113
Изобретение относится к подъемно- транспортному оборудованию, а именно устройствам управления подъемно-транспортными приводными средствами, например кранами-штабелерами, передаточными тележками, транспортными роботами, перемещающимися по жесткой траектории, и может быть использовано во многих отраслях народного хозяйства.
Цель изобретения - повышение надежности .
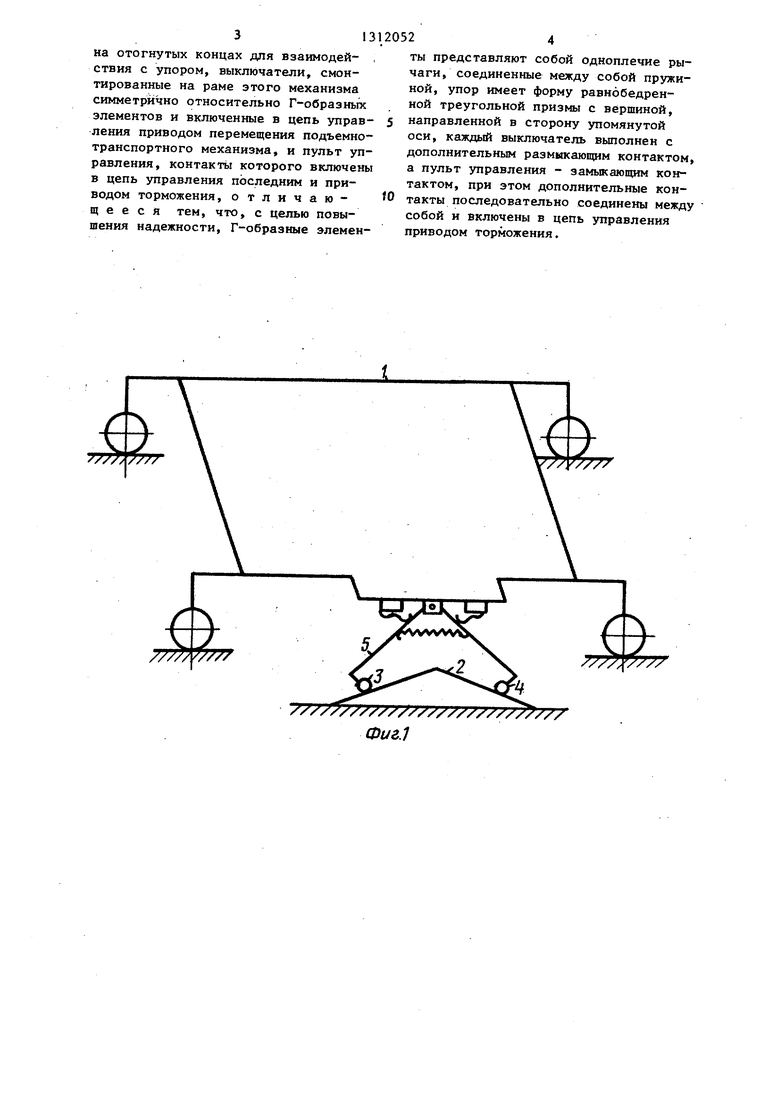
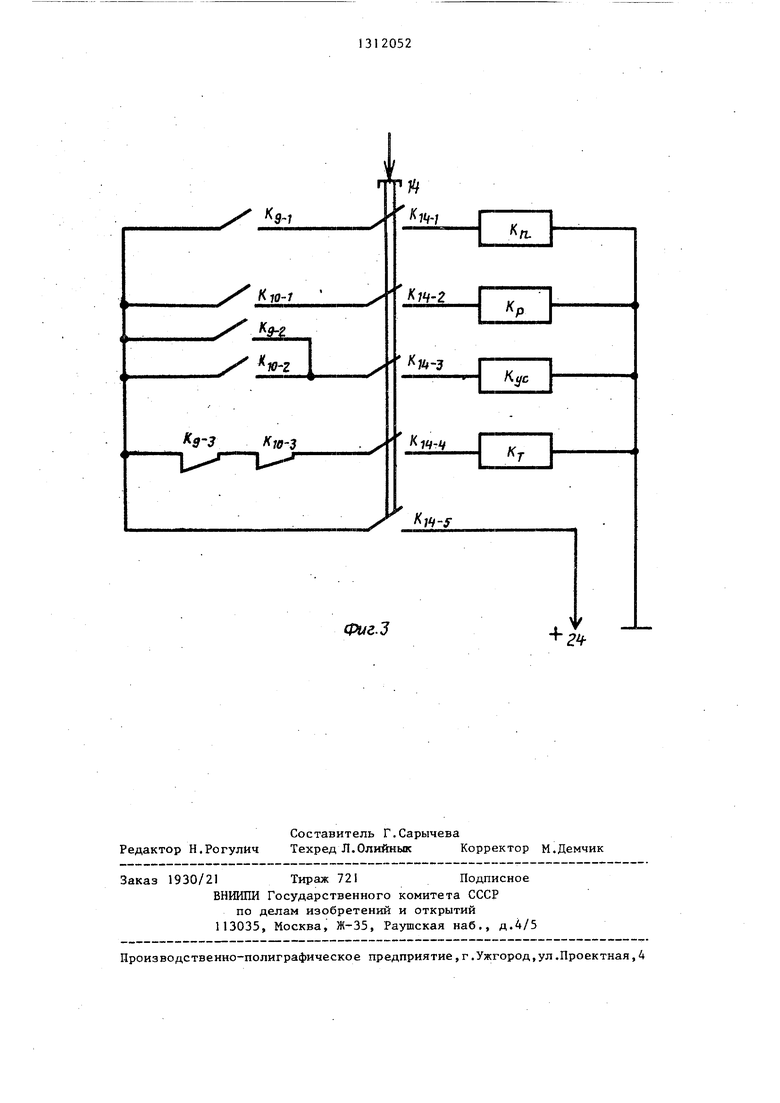
На фиг.1 изображена рама подъемно- транспортного механизма с устройством для точной остановки, общий вид: на фиг.2 - устройство точной остановки с неподвижным упором; на фиг.З - принципиальная электрическая схема управления приводом.
Устройство для точного останова подъемно-транспортного механизма 1 имеет расположенный вдоль пути упор 2 (фиг.1) в форме равнобедренной тре угольной призмы, который обкатывается роликами 3 и 4, расположенными на концах одноплечих Г-образных рычагов 5 и 6, установленных независимо друг от друга на общей оси 7 кронштейна 8 (фиг.2). По обе стороны последнего установлены выключатели 9 и 10. Ролики 3 и 4, обкатьшая упор 2, поднимают или опускают, рычаги 5 и 6, воздействуя ими на пружины II и 12 выключателей 9 и 10, замыкают или размыкают их контакты, управляя приводами механического торможения и перемещения подъемно-транспортного механизма 1 в прямом и реверсивном направлениях. Пружина 13 предохраняет плечи 5 и 6 от случайных подскоков, исключая ложные срабатывания выключателей 9 и 10. Последние выполнены с дополнительными размыкающими контактами. Управление работой устройства осуществляется оператором из кабины с помощью кнопки 14, расположенной на пульте управления (фиг.З), который имеет дополнительные замыкающие контакты, последовательно соединенные с допол нительными размыкающими контактами выключателей 9 и 10.
Устройство работает следующим образом.
За исходное состояние принимаем такое, при котором подъемно-транспортный механизм находится в положении, когда ролики 3 и 4 не взаимодействуют с упором 2. При этом цепи уп5
20522
равления приводами обесточены, кнопка 14 отжата. Упор 2 устанавливается вдоль пути следования подъемно-транспортного механизма 1 в том месте,
которое соответствует его точному позиционированию . При подходе к месту точной остановки транспортный механизм I переходит на малую установочную скорость и затем останавливается. Однако из-за сравнительно большой скорости движения, изменения нагрузки и других факторов подъемно-транс- портный механизм может, например, проехать место точного останова. После точной остановки оператор нажимает на кнопку 14 Точный останов, находящуюся на пульте управления. При наличии рассогласования в точном позиционировании плечо 5 или 6 уст ройства воздействует через пружину 11 или 12 на один из выключателей 9 и 10, включая тем самым электропривод перемещения в сторону, противо, положную рассогласованию, т.е. подключает к сети обмотки контакторов KO или K-.JC К р.
