Изобретение относится к горному делу, в частности к средствам автом тического управления горным комбайном со стреловидным исполнительным органом. Известно следящее устройство управления стреловидным исполнительны органом горного комбайна, которое содержит гидродомкраты - датчики вертикального и горизонтального перемещения исполнительного органа,гидравлически связанные с серводомкратами, на штоках которых установл ны две взаимно перпендикулярные кулисы, связанные с пантграфом, воспроизводящим на экране положение исполнительного органа в забое l. Известно также устройство для автоматического управления стреловидным исполнительным органом горно го комбайна, содержащее датчики горизонтального, и вертикального перемещения исполнительного органа, исполнительные элементы, генератор сдвигающих импульсов, ключ с управляющими входами, двоичный счетчик, дешифратор, блок ячеек выбора программ, блок ячеек сравнения и направления движения, причем двоичный счетчик соединен с дешифратором непосредственно и с генератором сдв гающих импульсов через ключ, управляющие входы которого подключены к выходам блоков ячеек сравнения и нйправления движения, а выходы де шифратора соединены с входами ячеек блока выбора программы, выходы кото рых через блоки задания программ по ключены к одним входам ячеек блока, сравнения и направления движения, а выходы датчиков, горизонтального и вертикального перемещения исполни тельного органа подключены к другим входам ячеек соответствующего блока сравнения и направления движенияj блоки задания программ выполнены на многополюсных переключателях, каждое положение которого поставлено в соответствие с координатой дат чика горизонтального и вертикальног перемещения исполнительного органа. Известное устройство предназначено для автоматического управления перемещением стреловидного исполнительного органа горнопроходческого комбайна по заданной программе обра ботки забоя при проведении подготовительных выработок 2 . Однако опыт эксплуатации проходческих комбайнов выявил наличие существенного недостатка в работе этих машин, заключающегося в значительном отклонении проходимых ими выработок от заданного направления. Поэтому для проведения горных выработок по заданному направлению необ ходимо корректировать заданную программу управления стреловидным исполнительным органом с учетом положения корпуса комбайна в призабойном пространстве и отклонения проходимой им выработки от заданного направления. Кроме того, в известном устройстве коррекция программы управления не осуществляется, что также является существенным недостатком устройства. Целью изобретения является пойы- шеиие точности проведения выработокпо заданному направлению. Поставленная цель достигается тем, что в устройство для автоматического управления стреловидным исполнительным органом горного комбайна, содержащее датчики горизонтального и вертикального перемещения исполнительного органа, исполнительные элемен-ты, генератор сдвигающих импульсов, ключ с управляющими ,входами, двоичный счетчик, дешифратор, блок ячеек выбора программ, блоки задания программ, блоки ячеек сравнения и направления движения, причем двоичный счетчик соединен с дешифратором непосредственно и с генератором сдвигающих импульсов через ключ, управляющие входы которого подключены к выходам блоков ячеек сравнения и направления движения, а выходы дешифратора соединены с входами ячеек блока выбора программ, выходы которых подключены к входам блоков задания программ, выходы датчиков горизонтального и вертикального перемещения исполнительного органа подключены к одним входам ячеек соответствующих блоков сравнения и направления движения, введен блок коррекции, состоящий из триггера коррекции, горизонтального и вертикального регистров коррекции, сумматоров горизонтального и вертикального перемещений,, переключателей горизонтального и вертикального коррекции и блоков задания горизонтального и вертикального направлений выработки, причем выход триггера кор- рекции соединен с входами регистров коррекции горизонтального и вертикального перемещений, к другим входам которых подключены выходы переключателей горизонтальной и вертикальной коррекции и выходы блоков задания горизонтального и вертикального направлений выработки, а к выходам - входы сумматоров вертикального и горизонтального перемещений, к другим входам которых подключены выходы блоков задания программ, при этом выходы сумматоров горизонтального и Вертикального перемещений соединены с другими входами блоков ячеек сравнения и направления движения.
