(Л
ю У1
314
h хорды кринолянеиного учлсткл контура сечения В определяют по формуле с учетом радиусов сечения В и фрезы ИО и точности обработки контура В. По определенной величине h корректируют координаты опорных точек перемещения ИО. В устр-во для реализации способа введены дополнительно дешифратор 6 и подключенные к их входам переключатели: форм сечений У, размеров сечения 9, схем 10 обработки забоя, точности обработки контура сечений 11 и радиусов 12 фрез ИО. Выход дешифратора 6 соединен с входом блока 5 выбора программ. К другому входу блока 5 подключен выход дешифратора 4, связанного через двоичный счетчик 3 и ключ 2 с генератором I сдвигаюг их импульсов. Выходы блока 5 соединены
454
с входами блоков 13 и 14 задания программ г оризонталыюго и вертикального движения ИО. Вькоды блоков 13 и 14 соединены с соответствующими входами блока 15 коррекции. Скорректированные сигналы поступают на соответствующие входы ячеек блоков 16 и 17 сравнения и направления движения с текущими значениями положения ИО с датчиков горизонтального 18 и вертикального 19 положений ИО. Сигналы рассогласования воздействуют на исполнительные элементы 20 и 21 перемещения ИО. Циклы В и коррекция заданного положения ИО относительно заданного направления В вьтолняются п раз до окончания заданной программы движения ИО. 2 с. п. ф-л ы, 3 ил.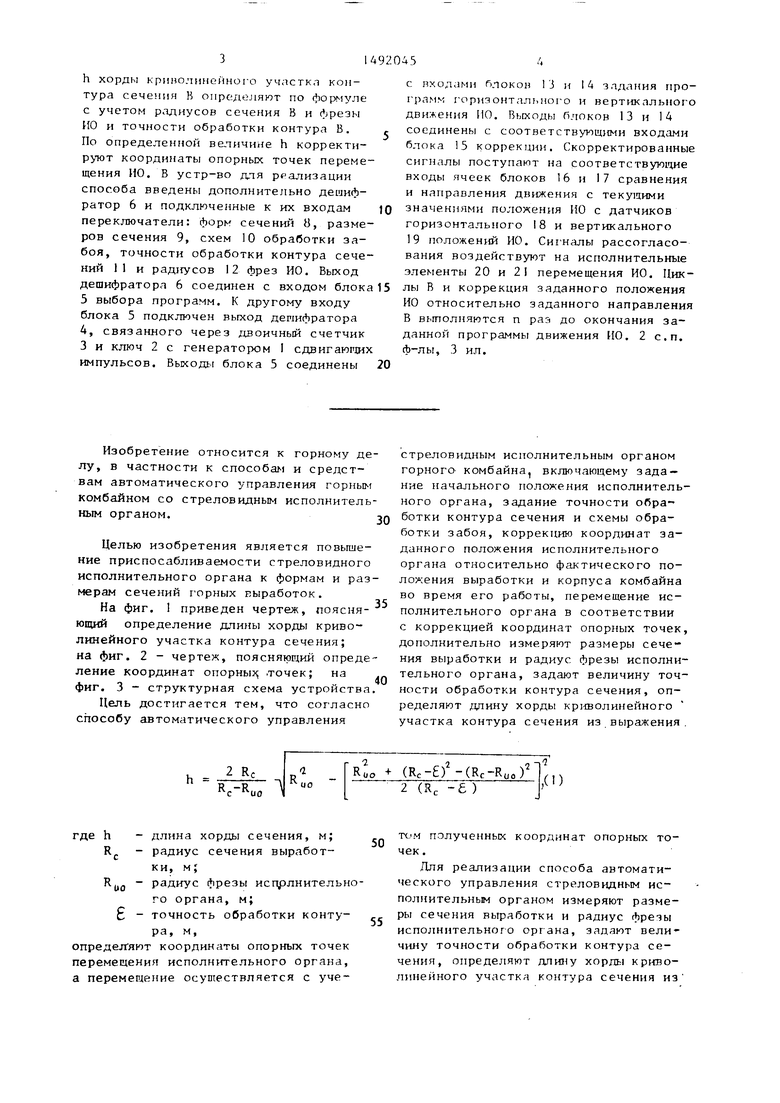
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления стреловидным исполнительным органом горного комбайна | 1982 |
|
SU1040143A1 |
| Устройство для автоматического управления стреловидным исполнительным органом горного комбайна | 1966 |
|
SU699178A1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ СКОРОСТИ ПОДАЧИ СТРЕЛОВИДНОГО ИСПОЛНИТЕЛЬНОГО ОРГАНА ПРОХОДЧЕСКОГО КОМБАЙНА | 2011 |
|
RU2464420C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ИЗБИРАТЕЛЬНОГО ДЕЙСТВИЯ ГОРНОПРОХОДЧЕСКОГО КОМПЛЕКСА | 2007 |
|
RU2360111C2 |
| Способ управления стреловым исполнительным органом горнопроходческого комбайна | 1985 |
|
SU1285149A1 |
| Система программного управления угледобывающим комбайном | 1988 |
|
SU1610002A2 |
| Устройство отображения положения исполнительного органа проходческого комбайна избирательного действия | 1984 |
