го
4
о
00 СХ)
о со
314
Изобретение относится к машиностроению, в частности к гидравлическим и пневматическим исполнительным механизмам.
Цель изобретения - расширение функциональных возможностей путем обеспечения двустороннего прерывистого вращения выходного вала и торможения поршней в конце их хода.
На фиг . 1 изображен предлагаемьв моментный гидроцилиндр, продольный разрезу на фиг.2 - сечение А-А на фиг.1.
Моментный гидроцилиндр содержит корпус 1, два рабочих поршня 2 и 3 со штоками 4 и 5, установленные в корпусе 1 с образованием рабочих поршневых и штоковых полостей 6 и 7, каретку 8 с захватами 9, диск 10 с пазами 11, установленный на выходном валу 12.
В торцовых частях корпуса 1 размещены с образованием поршневых камер 13 два демпфирующих поршня 14 и 15 со штоками 16 и 17, установленными во внутренних камерах 18, выполненны в рабочих поршнях 2 и 3. Пазы 11 в диске 10 выполнены таким образом,что
0
захождению захватов 9 в пазы 11 диска 10. Так как правая рабочая штоко- вая полость 7 и внутренняя камера
18рабочего поршня 2 сообщаются между собой, а эффективные рабочие площади штоковых полостей и разгрузочных штоков 16 и 17 демпфируюи их поршней 14 и 15 равны между собой, то при подаче ра.бочей жидкости под давлением в полость 7 рабочий поршень 2 остается в равновесии. Направляющие
19и 20 предохраняют каретку 8 от вращения вокруг осей рабочих поршней 2 и 3 и от удара об диск 10 в случае неодновременного вьщвижения захватов 9. После захождения захватов 9
в пазы 11 с линией нагнетания соединяется рабочая поршневая полость 6, что вызывает перемещение рабочих поршней 2 и 3 вместе с кареткой 8 и захватами 9 до упора в демпфирующие поршни 14 и 15. Поступательное перемещение захватов 9, взаимодействующих 5 С диском 10, преобразуется во вращение выходного вала 12. Разность между усилиями, развиваемыми демпфирующим поршнем 14 и рабочим поршнем 2, представляет собой тормозное усилие.
5
0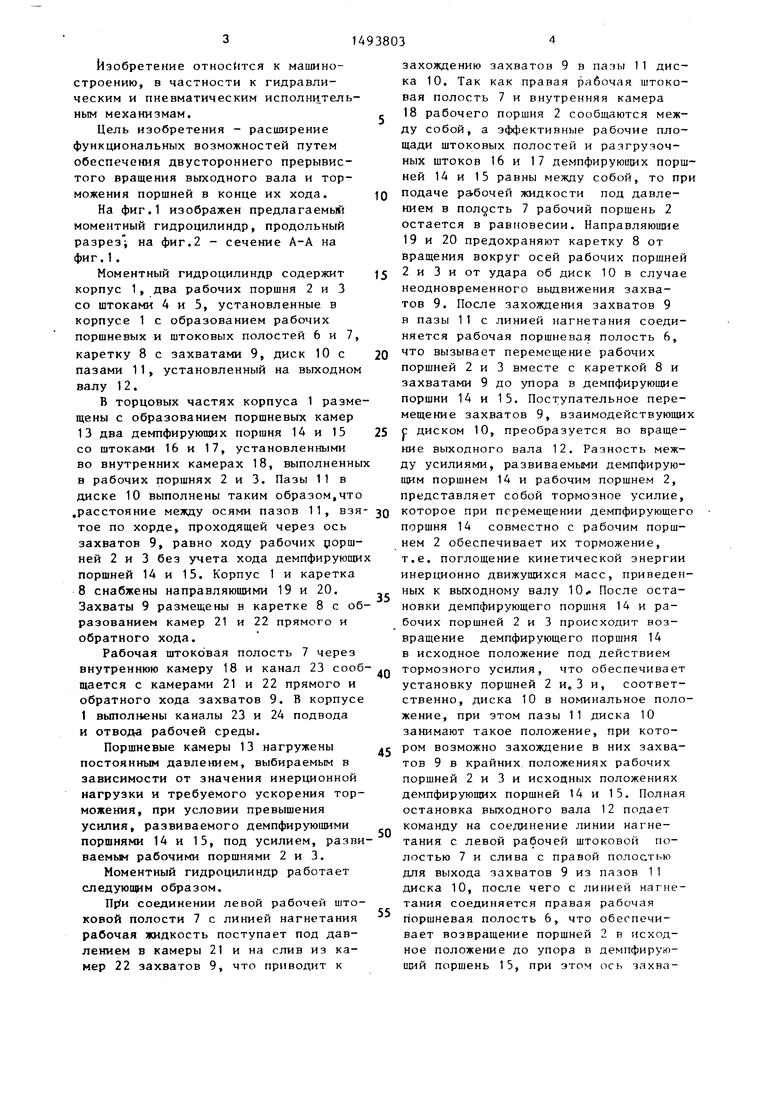

| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2013 |
|
RU2513055C1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
| ГИДРАВЛИЧЕСКАЯ ЛЕБЕДКА | 1993 |
|
RU2048424C1 |
| Протяжной автомат | 1987 |
|
SU1426710A1 |
| Поршневой позиционер | 1989 |
|
SU1620698A1 |
| Машина для сварки трением | 1988 |
|
SU1637982A1 |
| Станок для разборки и сборки диафрагменного узла | 1988 |
|
SU1537551A1 |
| Гидравлический съемник | 1989 |
|
SU1629169A1 |
| Гидравлический привод с рекуперацией энергии торможения | 1978 |
|
SU738920A1 |
Изобретение позволяет расширить функциональные возможности цилиндра путем обеспечения двухстороннего прерывистого вращения выходного вала и торможения поршней в конце их хода. На выходном валу 12 установлен диск с пазами 11, а между штоками 4, 5 рабочих поршней (П) 2, 3 размещена каретка 8 с захватами 9, взаимодействующими с пазами 11 и образующими камеры (К) 21, 22 прямого и обратного хода. Демпфирующее устройство выполнено в виде двух демпфирующих П 14, 15 со штоками, образующих поршневые К 13. П 14, 15 расположены в торцовых частях корпуса 1 во внутренних К, выполненных в П 2, 3. Рабочие штоковые полости сообщены с внутренними К и имеют с ними равные эффективные площади, внутренние К сообщены с К 21, 22, а К 13 - с источником давления. Поступательное перемещение захватов 9, взаимодействующих с диском, преобразуется во вращение вала 12, а разность между усилиями, развиваемыми демпфирующим и рабочим П, является тормозным усилием, к-рое возвращает демпфирующий П в исходное положение. Это обеспечивает установку П 2, 3 и диска в номинальное положение, при к-ром захваты 9 входят в пазы 11 в крайних положениях П 2, 3 и в исходных П 14, 15. 2 ил.