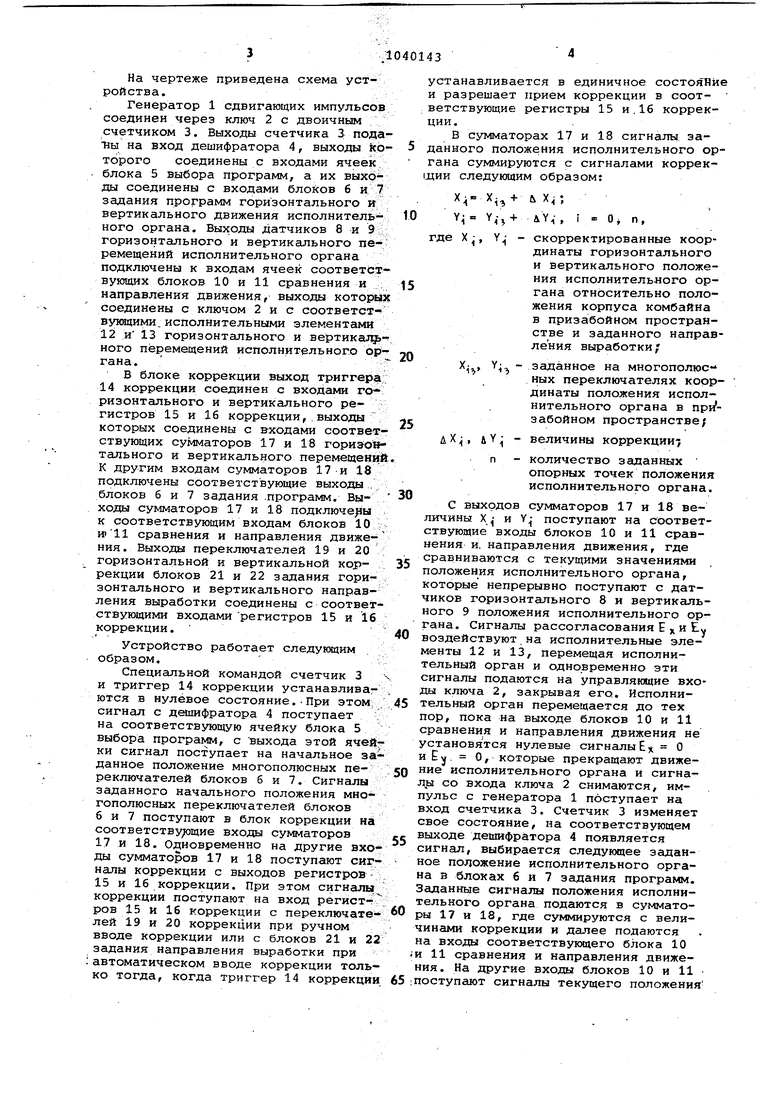
На чертеже приведена схема устройства.
Генератор 1 сдвигающих импульсов соединен через ключ 2 с двоичным счетчиком 3. Выходы счетчика 3 поданы на вход дешифратора 4, выходы которого соединены с входами ячеек блока 5 выбора программ, а их выходы соединены с входами блоков 6 и 7 задания программ горизонтального и вертикального движения исполнитель ного органа. Выходы датчиков 8 и 9 горизонтального и вертикального перемещений исполнительного органа подключены к входам ячеек соответствующих блоков 10 и 11 сравнения и направления движения, выходы которых соединены с ключом 2 и с соответствующими, исполнительными элементами 12 и 13 горизонтального и BepTHKaJQiного перемещений исполнительного органа.
В блоке коррекции выход триггера
14коррекции соединен с входами го- ризонтального и вертикального регистров 15 и 16 коррекции,.выходы которых соединены с входами соответствующих сумматоров 17 и 18 гориао тального и вертикального перемещений К другим входам сумматоров 17-и 18 подключены соответствующие выходы , блоков б и 7 задания .программ. Выходы сумматоров 17 и 18 подключены
к соответствующим входам блоков 10 сравнения и направления движе- ния. Выходы переключателей 19 и 20 горизонтальной и вертикальной коррекции блоков 21 и 22 задания горизонтального и вертикального направления выработки соединены с соответствующими входами регистров 15 и 16 коррекции.