|
SU1249158A1 |
| Система автоматического управления исполнительным органом проходческого комбайна избирательного действия | 1986 |
|
SU1330311A1 |
| Устройство управления горной машиной в профиле пласта | 1980 |
|
SU972089A1 |
| Стреловидный исполнительный орган проходческого комбайна | 1976 |
|
SU613099A1 |
Изобретение относится к горному делу и позволяет повысить приспосабливаемость стреловидного исполнительного органа (ИО) к формам и размерам сечений горных выработок (В). Задают начальное положение ИО, точность обработки контура сечения, схемы обработки контура сечения и схемы обработки забоя. Во время работы горного комбайна корректируют координаты заданного положения ИО относительно фактического положения В и корпуса комбайна. В соответствии с коррекцией координат опорных точек перемещают ИО. Дополнительно задают размеры сечения В и радиус фрезы ИО. Длину H хорды криволинейного участка контура сечения В определяют по формуле с учетом радиусов сечения В и фрезы ИО и точности обработки контура В. По определенной величине H корректируют координаты опорных точек перемещения ИО. В УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА ВВЕДЕНЫ ДОПОЛНИТЕЛЬНО ДЕШИФРАТОР 6 И ПОДКЛЮЧЕННЫЕ К ИХ ВХОДАМ ПЕРЕКЛЮЧАТЕЛИ: ФОРМ СЕЧЕНИЙ 8, РАЗМЕРОВ СЕЧЕНИЯ 9, СХЕМ 10 ОБРАБОТКИ ЗАБОЯ, ТОЧНОСТИ ОБРАБОТКИ КОНТУРА СЕЧЕНИЙ 11 И РАДИУСОВ 12 ФРЕЗ ИО. Выход дешифратора 6 соединен со входом блока 5 выбора программ. К другому входу блока 5 подключен выход дешифратора 4, связанного через двоичный счетчик 3 и ключ 2 с генератором 1 сдвигающих импульсов. Выходы блока 5 соединены с входами блоков 13 и 14 задания программ горизонтального и вертикального движения ИО. Выходы блоков 13 и 14 соединены с соответствующими входами блока 15 коррекции. Скорректированные сигналы поступают на соответствующие входы ячеек блоков 16и 17 сравнения и направления движения с текущими значениями положения ИО с датчиком горизонтального 18 и вертикального 19 положения ИО. Сигналы рассогласования воздействуют на исполнительные элементы 20 и 21 перемещения ИО. Циклы В и коррекция заданного положения ИО относительно заданного направления В выполняются N раз до окончания заданной программы движения ИО. 2 с.п.ф-лы, 3 ил.
