г
16
и
J7 -Г5
Щ
W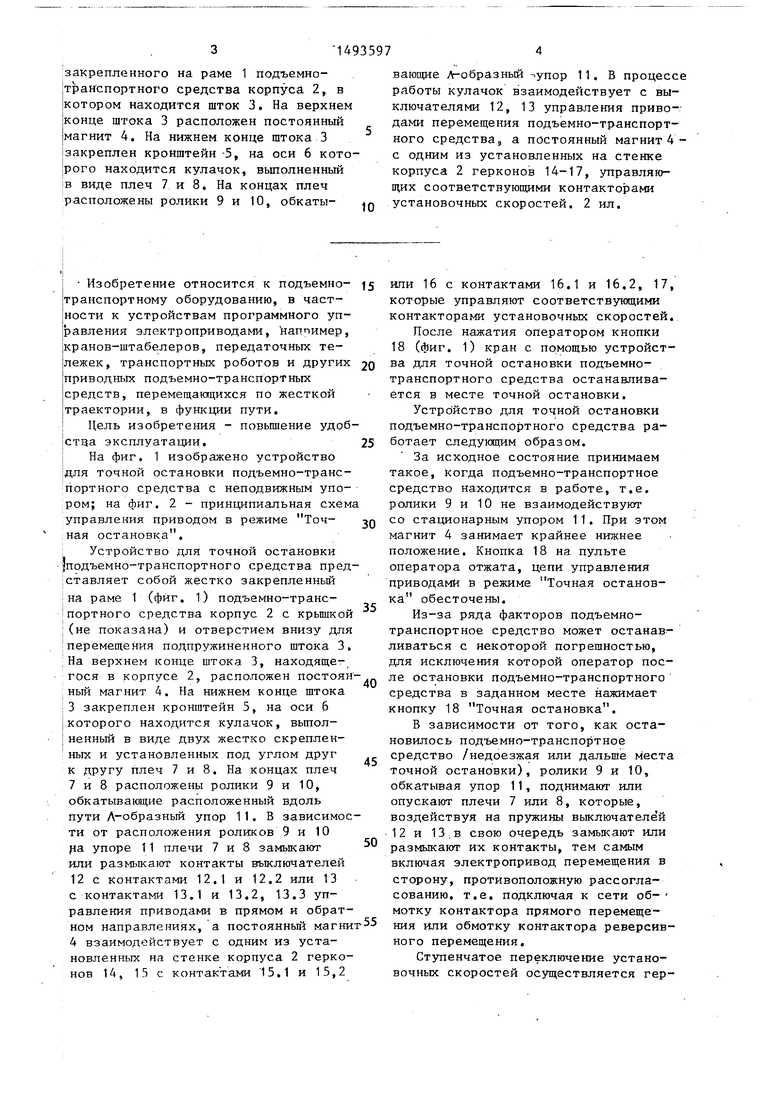
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для точной остановки подъемно-транспортного механизма | 1986 |
|
SU1312052A1 |
| Устройство для точной остановки подъемно-транспортного средства | 1985 |
|
SU1301766A2 |
| Устройство для формирования сигналов анормальных состояний лифта и питания его электропривода | 1983 |
|
SU1320159A1 |
| Устройство для точной остановки подъемно-транспортного средства | 1982 |
|
SU1054278A1 |
| СПОСОБ РАБОТЫ ПОРШНЕВОЙ ГИБРИДНОЙ ЭНЕРГЕТИЧЕСКОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2658715C2 |
| Устройство для точной остановки подъемно-транспортного средства | 1983 |
|
SU1133220A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГРУЗОНОСИТЕЛЕМ | 1991 |
|
RU2006435C1 |
| Устройство для управления грузоносителем | 1980 |
|
SU912611A1 |
| Вспомогательный привод механического пресса | 1980 |
|
SU948689A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОДЪЕМНО-ТРАНСПОРТНОЙ МАШИНОЙ | 1996 |
|
RU2112735C1 |
Изобретение относится к устройствам управления подъемно-транспортными средствами, например кранами-штабелерами, транспортными роботами, перемещающимися по жесткой траектории. Цель изобретения - повышение удобства эксплуатации. Устройство для точной остановки подъемно-транспортного средства состоит из жестко закрепленного на раме 1 подъемно-транспортного средства корпуса 2, в котором находится шток 3. На верхнем конце штока 3 расположен постоянный магнит 4. На нижнем конце штока 3 закреплен кронштейн 5, на оси 6 которого находится кулачок, выполненный в виде плеч 7 и 8. На концах плеч расположены ролики 9 и 10, обкатывающие Л-образный упор 11. В процессе работы кулачок взаимодействует с выключателями 12, 13 управления приводами перемещения подъемно-транспортного средства, а постоянный магнит 4 - с одним из установленных на стенке корпуса 2 герконов 14-17, управляющих соответствующими контакторами установочных скоростей. 2 ил.