Устройство работает следукщим образом.
Специальной командой счетчик 3 и триггер 14 коррекции устанавливаются в нулевое состояние.При этом сигнал с детиифратора 4 поступает на соответствующую ячейку блока 5 выбора программ, с выхода этой ячейки сигнал поступает на начальное заданное положение многополюсных переключателей блоков 6 и 7. Сигналы заданного начального положения многополюсных переключателей блоков б и 7 поступают в блок коррекции на соответству;ощие входы сумматоров 17 и 18. Одновременно на другие входы сумматоров 17 и 18 поступают сигналы коррекции с выходов регистров 15и 16 коррекции. При этом сигналы коррекции поступают на вход регистров 15 и 16 коррекции с переключателей 19 и 20 коррекции при ручном вводе коррекции или с блоков 21 тл 22 задания направления выработки при
; автоматическом вводе коррекции только тогда, когда триггер 14 коррекции
устанавливается в единичное состояВИе и разрешает прием коррекции в соответствующие регистры 15 и,16 коррекции.
В сумматорах 17 и 18 сигналы заданного положения исполнительного органа суммируются с сигналами коррекцции следующим образом:
л X
Х,+
ч
0
, Oj n,
YO +
где X , Y; скорректированные координаты горизонтального и вертикгшьного положения исполнитель«ого ор5гана относительно положения корпуса комбайна в призабойном пространстве и заданного направления выработки/
0
заданное на многополюсных переключателях координаты положения исполнительного органа в nprfзабойном пространстве;
5
Д)1 Д - величины коррекции7
n - количество заданных
опорных точек положения исполнительного органа.
0
С выходов сумматоров 17 и 18 величины X и поступают на соответствующие входы блоков 10 и 11 сравнения и, направления движения, где сравниваются с текущими значениями
5 положения исполнительного органа, которые непрерывно поступают с датчиков горизонтального 8 и вертикального 9 положения исполнительного органа. Сигналы рассогласованияЕX и Еу
0 воздействуют на исполнительные элементы 12 и 13, перемещая исполнительный орган и одновременно эти сигналы подаются на управляющие входы ключа 2, закрывая его. Исполни5тельный орган перемещается до тех пор, пока на выходе блоков 10 и 11 сравнения и направления движения не установятся нулевые сигналы ЕХ О иЕ. О, которые прекращают движение исполнительного органа и сигна0лы со входа ключа 2 снимаются, импульс с генератора 1 поступает на вход счетчика 3. Счетчик 3 изменяет свое состояние, на соответствующем выходе дешифратора 4 появляется
5 сигнал, выбирается следующее заданное положение исполнительного органа в блоках 6 и 7 задания программ. Заданные сигналы положения исполнительного органа подаются в суммато0ры 17 и 18, где суммируются с величинами коррекции и далее подаются на входы соответствующего блока 10
;и 11 сравнения и направления движения. На другие входы блоков 10 и 11
5
; поступают сигналы текущего положения
исполнительного органа с датчиков 8 и 9, которые сравниваются со скорректированными заданными сигналами. Сигналы рассогласования Е и Е эаI крываиот ключ 2 и воздействуют на исполнительные элементы 12 и 13. Исполнительный орган перемещается к Зсщанной опорной точке сечения выработки до тех пор пока сигналы рассогласования Е X и С у не примут нулевые значения. Затем сигналы с ключа 2 снимаются и с генератора 1 поступает импульс на вход счетчика 3, который изменяет состояние, на соответствующем выходе дешифратора 4 появляется сигнал, в блоках б и 7 задания программ выбирается следующее заданное положение исполнительного органа, которое скорректировано в блоке коррекции и подано на исполнительные элементы. Исполнительный орган перемещается к следующей заданной точке сечения выработки.