Изобретение относится к горному делу, в частности к способам и средствам автоматического управления горны комбайном со стреловидным исполнительным органом.3Q
Целью изобретения является повышение приспосабливаемости стреловидного исполнительного органа к формам и размерам сечений горных выработок.
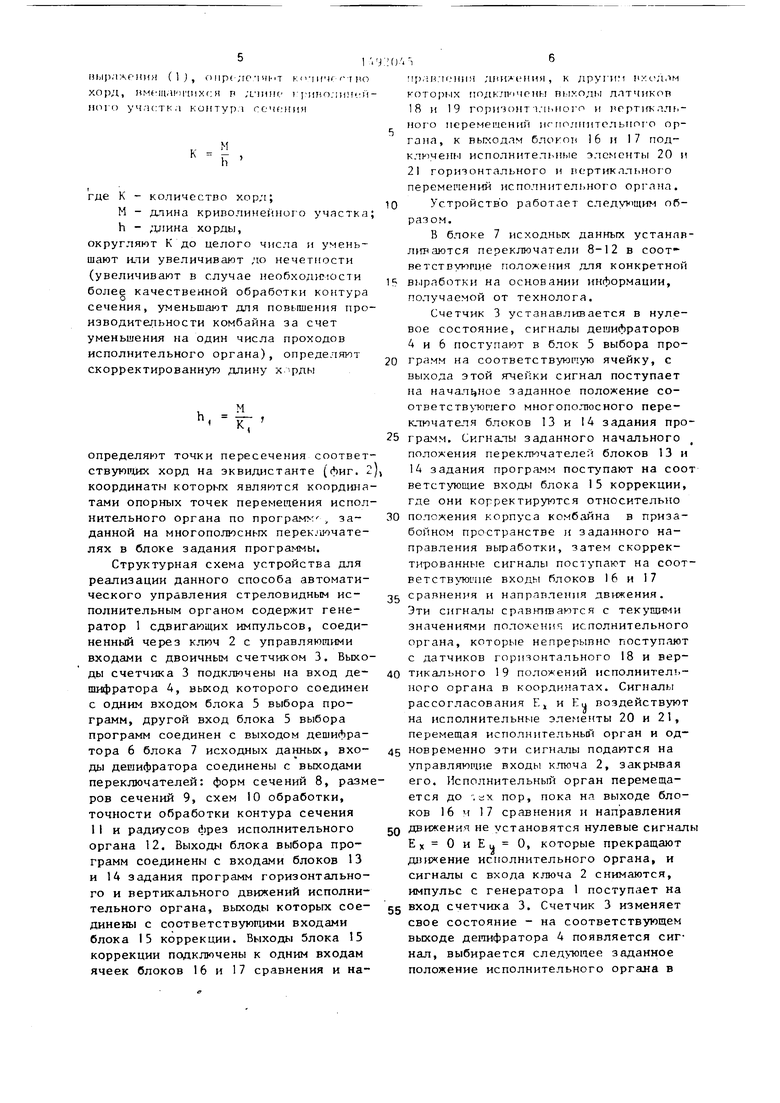
На фиг. 1 приведен чертеж, поясняющий определение длины хорды криволинейного участка контура сечения; на фиг. 2 - чертеж, поясняющий определение координат опорных; .точек; на фиг. 3 - структурная схема устройства.
Цель достигается тем, что согласно способу автоматического управления
где h - длина хорды сечения, м; R - радиус сечения выработки, м; R - радиус фрезы исгцэлнительнго органа, м;
- точность обработки контура, м,
определ яют координаты опорных точек перемещения исполнительного органа, а перемещение осушествляется с учеQ
5
0
стреловидным исполнительным органом горного комбайна, включающему задание начального положения исполнительного органа, задание точности обра- ботки контура сечения и схемы обработки забоя, коррекцию координат заданного положения исполнительного органа относительно фактического положения выработки и корпуса комбайна во время его работы, перемещение исполнительного органа в соответствии с коррекцией координат опорных точек, дополнительно измеряют размеры сечения выработки и радиус фрезы исполнительного органа, задают величину точности обработки контура сечения, определяют длину хорды криволинейного участка контура сечения из выражения.
