р
1
эо
111
Изобретение относится к робототехнике,, а именно к конструкциям захватных устройств манипуляторов.,
Известен схват, содержащий корпус, манжету и пневмопривод с клапаном l j
Недостатком известного схвата является низкая надежность работы.
Цель изобретения - повышение надежности работы.
Цель достигается тем, что в су вате,, содержащем корпус, и пневмопривод с юияпаном, пневмопривод выполнен в виде пневмоцилиндра с подпружинен 1ьгм полым штоком, на торце которого закреплена манжета и выполнено отверстие, соединенное с полостью штока, при зтом клапан подпружинен и размещен в полости штока которая соединена с рабочей полостью пневмоцилиндра, при этом жесткость пружины штока больше жесткости пружины клапана.
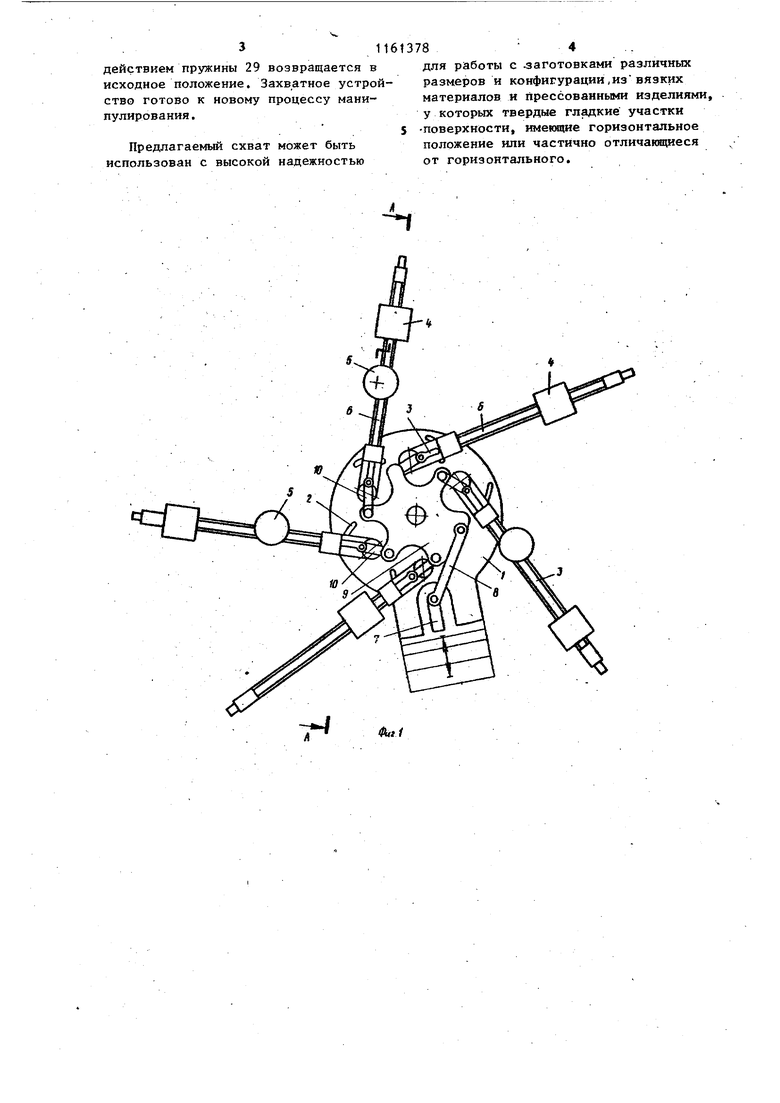
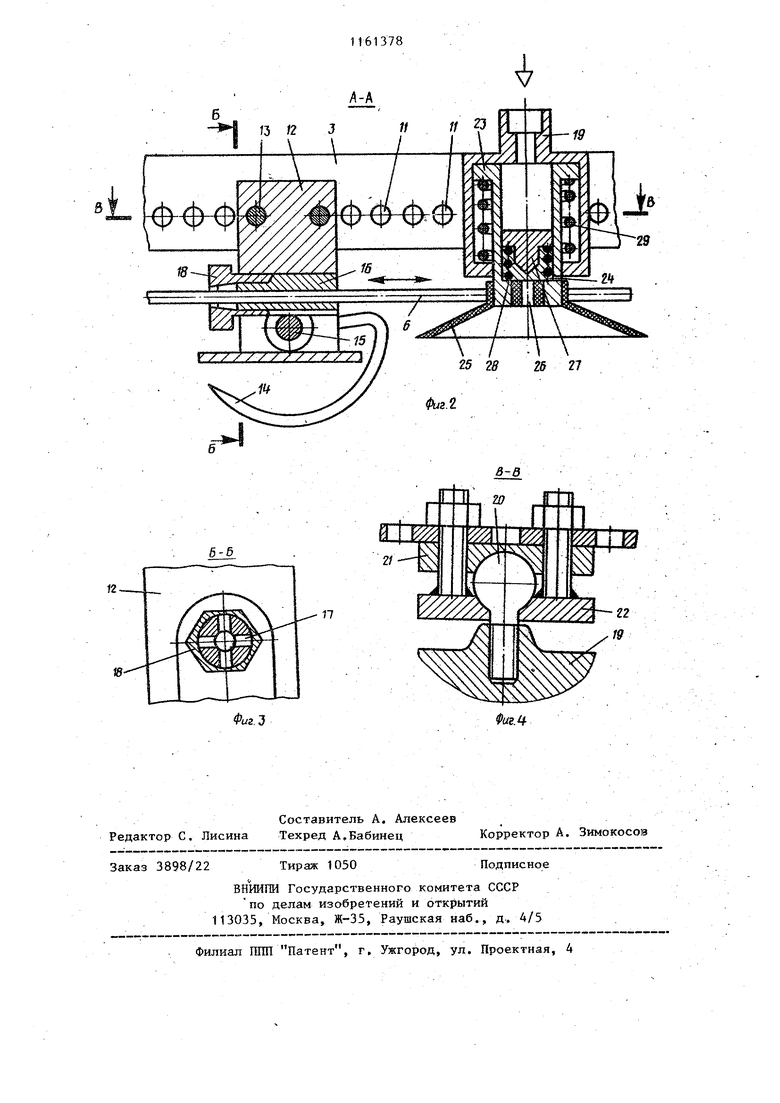
На фиг. 1 схематически представлен предлагаемый схват, общий вид; на фиг„ 2 - разрез А-А на фиг. 1; на фиг, 3 - разрез Б-Б на фиг, 2; на фиг, 4 - разрез В-В на фпг. 2,
