременно с поворотом верхнего 12 и нижнего II рычагов повора- чивается эксцентрик 33 под действием пружины 38 и выбирает слабину гибкой тяги 37 между роликом. 39 и упором 15 В момент окончания гибки пуансон 16 и все элементы устройства останавливаются D
20 11
30 л
25
Заготовка поддерживается в наклон- 35 и зубчатые колеса установлены на в а3
0
5
носительно оси симметрии матрицы, две Г-Ьбразные стойки, два параллельно расположенных один над другим.рычага, верхний из которых выполнен двуплечим, толкательs установленньй с возможностью взаимодействия с меньшим плечом верхнего рычага, упор, закрепленньй на пуансоне пресса с возможностью взаимодействия с толкателем, тягу, связанную с поддержкой и двуплечим рычагбм, механизм плавного опускания заготовок, выполненный в виде эксцентрика, закрепленного на двугше- чем рычаге и связанного с основанием посредством пружины и гибкой тяги, закрепленной на упоре, отличающееся тем, что, с целью расширения.технологических возмож0 11Ьстей, оно снабжено узлами регулирования расстояния и угла наклона поддержки относительно матрицы.
2. Устройство по п. 1, о т л и чающееся тем, чТо узел регулирования расстояния поддержки относительно матрицы выполнен в ваде установленного концентрично с валом трубчатого элемента, маховичка, зуб- чатьк колес, реек, линеек и указате0 ля, при этом вал установлен в опорах и шарнирно закреплен на г оризонталь- ных частях Г-образных стоек с возможностью поступательного перемещения относительно матрицы, маховичок.
5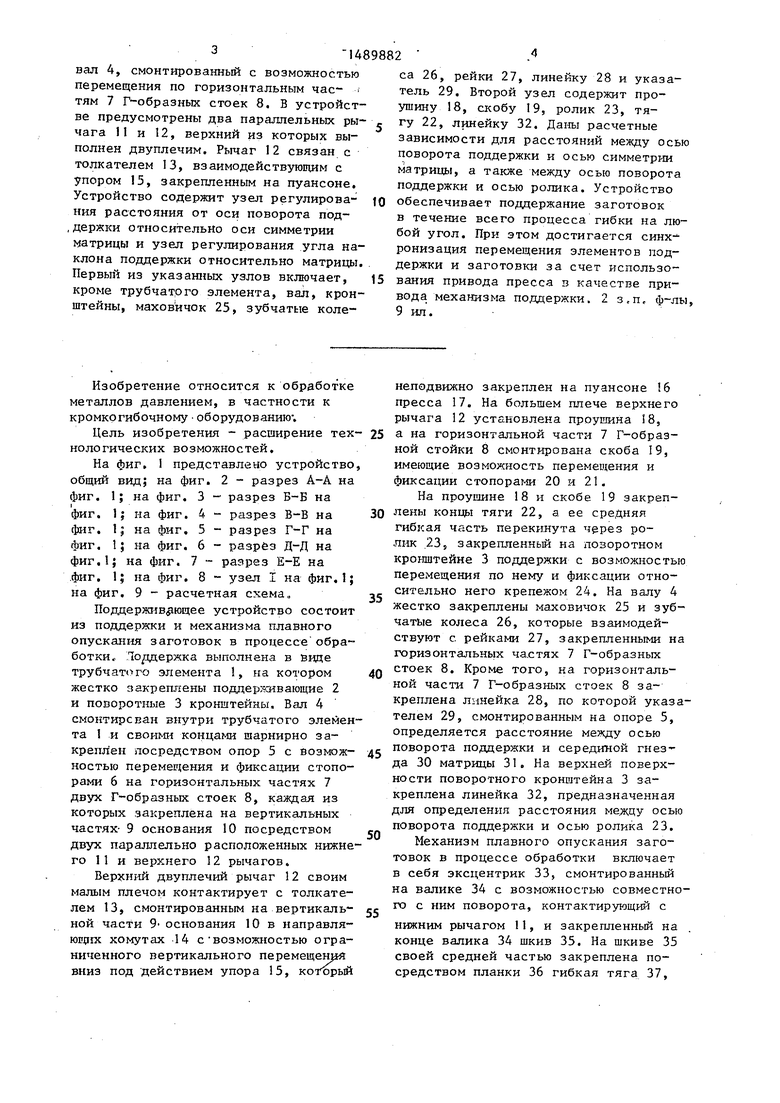
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ДЕРЕВЯННЫХ ШПАЛ | 1992 |
|
RU2075567C1 |
| Автомат для изготовления проволочных граблин | 1980 |
|
SU925493A1 |
| Устройство для поддержания заготовок в процессе обработки | 1986 |
|
SU1338923A1 |
| Устройство для гибки | 1986 |
|
SU1324712A1 |
| Устройство к прессу для перемещения обрабатываемых деталей | 1982 |
|
SU1063515A1 |
| Устройство для монтажа радиоэлементов на печатных платах | 1985 |
|
SU1363545A1 |
| Демпфер для подающей каретки штампа | 2020 |
|
RU2756457C1 |
| Устройство для калибровки трубчатых заготовок | 1983 |
|
SU1131578A1 |
| Скобосшивной станок для соединения деревянных поддонов | 1974 |
|
SU516523A1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ИЗДЕЛИЙ ИЗ ПОЛОСОВОГО ШПОНА | 1995 |
|
RU2064862C1 |



Изобретение относится к обработке металлов давлением,в частности к кромкогибочному оборудованию.Цель изобретения - расширение технологических возможностей. Устройство содержит поддержку, выполненную в виде трубчатого элемента 1, поддерживающего 2 и поворотного 3 кронштейнов. Внутри трубчатого элемента установлен вал 4, смонтированный с возможностью перемещения по горизонтальным частям 7 Г-образных стоек 8. В устройстве предусмотрены два параллельных рычага 11 и 12, верхний из которых выполнен двуплечим.