5 5
nlf.lLrb:;;iint--| h
п - . .JО--|Т 1, . -.-J
16
СО
05
со
19 15
17 20
Изобретение относится к роботостроению и может быть использовано в различных технологических процессах на операциях сборки и перекладки изделий, конкретно для обслуживания устройства сушки метал- локерамических карт.
Цель изобретения - расширение технологических возможностей за счет увеличения числа рабочих органов при одновременном повышении точности их ПОЗИЦИО-
нирования.
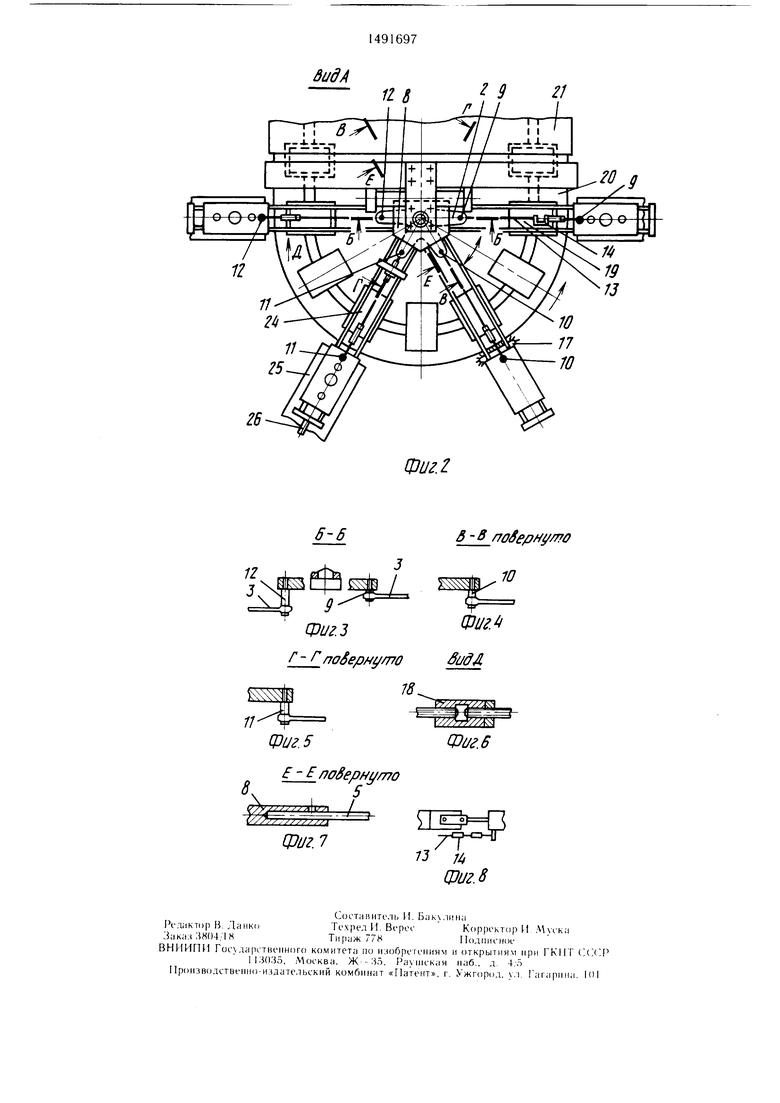
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - разрез В - В на фиг. 2; на фиг. 5 - разрез Г-Г на фиг. 2; на фиг. 6 - вид Д на фиг. 2; на фиг. 7 - разрез Е-Е на фиг. 2; на фиг. 8 - П-образное соединение.
Манипулятор состоит из основания 1, приводного кривошипно-шатунного механизма, основание 1 выполнено в виде П-образ- ной рамы, в верхней части которой размещен кривошип 2, выполненный в виде плоского диска, связанный шатунами 3 с рабочими органами 4, например каретками, перемещающимися по радиальным цилиндрическим направляющим 5, оси симметрии которых проходят через неподвижную ось вращения кривошипа 2.
Кривошип 2 закреплен на шлицевом валу 6, поворачивающем кривошип от поршневого поворотного пневмодвигателя 7 на угол 180° Цилиндрические направляющие 5 запрессованы в плите 8, закрепленной на корпусе пневмодвигателя 7, жестко связанного с основанием 1.
Шатуны 3 шарнирно установлены одними концами на кривошипе 2, а другими - на каретках 4. Разница их установки относительно ниж}1ей плоскости кривошипа 2 по высоте определяется цилиндрическими пальцами 9-12, высота которых увеличивается, например, в направлении против часовой стрелки.
Высота данных пальцев возрастает соответственно на такую величину, которая исключает столкновение шатунов при пересечении их траекторий, с этой же целью на шатуне 13 предусмотрено П-образное соеди- нение 14.