///// ////// / f
Нестояючногсосяанова
ФагЛ
4 СО 00 СП СО
закрепленного на раме 1 подъемно- транспортного средства корпуса 2, в котором находится шток 3. На верхнем конце штока 3 расположен постоянный магнит 4, На нижнем конце штока 3 закреплен кронштейн -5, на оси 6 кото- iporo находится кулачок, вьшолненный в виде плеч 7 и 8. На концах плеч расположены ролики 9 и 10, обкаты-
Изобретение относится к подъемно- транспортному оборудованию, в частности к устройствам программного управления электроприводами, наппимер, кранов-штабелеров, передаточных тележек, транспортных роботов и других приводных подъемно-транспортных средств, перемещающихся по жесткой траектории, в функции пути.
Цель изобретения - повьш1ение удобства эксплуатации.
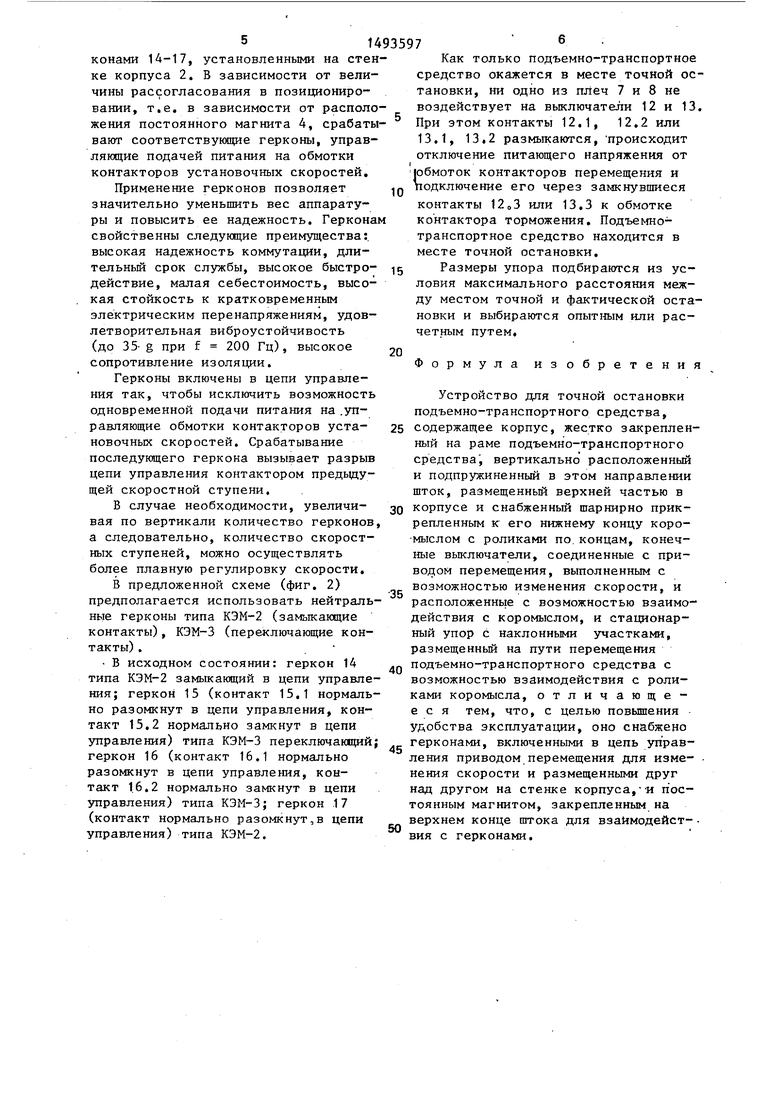
На фиг. 1 изображено устройство для точной остановки подъемно-транспортного средства с неподвижным упором; на фиг, 2 - принципиальная схема
.,
управления приводом в режиме Точная остановка.