Рычаг 12 связан с толкателем 13, взаимодействующим с упором 15, закрепленным на пуансоне. Устройство содержит узел регулирования расстояния от оси поворота поддержки относительно оси симметрии матрицы и узел регулирования угла наклона поддержки относительно матрицы. Первый из указанных узлов включает,кроме трубчатого элемента, вал, кронштейны, маховичок 25, зубчатые колеса 26, рейки 27,линейку 28 и указатель 29.Второй узел содержит проушину 18,скобу 19,ролик 23,тягу 22,линейку 32.Даны расчетные зависимости для расстояний между осью поворота поддержки и осью симметрии матриц,а также между осью поворота поддержки и осью ролика.Устройство обеспечивает поддержание заготовок в течение всего процесса гибки на любой угол. При этом достигается синхронизация перемещения элементов поддержки и заготовки за счет использования привода пресса в качестве привода механизма поддержки. 2 з.п. ф-лы, 9 ил.
ном положении лоддерживающими кронштейнами 2. При перемещении пуансона 16 вверх упор 15 освобождает тол катель 13 и плавно тянет гибкую тягу 37, которая поворачивает эксцент- 40 ствия с зубчатыми колесами, указатель
рик 33, чем способствует плавному повороту нижнего рычага 11 вниз и, следовательно, плавному опусканию заготовки 40 из наклонного положения в горизонтальное.
В момент остановки пуансона 16 в верхнем положении процесс возврата заготовки 40 в горизонтальное положение заканчивается. Заготовку снимают с поддерживающих кронштейнов 2.
Формула изобретения
-eih
v(K+1)
Id- (1
0
-1,-Н-,,
г Де l,
расстояние от оси поворота поддержки до оси симметрии матрицы;
ширина и глубина гнезда матрицы;
длина большего и меньшего плечей двуплечего рычага, 3. Устройство по пп. 1 и 2, о т - личающееся тем, что узел
и Ь,
V «
регулирования угла наклона поддержки относительно матриць выполнен в виде установленной на большем плече двуплечего -рычага проушины, скобы, раз- мещенной на горизонтальной части одной из Г-образных стоек, тяги, закрепленной концами на скобе и проушине, огибаемого тягой ролика и линейки, установленных на одном из кронштей- Ю нов, смонтированном с возможностью регулирования угла наклона относительно матрицы, причем ролик установлен на кронштейне с возможностью поступательного перемещения вдоль него, ось 15
/// ///
ролика расположена относительно оси поворота поддержки на расстоянии
hr- + (1сГ - . IP ,
21„-51п arctg г- - hf
Or
где Ij - расстояние между осью поворота поддержки и осью симметрии матриць;;
&г и bf.- ширина и глубина гнезда
матрицы; If и 1„- длины большего и меньшего
плечей двуплечего рычага.
/ХХ //у f 5li.
Фиг. г
--37 55
ФиеЛ
J
Фие,6
фиг. 5
E-E
Фие. 7
Редактор И. Рыбченко
Составитель В. Шаброва Техред А.Кравчук
Заказ 3614/15
Тираж 693
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 11-3035, Москва, Ж-35, Раушская наб., д. 4/5
Ф(л$,9
Корректор Т,Колб
Подписное
| Авторское свидетельство СССР №,1338923, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