П-образное соединение 14 предназначено для того, чтобы при повороте кривошипа на 180° против часовой стрелки, например, палец 12 (фиг. 2) не уперся в шатун 13. Соединение 14 находится от пальца 9 на расстоянии, равном диаметру расположения
пальцев 11 -13 относительно центра вращения кривошипа.
На каретках 4 расположены вакуумные захваты 15 с приводом 16 их вертикального возвратно-поступательного перемещения и щетки 17. Для упрощения установки кареток щатуны 3 выполнены из двух частей, которые соединены гайкой 18.
Манипулятор работает следующим образом.
Металлокерамические карты 19 поступают на исходную позицию, откуда вакуумным захватом 15 передаются на приемную позицию 20 механизма шагового перемещения устройства сущки. После прохождения камеры 21 сущки карты поступают на позицию 22 разгрузки, откуда вакуумным захватом переносятсй на транспортер 23, передающий карты на операцию рихтовки. При смене щтампа в установке рихтовки карты транспортируются на резервную позицию 24 разгрузки, откуда вакуумным захватом передаются в накопитель или отводящий транспортер 25. В то же время пустое гнездо под карту очищается установленной на карте щеткой 17.
Все рабочие перемещения кареток 4 производятся синхронно от приводного ревер- сивно перемещающегося кривошипа 2. Манипулятор снабжен датчиками 26 обратной связи. Вращением гайки 18 при необходимости производится регулировка установки рабочих органов относительно карт.
Формула изобретения
Манипулятор, содержащий основание с радиальными направляющими, рабочие органы, размещенные в этих направляющих, и приводной кривощипно-шатунный механизм, кривошип которого выполнен в форме диска, а шатуны последовательно установлены на кривошипе и свободными концами связаны с рабочими органами, отличающийся тем, что, с целью расширения технологических возможностей за счет увеличения числа рабочих органов при одновременном повышении точности их пози- ционирования, основание выполнено в виде П-образной рамы, в верхней части которой установлен кривоц1ип приводного кривошипно-шатунного механизма, а шатуны этого механизма выполнены регулируемыми по длине и каждый последующий шатун закреплен относительно нижней плоскости кри- BOHjnna на высоте, превышающем высоту крепления предыдущего шатуна.