Схват состоит из корпуса 1 с пазами 2 для перемещения на некоторый угол в горизонтальной плоскости штанг 3 с захватньпчи элементами, расположенньми по периметру корпуса 1 по форме изделия, Механическими 4 и вакуумньгмИ 5, жесткой тяги 6, штока 7,,, шатуна 8, кривошипа 9, соединенного с члатунами 10, Штанги 3 имеют отверстия 11 для крепления захватных элементов 4 и 5.
Механический захватный элемент 4 состоит из основания 12, закрепленного на штанге 3 болтами 13, изогнутой по окружности иглы-14, жестко связанной, с зубчатым колесом 15, имеющим возможность поворачиваться вокруг центра кривизны иглы на угол, обеспечивающий протыкание заготовки с двух сторон, зубчатой рейки 16, соединяющейся пазами 17 посредством гайки 18 с .жесткой тягой 6..
Вакуумный захватный элемент 5 состоит из пневмоцилиндра 19,, закреп-ленного на штанге 3 посредством шаровой опоры 20, шайбы 21, траверсы 22, штока 23 с .отверстием 24, резиновой уплотнительной манжеты 25, отг верстия 26j клапана 27 и пружин 28 и 29. .
82 . ,
Захват заготовки механическими захватными элементами осуществляется следующим образом.
