Изобретение относится к механизации йузнечно-прессового производства, в частности к устройствам к прессу для перемещения обрабатываемых деталей.
Известно устройство для подачи полосового материала в зону штампа, содержащее каретку, кинематически связанную с ползуном пресса и несущую подпружиненный к ней захват в виде крючка, а также механизм подъема и опускания захвата 1.
Известное устройство предназначено только для протягивания полосы захватом за перемычки между вырубленными окнами и не обеспечивает удаления из зоны щтампа щтучных деталей, имеющих круглую форму или асимметричную, из-за воздействия крючка захвата на заготовку только в одной точке, расположенной по продольной оси симметрии штампа.
Известно также устройство к прессу для перемещения обрабатываемых деталей относительно штампового блока, содержащее каретку, установленную на направляющих с возможностью возвратно-поступательного перемещения перпендикулярно направлению движения ползуна пресса и кинематически связанную с ним, соединенный с кареткой захват и средство подъема и опускания захвата в виде копира 2.
Недостаток такого устройства состоит в пониженной надежности его работы и ограниченных технологических возможиостях, что обусловлено особенностями конструктивного выполнения устройства.
Цель изобретения - повыщение надежности и расширение технологических возможностей устройства.
Поставленная цель достигается тем, что в устройстве для перемещения обрабатываемых деталей относительно штампового блока, содержащем каретку, установленную на направляющих с возможностью возвратно-поступательного перемещения перпендикулярно направлению движения ползуна пресса и кинематически связанную с ним, соединенный с кареткой захват и средство подъема и опускания захвата в виде копира, каретка выполнена в виде рамы, снабженной упорами, захват соединен с кареткой щарнирно и снабжен роликами, установлеиными с возможностью взаимодействия с.упорами, а копир выполнен из двух секций, одна из которых закреплена на смонтированиой в мёжштамповом пространстве направляющей, а другая щарнирно установлена на первой.
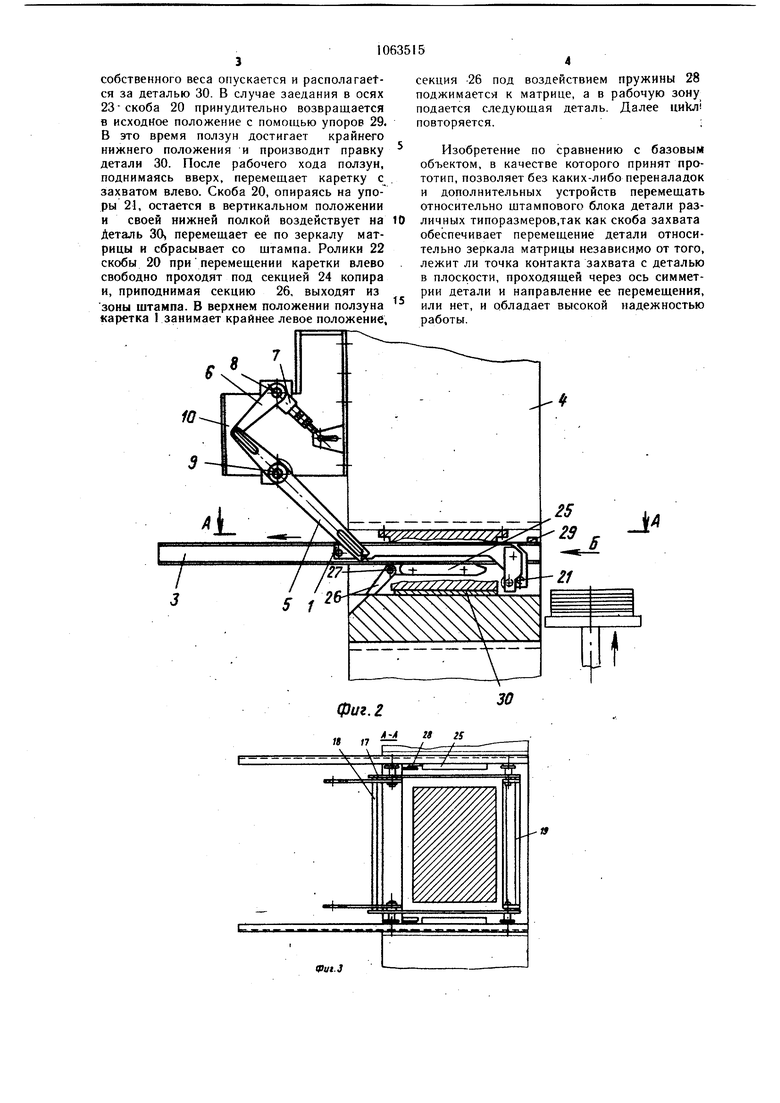
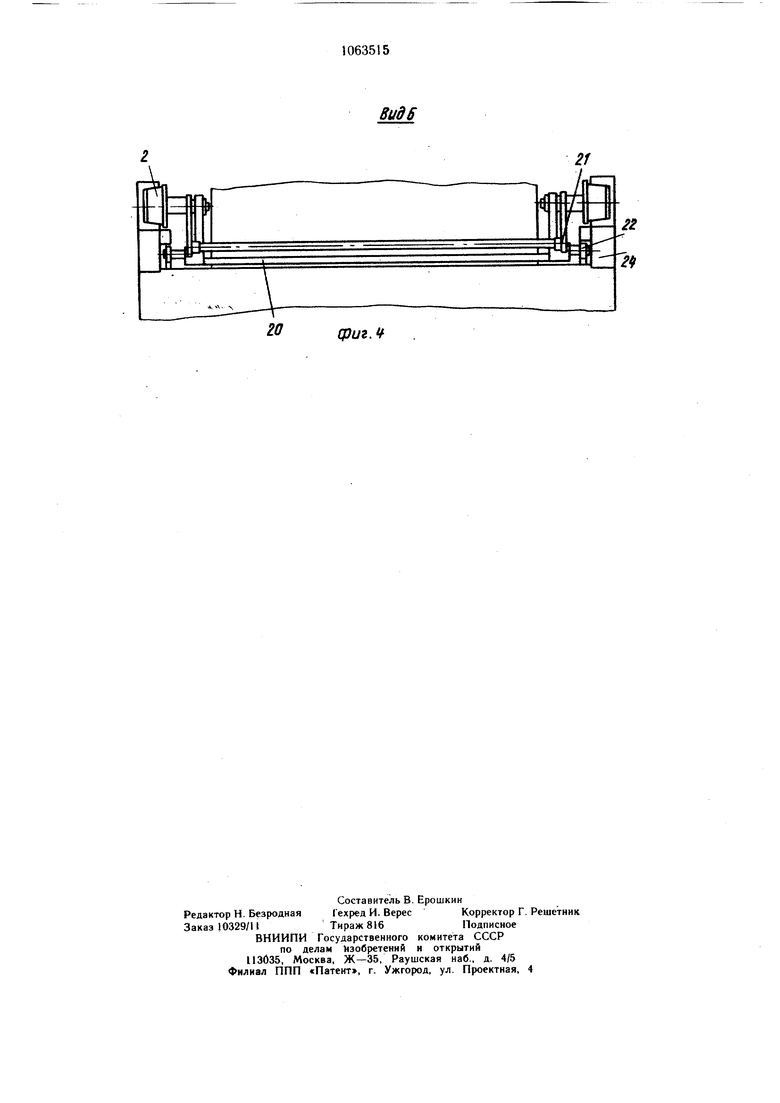
На . 1изображено устройство в исходном положении, общий вид; на фиг. 2 - то же, в рабочем положении; на фиг. 3 - сечение А-А на фиг. 2; на фиг. 4 - вид Б на фиг. 2.