Tt, M полученных координат опорных точек .
Для реализации способа автоматического управления стреловидным исполнительным органом измеряют размеры сечения выработки и радиус фрезы исполнительного органа, задают величину точности обработки контура сечения, определяют длину хорды криволинейного участка контура сечения из
ПЫр.ЧАОИИЯ (Ij, Ollp( Ко-щчггтцо
хорд, HMCinai ii tiixcH р ачинг .-щией- ппго участка контура сс ишии
-кгде К - количество xop;i;
М - длина криволинейног о участка
h - ;ц1ина хорды,
округляют К до целого числа и уменьшают или увеличивают до нечетности (увеличивают в случае необходи ости более качественной обработки контура сечения, уменьшают для повышения производительности комбайна за счет уменьшения на один числа проходов исполнительного органа), определяют скорректированную длину х -рды
l
определяют точки пересечения соответ- ствуюпщх хорд на эквидистанте (фиг. 2 координаты которых являются координатами опорных точек перемещения исполнительного органа по програм ; , заданной на многополюсньгх переключателях в блоке задания программы.
Структурная схема устройства для реализации данного способа автоматического управления стреловидным исполнительным органом содержит генератор 1 сдвигающих импульсов, соеди- ненньй через ключ 2 с управляющими входами с двоичным счетчиком 3. Выходы счетчика 3 подключены на вход дешифратора 4, выход которого соединен с одним входом блока 5 выбора программ, другой вход блока 5 выбора программ соединен с выходом дешифратора 6 блока 7 исходных данных, входы дешифратора соединены с вьсходами переключателей: форм сечений 8, разме ров сечений 9, схем 10 обработки, точности обработки контура сечения 11 и радиусов фрез исполнительного органа 12. Выходы блока выбора программ соединены с входами блоков 13 и 14 задания программ горизонтального и вертикального движений исполнительного органа, выходы которых соединены с соответствующими входами блока 15 коррекции. Выходы блока 15 коррекции подключены к одним входам ячеек блоков 16 и 17 сравнения и на5
:()A i6
np,in;i(. HiiH ;uiH( HHH, к другим iixc ji.iM
которых подключены ПЫ.ХОД, ЛЛТЧИКОП
18 и 19 гори 3(5ят i. ii.Horo ц 1 ррт1П аль- ного перемещений иггюлннтслыюго органа, к выходам блоко( 16 и 17 под- ключеш исполнительные элементы 20 и 21 горизонтального и пс ртикал1 ного перемещений исполнительного органа.
10Устройств о работает следующим образом.
В блоке 7 исходных данных устанпв- Л1граются переключатели 8-12 в соот-- ветствуюпие положения для конкретной
1 выработки на основании информации, получаемой от технолога.