Как только подъемно-транспортный механизм окажется в месте точного останова, не одно из плеч 5 и 6 не воздействует на выключателя 9 и 10. При этом происходит отключение питающего напряжения от обмоток контакторов перемещения (K,jc К и или Кр) и под- клзочение .его к обмотке контактора
5 торможения (К) через нормально замкнутые контакты Kg. )j . Оператор отжимает кнопку 14 пульта управления, подъемно-транспортный механизм находится в заторможенном состоянии точно в заданной позиции останова.
Размеры упора подбираются из условия максимального ошибочного расстояния от места точного останова и выбирается расчетным или опытным пу- .
0
0
5
тем.
50
55
Формула изобретения
Устройство для точной остановки подъемно-транспортного механизма, содержащее упор, расположенный на пути перемещения подъемно-транспортного механизма, прикрепленные с возмож- ностью поворота в вертикальной плоскости посредством оси к раме подъемно-транспортного механизма, симметрично расположенные относительно оси Г-образные элементы с роликами
на отогнутых концах для взаимодей- ствия с упором, выключатели, смонтированные на раме этого механизма симметрично относительно Г-образных элементов и включенные в цепь управления приводом перемещения подъемно- транспортного механизма, и пульт управления, контакть которого включены в цепь управления последним и приводом торможения, отличающееся тем, что, с целью повышения надежности, Г-образные элемен120524
ты представляют собой одноплечие рычаги, соединенные между собой пружиной, упор имеет форму равнобедренной треугольной призмы с вершиной, направленной в сторону упомянутой оси, каждый выключатель выполнен с дополнительным размыкающим контактом, а пульт управления - замыкающим контактом, при этом дополнительные контакты последовательно соединены между собой и включены в цепь управления приводом торможения.
Ю
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для точной остановки подъемно-транспортного средства | 1987 |
|
SU1493597A1 |
| Устройство для точной остановки подъемно-транспортного средства | 1985 |
|
SU1301766A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГРУЗОНОСИТЕЛЕМ | 1991 |
|
RU2006435C1 |
| Устройство для точной остановки подъемно-транспортного средства | 1982 |
|
SU1054278A1 |
| Механизм управления приводом сбрасывателя штучных изделий с подающего органа | 1985 |
|
SU1414734A1 |
| Устройство монтажа и демонтажа дискового питателя | 1983 |
|
SU1157335A1 |
| Устройство для управления грузоносителем | 1990 |
|
SU1787899A1 |
| СТОЯНОЧНАЯ ТОРМОЗНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2213672C2 |
| Устройство для адресования грузо-НОСиТЕля | 1979 |
|
SU812676A1 |
| Устройство для адресования грузоносителя | 1980 |
|
SU931607A1 |
Изобретение относится к области подъемно-транспортного машиностроения . Цель изобретения - повышение на ////////////У///// ---- /VX М /7/ /W йг 7 77/ л/У /// //У ЛУ /ff /х/ дежности. Устройство содержит упор 2, Г-образные одноплечие рычаги 5 и 6, соединенные осью 7, прикрепленной к раме Г подъемно-транспортного механизма, и пружиной 13. Симметрично рычагам 5 и 6 установлены выключатели 9 и 1 Of Упор 2 выполнен в форме равно- бедре.нной треугольной призмы. Выключатели 9 и 10 вьтолнены с дополнительными размыкающими контактами, а пульт управления - с замыкающими контактами, включенными последовательно с дополнительными контактами выключателей 9 и 10 в цепь -управления приводом торможения подъемно-транспортного механизма. При подходе к месту точного останова, когда рычаги 5 и 6 будут расположены Симметрично призме упора 2, они не будут воздействовать на выключатели 9 и 10. При этом произойдет отключение привода перемещения и включение привода торможения. 3 ил. ,/ -- с | (Л со ю о сд ьо 4 Месшо I OC/7KWC фиг.2
/х/х;
vv
Фиг.1