Устройство к прессу для перемещения обрабатываемых, деталей относительно щтам)ювого блока содержит каретку 1, установ ;1енную на роликах 2 в направляющих 3
и кинематически связанную с ползуном пресса 4 посредством двух параллельных двуплечих рычагов 5, соединенных рычагами 6 с тягой 7. Оси 8 и 9 поворота рычагов 5 , и 6 закреплены в корпусе 10, смонтированном на станине пресса, а ось II поворота тяги 7 установлена в продольном пазу кронштейна 12, закрепленного на ползуне пресса. На концах рычагов 5 выполнены продольные пазы, в которых размещены оси 13 и J4, соединяющие ,их соответственно с рычагами 6 и кареткой 1. Направляющие 3 параллельно установлены на матрице 15 на расстоянии, обеспечивающем прохождение пуансона 16. Каретка I выполнена в виде
рамы, образованной двумя параллельными пластинами 17, соединенными тягами 18 и 19, и связана с захватом, выполненным в виде скобы 20, свободно подвешенной на концах пластин 17 и контактирующей с упорами 21, размещенными на концах тя0 ги 19 и ограничивающими поворот скобы. На боковых сторонах скобы закреплены ролики 22. Скоба 20 смонтирована на каретке посредством осей 23 и установлена над матрицей с зазором, не превыщающим
минимальной толщиньг удаляемой детали. Устройство снабжено также средством подъема и опускания захвата, выполненным в виде копира из двух секций, одна из которых (24) закреплена на опоре 25 направляющей 3 и установлена над зеркалом матрицы 15
0 с зазором, обеспечивающим свободное прохождение роликов 22, а вторая (26) щарнирно закреплена на секции 24 с возможностью поворота относительно оси 27 в на. правлении удаления детали. Секция 26 установлена наклон1Ю к, секции 24, размещена
свободным концом на матрице и поджата к ней пружиной 28 кручения.
На направляющих установлен упор 29 для возврата скобы 20 в исходное положение в случае заедания в осях 23.
Устройство работает следующим образом. Деталь 30 каким-либо подающим механизмом подается в зону штампа.В исходном положении ползун 4 пресса с пуансоном 16 находится в крайнем верхнем положении, а каретка I - в крайнем левом (по чертежу).
Ползун 4, опускаясь, через кронщтейн 12 воздействует на ось 11 тяги 7, заставляя ее поворачиваться и скользить в пазу кронщтейна 12. Через ось 8 поворот тяги 7 передается на двуплечие рычаги 5, которые,
Q в свою очередь, поворачиваясь вокруг осей 13 и 14, скользящих в пазах рычагов 5 и 6, воздействуют-на баретку 1, перемещая ее по направляющим вправо. При этом свободно висящая на оси 23 скоба 20 роликами 22 наезжает на опущенную секцию 26, лежа5 щую свободным концом на матрице 15, поднимается по ней на верхнюю полость секции 24 и проходит по ней над деталью 30. Пройдя секцию 24, скоба 20 под действием}
собственного веса опускается и pacпoлaгaetся за деталью 30. В случае заедания в осях 23скоба 20 принудительно возвращается в исходное положер1ие с помощью упоров 29. В это время ползун достигает крайнего нижнего положения и производит правку детали 30. После рабочего хода ползун, поднимаясь вверх, перемещает каретку с захватом влево. Скоба 20, опираясь на упоры 21, остается в вертикальном положении и своей нижней полкой воздействует на Деталь 30 перемещает ее по зеркалу матрицы и сбрасывает со щтампа. Ролики 22 скобы 20 при перемещении каретки влево свободно проходят под секцией 24 копира и, приподнимая секцию 26, выходят из зоны штампа. В верхнем положении ползуна каретка 1 занимает крайнее левое положение.