Устройство для точной остановки |подъемно-транспортного средства предоставляет собой жестко закрепленньм I на раме Г (фиг. 1) подъемно-транс портного средства корпус 2 с крьшкой ;(не показана) и отверстием внизу для перемещения подпружиненного штока 3, На верхнем конце штока 3, находящегося в корпусе 2, расположен постоянный магнит 4. На нижнем конце штока
3закреплен кронштейн 5, на оси 6 которого находится кулачок, выполIненный в виде двух жестко скрепленных и установленных под углом друг к другу плеч 7 и 8. На концах плеч 7 и 8 расположены ролики 9 и 10, обкатывающие расположенный вдоль пути Л-образный упор 11. В зависимости от расположения роликов 9 и 10 fia упоре 11 плечи 7 и 8 замыкают или размыкают контакты выключателей 12 с контактами 12.1 и 12.2 или 13 с контактами 13,1 и 13.2, 13,3 управления приводами в прямом и обратном направлениях, а постоянньй магни
4взаимодействует с одним из установленных на стенке корпуса 2 герконов 14, 15с контактами 15.1 и 15,2
вающие л-образный упор 11. В процессе работы кулачок взаимодействует с выключателями 12, 13 управления приводами перемещения подъемно-транспортного средства, а постоянный магнит 4 с одним из установленных на стенке корпуса 2 герконов 14-17, управляющих соответствующими контакторами установочных скоростей. 2 ил.
15 20
25
а
35
т
30
40
45
50
55
ипи 16 с контактами 16.1 и 16.2, 17, которые управляют соответствующими контакторами установочных скоростей.
После нажатия оператором кнопки 18 (фиг, 1) кран с помощью устройства для точной остановки подъемно- транспортного средства останавливается в месте точной остановки.
Устройство для точной остановки подъемно-транспортного средства работает следующим образом.
За исходное состояние принимаем такое. Когда подъемно-транспортное средство находится в работе, т.е. ролики 9 и 10 не взаимодействуют со стационарным упором 11. При этом магнит 4 занимает крайнее нижнее положение. Кнопка 18 на пульте оператора отжата, цепи управления приводами в режиме Точная остановка обесточены.
Из-за ряда факторов подъемно- транспортное средство может останав ливаться с некоторой погрешностью, для исключения которой оператор после остановки подъемно-транспортного средства в заданном месте нажимает кнопку 18 Точная остановка.
В зависимости от того, как остановилось подъемно-транспортное средство /недоезжая или дальше места точной остановки), ролики 9 и 10, обкатывая упор 11, поднимают или опускают плечи 7 или 8, которые, воздействуя на пружины вьжлючателёй 12 и 13.в свою очередь замыкают или размыкают их контакты, тем самым включая электропривод перемещения в сторону, противоположную рассогласованию, т.е. подключая к сети об- мотку контактора прямого перемещения или обмотку контактора реверсивного перемещения.