Шток 7 привода, вьщнигаясь посредством шатуна поворачивает кривошип 9, Последний через шатуны 10 втягивает тяги 6, перемещая закрепленные на них зубчатые рейки 16, которые поворачивают зубчатые колеса 15- с закрепленными на них иглами 14. Последние,поворачиваясь на угол 180 , протыкают заготовку и накалывают ее с обратной стороны, что исключает -ее соскальзывание с иглы 14 во время манипулирования. Заготовка переносится в пресс, Давление жидкости или воздуха подается в другую полос ь цилиндра привода (не показан). Шток 7 втягивается, кривошип 9 поворачивается в обратном направлении, толкая жесткие тяги 6, перемещая зубчатые рейки 16 в обратном направлении. Зубчатые колеса 15 вместе с. иглами 14 поворачиваются в обратном направлении, освобождая заготовку. После прессования изделие имеет твердую поверхность с плоскими отдельными участками, и его захват осур}ествляется вакуумными захватными э;з 1№ентами 5 следующим о.бразом. Сжатый воздух подается в надпоршневое пространство пневмоцилиндра 19. Цри этом клапан 27, сжимая пруткину 28, опускается на отверстие 26, перекрывая его и перекрывая сообщение полости манжеты 25 с атмосферой через отверстие 24 в стенке штока 23. Давление воздуха в надпоршневом пространстве нарастает, и шток 23, сжимая ружину 29 более жесткую, чем 28, опускаетс я, пр гжимая манжету 25 к поверхности готового изделия.
Ориентация захватных элементов 5 в горизонтальной плоскости осуществляется с помощью шаровой опоры 20, При этом воздух вытесняется из сдеформированной полости манжеты 25, При поднятии захватного устройства упругие силы, восстанавливая форму манжеты 25, создают разрежение в полости, обеспечивающее захват готового изделия. Изделие переносится в накопитель. Для освобождения изделия давление в надпоршневом пространстве сбрасывается, пружина 28 поднимает клапан 27, который открывает отверстие 26. Воздух через отверстие 24 поступает в полость манжеты 25, и изделие сбрасывается. Шток 23 под
действием пружины 29 возвращается в исходное положение. Захватное устройство готово к новому процессу манипулирования.
Предлагаемый схват может быть использован с высокой надежностью
для работы с .заготовками различных размеров и конфигурации,извязких материалов и прессованными изделиями, у которых твердые гладкие участки поверхности, тлеющие горизонтальное положение или частично отличакициеся от горизонтального.
Л
б-б
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для изготовления гиперболоидных контактных узлов Карташева В.В. | 1987 |
|
SU1554058A1 |
| Однопозиционный формовочный автомат | 1987 |
|
SU1424944A1 |
| Робот к листоштамповочному прессу | 1986 |
|
SU1465158A1 |
| Захватное устройство | 1988 |
|
SU1613226A1 |
| Автооператор | 1984 |
|
SU1191256A1 |
| Схват промышленного робота | 1984 |
|
SU1250452A1 |
| Устройство для подачи длинномерного материала в зону обработки | 1983 |
|
SU1107931A1 |
| Промышленный робот | 1983 |
|
SU1155334A1 |
| Грузозахватное устройство | 1986 |
|
SU1364592A1 |
| Машина для сборки изоляторов | 1986 |
|
SU1403107A1 |
СХВАТ, содержащий корпус, манжету и пневмопривод с клапаном. о т ли ча ющий с я тем, что, с целью повышения надежности работы, пневмопривод выполнен в виде пневмоцилиндра с подпружиненным пол{Л4 штоком, на торце которого закреплена манжета и вьтолнено отверстие, соединенное с полостью штока, при этрм клапан подпружинен и размещен в полости .штокз которая срединейа с рабочей полостью пневмоцилиидра, .при этом жесткость пружины штока больше жесткости пружины клапана.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Вакуумное захватное устройство | 1980 |
|
SU925836A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