фиг. 2
секция -26 под воздействием пружины 28 поджимается к матрице, а в рабочую зону подается следующая деталь. Далее циЧл повторяется.;
Изобретение по сравнению с базовым объектом, в качестве которого принят прототип, позволяет без каких-либо переналадок и дополнительных устройств перемещать относительно щтампового блока детали различных типоразмеров,так как скоба захвата обеспечивает перемещение детали относительно зеркала матрицы независимо от того, лежит ли точка контакта захвата с деталью в плоскости, проходящей через ось симметрии детали и направление ее перемещения, или нет, и обладает высокой надежностью работы.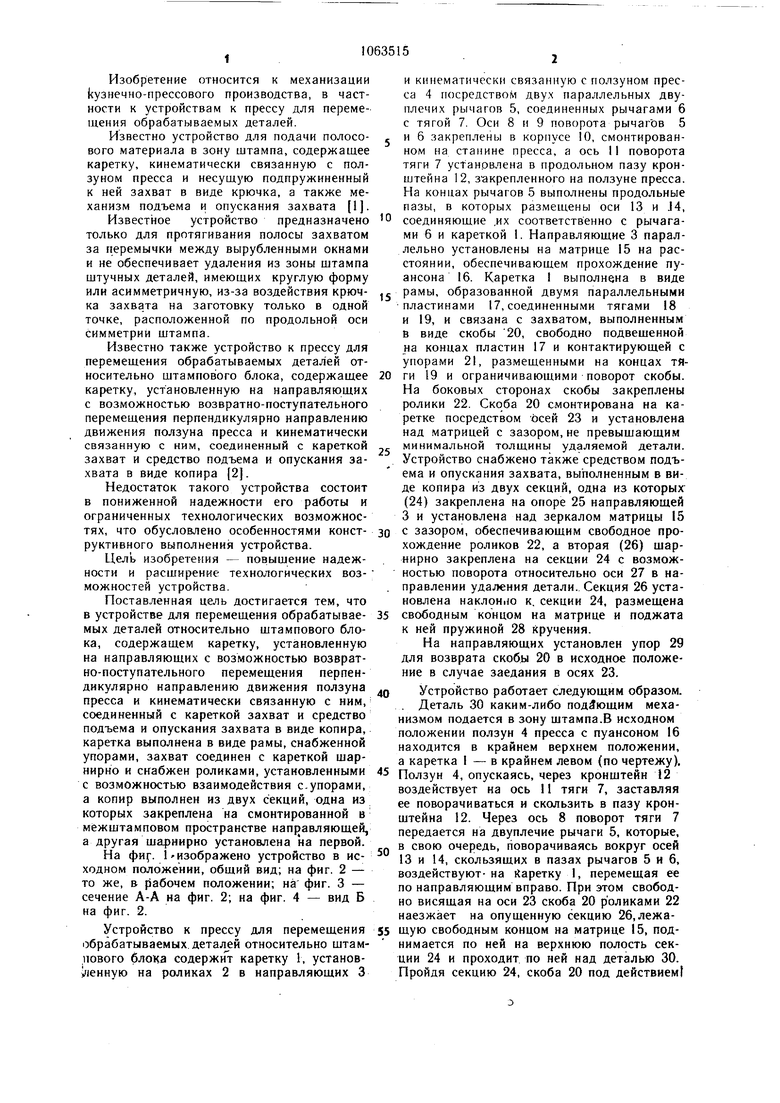
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для удаления деталей и отходов из пресса | 1981 |
|
SU1054101A1 |
| Устройство для подачи штучных заготовок в рабочую зону пресса | 1989 |
|
SU1706764A1 |
| Устройство для изготовления кольцевых деталей трех переходной гибкой | 1979 |
|
SU772656A1 |
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| Устройство для вырубки изделий из резины | 1976 |
|
SU943004A1 |
| Устройство для изготовления деталей из длинномерного материала | 1983 |
|
SU1166868A1 |
| Устройство для обработки давлением и сборки сетчатых деталей,преимущественно секций масляных фильтров | 1983 |
|