Ступенчатое переключение установочных скоростей осуществляется гер
5U
конами 14-17, установленными на стенке корпуса 2. В зависимости от величины рассогласования в позиционировании, т.е. в зависимости от расположения постоянного магнита 4, срабатывают соответствуюпще герконы, управляющие подачей питания на обмотки контакторов установочных скоростей.
Применение герконов позволяет значительно уменьшить вес аппаратуры и повысить ее надежность. Геркона свойственны следунщие преимущества:, высокая надежность коммутации, длительный срок службы, высокое быстродействие, малая себестоимость, высокая стойкость к кратковременным электрическим перенапряжениям, удовлетворительная виброустойчивость (до 35- g при f 200 Гц), высокое сопротивление изоляции.
Герконы включены в цепи управления так, чтобы исключить возможность одновременной подачи питания на .управляющие обмотки контакторов установочных скоростей. Срабатывание последующего геркона вызывает разрыв цепи управления контактором предьщу- щей скоростной ступени.
В случае необходимости, увеличивая по вертикали количество герконов а следовательно, количество скоростных ступеней, можно осуществлять более плавную регулировку скорости.
В предложенной схеме (фиг, 2) предполагается использовать нейтральные герконы типа КЭМ-2 (замыкающие контакты), КЭМ-3 (переключающие контакты) .
В исходном состоянии: геркон 14 типа КЭМ-2 замыкающий в цепи управления; геркон 15 (контакт 15.1 нормально разомкнут в цепи управления, контакт 15.2 нормально замкнут в цепи
управления) типа КЭМ-3 переключающий; герконами, включенными в цепь управгеркон 16 (контакт 16.1 нормально разомкнут в цепи управления, контакт 1.6.2 нормально замкнут в цепи управления) типа КЭМ-3; геркон 17 (контакт нормально разомкнут,в цепи управления) типа КЭМ-2.
50
ления приводом перемещения для изменения скорости и размещенными друг над другом на стенке корпуса,--и п ос- тоянным магнитом, закрепленным на верхнем конце штока для взаИмодейст ВИЯ с герконами.
0
5
0
Как только подъемно-транспортное средство окажется в месте точной остановки, ни одно из плеч 7 и 8 не воздействует на выключатели 12 и 13. При зтом контакты 12.1, 12.2 или 13.1, 13,2 размыкаются, происходит отключение питающего напряжения от
юбмоток контакторов перемещения и подключение его через замкнувшиеся
контакты 12,3 или 13,3 к обмотке контактора торможения. Подъемно- транспортное средство находится в месте точной остановки.
Размеры упора подбираются из условия максимального расстояния между местом точной и фактической остановки и выбираются опытным или расчетным путем.
Формула изобретения
5
0
5
0
Устройство для точной остановки подъемно-транспортного средства, содержащее корпус, жестко закрепленный на раме подъемно-транспортного средства, вертикально расположенный и подпружиненный в этом направлении шток, размещенный верхней частью в корпусе и снабженный шарнирно прикрепленным к его нижнему концу коро- мыслом с роликами по. концам, конечные выключатели, соединенные с приводом перемещения, выполненным с возможностью изменения скорости, и расположенные с возможностью взаимодействия с коромыслом, и стационарный упор с наклонными участками, размещенный на пути перемещения подъемно-транспортного средства с возможностью взаимодействия с роликами коромысла, отличающееся тем, что, с целью повышения удобства эксплуатации, оно снабжено
герконами, включенными в цепь управ50
ления приводом перемещения для изменения скорости и размещенными друг над другом на стенке корпуса,--и п ос- тоянным магнитом, закрепленным на верхнем конце штока для взаИмодейстВИЯ с герконами.
Ш
J2.2
««
1U
ав.2
Ш
| Устройство для точной остановки подъемно-транспортного средства | 1983 |
|
SU1133220A1 |
| Насос | 1917 |
|
SU13A1 |
| / /(//Л /////////Л(//////////////////// | |||