35
40
.расстояние между осями пазов 11, взя- зо которое при перемещении демпфирующего
тое по хорде, проходящей через ось
захватов 9, равно ходу рабочих роршней 2 и 3 без учета хода демпфирующих
поршней 14 и 15. Корпус 1 и каретка
8 снабжены направляющими 19 и 20.
Захваты 9 размещены в каретке 8 с образованием камер 21 и 22 прямого и
обратного хода.
Рабочая штоковая полость 7 через
внутреннюю камеру 18 и канал 23 сообщается с камерами 21 и 22 прямого и
обратного хода захватов 9. В корпусе 1 вьтолнены каналы 23 и 24 подвода
и отвода рабочей среды.
Поршневые камеры 13 нагружены
постоянным давлением, выбираемым в зависимости от значения инерционной нагрузки и требуемого ускорения торможения, при условии превышения усилия, развиваемого демпфирующими поршнями 14 и 15, под усилием, развиваемым рабочими поршнями 2 и 3.
Моментный гидроцилиндр работает следующим образом.
Пр и соединении левой рабочей што- ковой полости 7 с линией нагнетания рабочая жидкость поступает под давлением в камеры 21 и на слив из камер 22 захватов 9, что приводит к
45
50
55
поршня 14 совместно с рабочим поршнем 2 обеспечивает их торможение, т.е. поглощение кинетической энергии инерционно движущихся масс, приведенных к выходному валу 10 После остановки демпфирующего поршня 14 и рабочих поршней 2 и 3 происходит возвращение демпфирующего поршня 14 в исходное положение под действием тормозного усилия, что обеспечивает установку поршней 2 и. 3 и, соответственно, диска 10 в номинальное положение, при этом пазы 11 диска 10 занимают такое положение, при котором возможно захождение в них захватов 9 в крайних положениях рабочих поршней 2 и 3 и исходных положениях демпфирующих поршней 14 и 15. Полная остановка выходного вала 12 подает команду на соединение линии нагнетания с левой рабочей штоковой полостью 7 и слива с правой полостью для выхода захватов 9 из пазов 11 диска 10, после чего с линией нагнетания соединяется правая рабочая поршневая полость 6, что обеспечивает возвращение поршней 2 в исходное положение до упора в демпфирующий поршень 15, при этом ось захна5
0
5
0
5
поршня 14 совместно с рабочим поршнем 2 обеспечивает их торможение, т.е. поглощение кинетической энергии инерционно движущихся масс, приведенных к выходному валу 10 После остановки демпфирующего поршня 14 и рабочих поршней 2 и 3 происходит возвращение демпфирующего поршня 14 в исходное положение под действием тормозного усилия, что обеспечивает установку поршней 2 и. 3 и, соответственно, диска 10 в номинальное положение, при этом пазы 11 диска 10 занимают такое положение, при котором возможно захождение в них захватов 9 в крайних положениях рабочих поршней 2 и 3 и исходных положениях демпфирующих поршней 14 и 15. Полная остановка выходного вала 12 подает команду на соединение линии нагнетания с левой рабочей штоковой полостью 7 и слива с правой полостью для выхода захватов 9 из пазов 11 диска 10, после чего с линией нагнетания соединяется правая рабочая поршневая полость 6, что обеспечивает возвращение поршней 2 в исходное положение до упора в демпфирующий поршень 15, при этом ось захна5
тов 9 совмещается с осью паза 11 в диске 10. Таки возвратно-поступательное поршней преобразуется в вращение выходного вала. Формула изобр
Моментньй гидроцилиндр, содержащий корпус, два рабочих поршня со штоками, установленные в корпусе с образованием рабочих поршневых и штоковых полостей, передаточный механизм, выходной вал, демпфирующие устройства, каналы подвода и отвода рабочей среды и источник давления, отличающийся тем, что, с целью расширения функциональных возможностей, устройство снабжено дыском с пазами, установленньм на
ю
6
выходном валу, и размеэ1енной между штоками кареткой с захватами, взаимодействующими с пазами диска, и образующими камеры прямого и обратного хода, демпфирующее устройство выполнено в виде двух, расположенных в торцовых частях корпуса с возможностью взаимодействия с рабочими
поршнями и образованием поршневых |камер демпфирующих поршней со штоками, установленными в выполненных в рабочих поршнях внутренних камерах, сообщены с рабочими штоковыми полостями, и имеющих с ними равные эффективные площади, при этом внутренние камеры сообщены соответственно с камерами прямого и обратного хода, а поршневые камеры подключены к источнику давления.
| Гидродвигатель | 1977 |
|
SU742631A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