дидА 11 &
26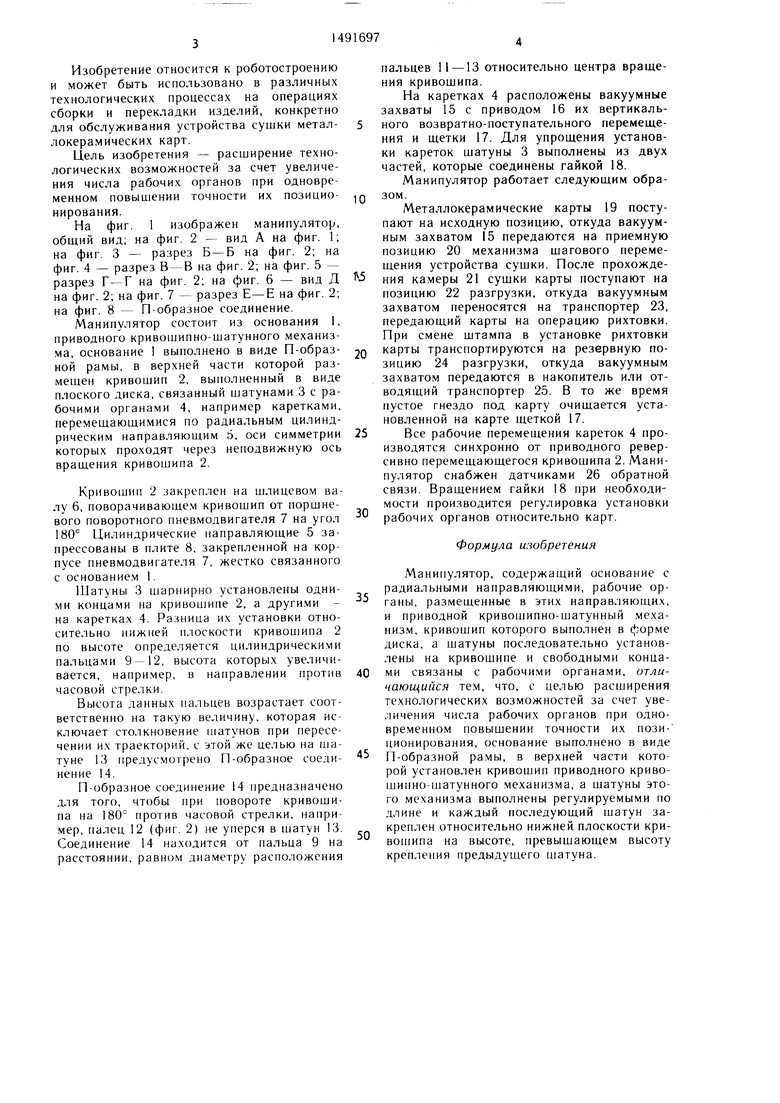
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передвижения каретки со стеклом | 1983 |
|
SU1142458A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2760516C1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ПРЕДМЕТОВ В ТАРУ | 1996 |
|
RU2138425C1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ШТУЧНЫХ ПРЕДМЕТОВ | 1996 |
|
RU2146213C1 |
| МАШИНА ДЛЯ УКЛАДКИ В ТАРУ ШТУЧНЫХ ИЗДЕЛИЙ | 1993 |
|
RU2085451C1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В ТАРУ | 2006 |
|
RU2313478C1 |
| Устройство для перекладки деталей с подающего транспортера на приемный | 1980 |
|
SU933581A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Полуавтомат для сборки пластинчатых магнитопроводов трансформаторов | 1983 |
|
SU1176395A1 |
Изобретение относится к роботостроению и может быть использовано в различных технологических процессах на операциях сборки и перекладки изделий, а именно для обслуживания устройства сушки металлокерамических карт. Целью изобретения является расширение технологических возможностей за счет увеличения числа рабочих органов при одновременном повышении точности их позиционирования. Для этого основание 1 выполнено в виде П-образной рамы, в верхней части которой размещен кривошип 2, приводного кривошипно-шатунного механизма, шатуны 3 которого связаны с рабочими органами (каретками) 4, перемещающимися по радиальным цилиндрическим направляющим 5, оси симметрии которых проходят через неподвижную ось вращения кривошипа 2. Установка шатунов на нижней плоскости кривошипа определяется по высоте цилиндрических пальцев, высота которых увеличивается, например, в направлении против часовой стрелки. Высота этих пальцев возрастает на величину, исключающую столкновение шатунов при пересечении их траекторий. Кроме того, шатуны выполнены из двух частей, соединенных гайкой , с возможностью регулировки. 8 ил.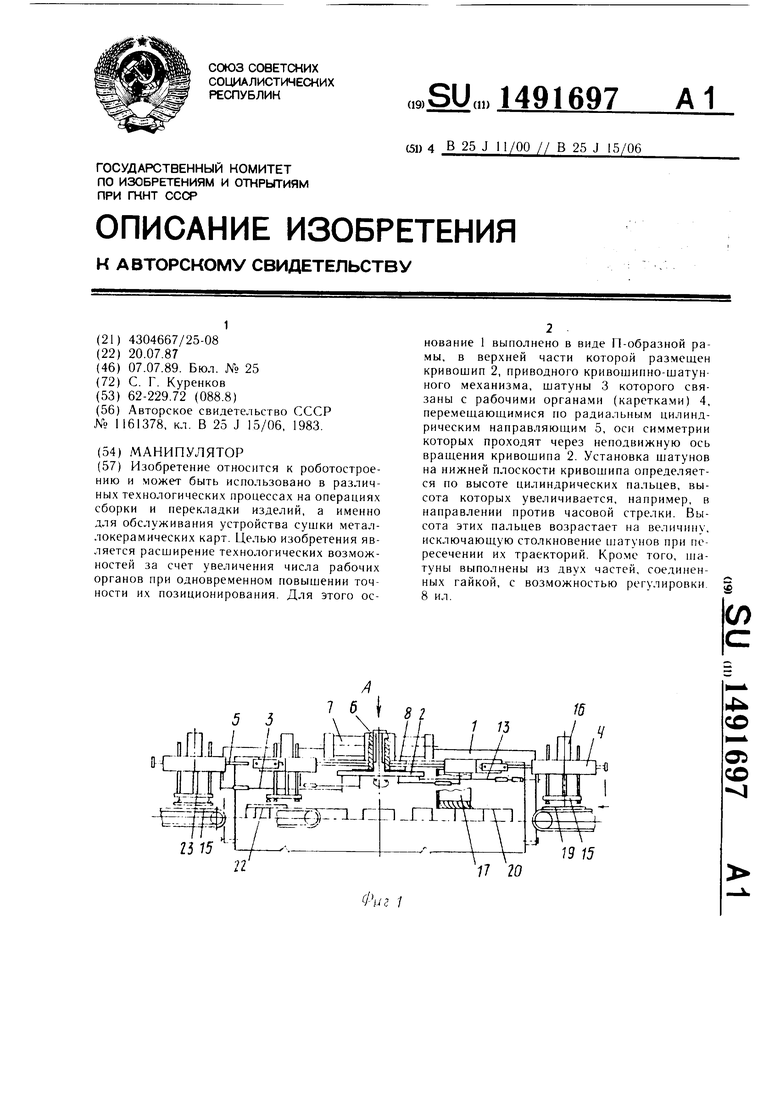
6-6
9 Фиг.з
г- Г /7oSef)Hi//770 18
.5
лоВернил7О 8.5
Фиг. 7
Фиг. г
5-В noSefl i// o 10
Фиг.
Фиг. 6
7J /4
фиг. 8
| Схват | 1983 |
|
SU1161378A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