Счетчик 3 устанавливается в нулевое состояние, сигналы дещифраторов 4 и 6 поступают в блок 5 выбора про20 грамм на соответствующую ячейку, с выхода этой ячейки сигнал поступает на начал15ное заданное положение со- ответств т |щего многополюсного переключателя блоков 13 и 14 задания про25 грамм. Сигналы заданного начального
положения переключателей блоков 13 и 14 задания программ поступают на соот ветстующие входы блока 15 коррекции, где они корректируются относительно
30 положения корпуса комбайна в приза- бойном пространстве и заданного направления вьфаботки, затем скорректированные сигналы поступают на соот- BeTCTB TOL4iie входы блоков 16 и 17
3g сравнения и направлелия движения. Эти сигнаты сравн1шаются с текущими значениями положения исполнительного органа, которые непрерывно поступают с датчиков горизонтального 18 и вер40 тикального 19 положений исполнительного органа в координатах. Сигналы рассогласования Е и Ей воздействуют на исполнительные элементы 20 и 21, перемещая исполнительньв орган и од45 новременно эти сигналы подаются на управляющие входы ключа 2, закрывая его. Исполнительный орган перемещается до .ах пор, пока на выходе блоков 16 ч 17 сравнения и направления
5Q движения не установятся нулевые сигналы ЕХ О иЕи О, которые прекращают движение исполнительного органа, и сигналы с входа ключа 2 снимаются, импульс с генератора 1 поступает на
55 вход счетчика 3. Счетчик 3 изменяет свое состояние - на соответствующем выходе дещифратора 4 появляется сигнал, выбирается след тощее заданное положение исполнительного органа в
блокпх 14 и 13 члдлиия программ. Заданные сигналы положения исполнительного органа подаются на входы блока коррекции, где корректируются и далее подаются на входы соотнетст- в топшх блоков 16 и 17 сравнения и направления движения. На другие входы блоков 16 и 17 поступают сигналы текущего положения исполнительного органа с датчиков 18 и 19, которые сравниваются со скорректированными заданными сигналами. Сигналы рассогласования Е, и Ей закрывают ключ 2 и воздействуют на исполнительные элементы 20 и 21, Исполнительный орган перемешается к заданной опорной точке сечения выработки до тех пор, пока сигналы рассогласования К и Ей не ну;гевые значения. Затем сигналы с ключа 2 снимаются, с генератора 1 поступает импульс на вход счетчика 3, которьш изменяет состояние, на соответствующем вькоде дешифратора 4 появляется сиг нал, в блоках 13 и 14 задания программ выбирается :ледующее заданное положение исполнительного органа, которое корректи- )уется в блоке коррекции и подается на исполнительные элементы. Исполнительный орган перемещается к следующей заданной точке сечения выработки
Таким образок, циклы выработки и коррекция заданного положения исполнительного органа относительно заданного направления выработки выполняются п раз до окончания заданной программы движения исполнительного органа.
2 Re
с uo
п | RL + (RC-) -(RC-RUO
° I2 (R, -6)
где R - радиус сечения горной выра-
ботки, м;
R - pa TJfyc фрезы исполнительного органа, м;. 6 - точность обработки контура,
по которой корректируют КООрД11НаТЫ
опорньос точек перемещения исполнительного органа.
Таким образом, про/иыг аомые способ и устройство автоматического управления стреловидным исполнительным
)юм органом горного комбайна обе- сггсчииают универс.гльность за счет выборки блоком 7 исходных данных соответствующих прог рамм перемещения исполнительного органа при обработке
забоя различных форм и размеров сечений горными комбайнами с различными радиусами фрез исполнительного органа,
Формула изобретения
начального положения исполнительного органа, задание точности обработки контура сечения, схемы обработки забоя, коррекцию координат заданного положения исполнительного органа относительно фактического положения
выработки и корпуса горного комбайна во время его работы, перемещение исполнительного органа в оответствие с коррекцией координат опорных точек,
отличаю 14 ийся тем, что, с целью повьаиения приспосабливаемости стреловидного исполнительного органа горного комбайна к формам и размерам сечений горных выработок, дополнительно задают размеры сечения выработки и радиус фрезы исполнительного органа, определяют длину хорды криволинейного участка контура сечения h из выражения
П2
с управляющими входами, двоичный счетчик, дешифратор, блок ячеек выбора программ, блоки задания программ блоки ячеек сравнения и направления движения, блок коррекции, причем двоичный счетчик соединен с дешифратором непосредственно и с генератором сдвигающих импульсов через ключ, управляющие входы которого подключены к выходам блоков ячеек сравнения и направления движения, а выходы дешифратора соединены с одними входами ячеек блока выбора прог рамм, выходы которых подключены к BxojiaNt блоков задания программ, выходы датчиков горих
ЦЗиг.г
| Устройство для автоматического управления стреловидным исполнительным органом горного комбайна | 1966 |
|
SU699178A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для автоматического управления стреловидным исполнительным органом горного комбайна | 1982 |
|
SU1040143A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