SU1094717A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Способ обвязки рулонов на барабанеМОТАлКи и уСТРОйСТВО для ЕгООСущЕСТВлЕНия | 1979 |
|
SU831666A1 |
| Устройство для удаления деталей из зоны обрабатывающей машины | 1986 |
|
SU1362576A1 |
УСТРОЙСТВО К ПРЕССУ ДЛЯ ПЕРЕМЕЩЕНИЯ ОБРАБАТЫВАЕМЫХ ДЕТАЛЕЙ относительно штамповочного блока; содержащее каретку, установленную // 13 на направляющих с возможностью возврат но-поступательного перемещения перпенди кулярно к направлению движения ползуна и кинематически связанную с ним, соединенный, с кареткой захват и средство подъема И опускания захвата в виде копира, отличающееся тем, что, с целью повышения надежности и расщирения технологических возможностей, каретка выполнена в виде рамы, снабженной упорами, захват соединен с кареткой щарнирно и снабжен роликами, установленными с возможностью взаимодействия с упорами, а копир выполнен из двух секций, одна из которых закреплена на смонтированной в межштамповом пространстве направляющей, а другая шарнирно усановлена на первой. (О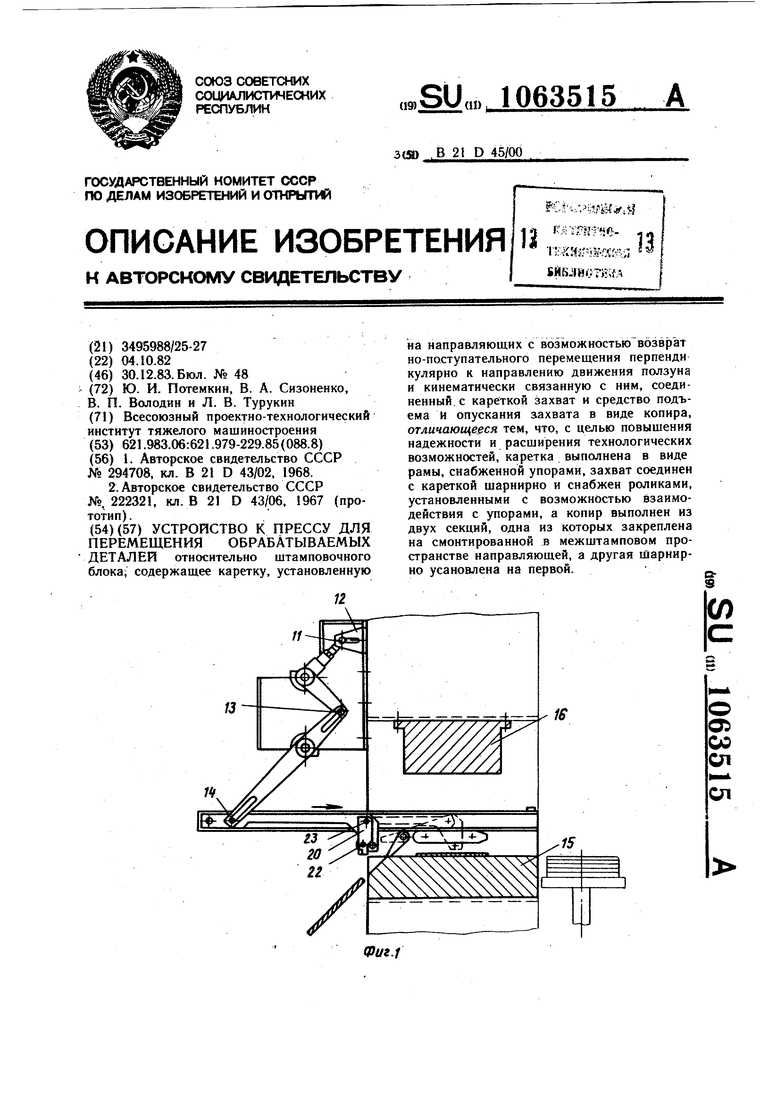
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ПОДАЧИ Л\АТЕРИАЛАВ ШТАМП | 0 |
|
SU294708A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Я. В. Боровинский | 0 |
|
SU222321A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