Таким образом, циклы выборки и коррекции заданного положения исполнительного органа относительно за данного направления выработки выполняются п-раз до окончания заданной программы движения исполнительного органа.
Использование блока коррекции в устройстве для автоматического управления исполнительным органом горного комбайна по сравнению с известным обеспечивает следующие преимущества: обеспечение высокой точности проведения выработки, увеличение производительности и уменьшение трудозатрат проведения выработок.
Обеспечение высокой точности проведения выработок осуществляется за счет автоматической коррекции в устройстве.автоматического управления стреловым исполнительным органом сигналов заданного положения исполнительного органа относительно фактического положения выработки и корпуса комбайна во время его работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления стреловидным исполнительным органом горного комбайна и устройство для его осуществления | 1986 |
|
SU1492045A1 |
| Устройство для автоматического управления стреловидным исполнительным органом горного комбайна | 1966 |
|
SU699178A1 |
| Способ управления стреловым исполнительным органом горнопроходческого комбайна | 1985 |
|
SU1285149A1 |
| Система автоматического управления очистным комбайном в профиле пласта | 1986 |
|
SU1423738A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ИЗБИРАТЕЛЬНОГО ДЕЙСТВИЯ ГОРНОПРОХОДЧЕСКОГО КОМПЛЕКСА | 2007 |
|
RU2360111C2 |
| Способ программного управления очистным комбайном в профиле пласта | 1990 |
|
SU1756557A1 |
| Способ программного управления угледобывающим комбайном и система для его осуществления | 1984 |
|
SU1250651A1 |
| Способ управления очистным комбайном и устройство для его осуществления | 1990 |
|
SU1809042A1 |
| Устройство автоматического программного управления исполнительными органами угледобывающего комбайна по гипсометрии пласта | 1972 |
|
SU883418A1 |
| Способ программного управления очистным комбайном,работающим со става конвейера,и система программного управления очистным комбайном | 1984 |
|
SU1236103A1 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТРЕЛОВИДНЫМ ИСПОЛНИТЕЛЬНЫМ ОРГАНОМ ГОРНОГО КОМБАЙНА, содержащее датчики горизонтального и вертикального перемещения исполнительного органа, исполните:г1ьные элементы, генератор сдвигающих импульсов, ключ с управляющими входами, двоичный счетчик, дешифратор, блок ячеек выбора программ, блоки заданий программ, блоки ячеек сравнения и направления движения, причем двоичный счетчик соединен с дешифратором непосредственно и с генератором сдвигающих импульсов через ключ, управляющие входы которого подклю- , чены к выходам блоков ячеек сравнения и направления движения, а выхо-ды дешифратора соединены с .входами -, ячеек блока выбора программ, выходы которых подключены к входам блоков задания программ, выходы датчиков горизонтального и вертикального перемещения исполнительного органа подключены к одним входам ячеек соответствующих блоков сравнения. и направления движения, отличающееся тем, что, с целью по-вьшения точности проведения выработок по заданному направлению, в него введен блок коррекции, состоящий из триггера коррекции, регистров коррекции горизонтального и вертикального перемещений, сумматоров горизонтгшьного и вертикального перемещений, переключателей горизон- , тальной и вертикальной коррекции и i блоков задания горизонтального и вертикального направлений выработW ки, причем выход триггера коррекции соединен с входами регистров коррекции горизонтального и вертикального перемещений, к другим входам которых подключены выходы переключате- . лей горизонтальной и вертикальной коррекции и выходы блоков задания горизонтального и вертикального направлений выработки, а к выходам - , входы сумматоров горизонтального и вертикального перемещений, к другим входам которых подключены выходы блоков задания программ, при этом выходы сумматоров горизонтального и вертикального перемещений соедине со ны с другими входами блоков ячеек сравнения и направления движения.
Гг/
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ПРОХОДЧЕСКИЙ КОЛ1БАЙН | 0 |
|
SU179717A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для автоматического управления стреловидным исполнительным органом горного комбайна | 1966 |
|
SU699178A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
