сл
со со
00
оо сп
11.()Г))1те11Ш 41 iKirii 14/i к мгинииосгрое- ник), а MNR iiHO к is|Hiii()iiiMiiHbiM ирсобра- и)в;по. upaiiui U .ii.iKJiо движения ко в|1а- 1цате, 1Ы1()е. и может iiaiiin примемс кие, в чась мости, в М11ог()11(): ицион||ы. стаиках-автома- гах карусельного типа.
Цель и;(()бретения повышение иадеж- иоети механизма за счет исключения заеданий и ио.юмок при смене позиций ведомого звена.
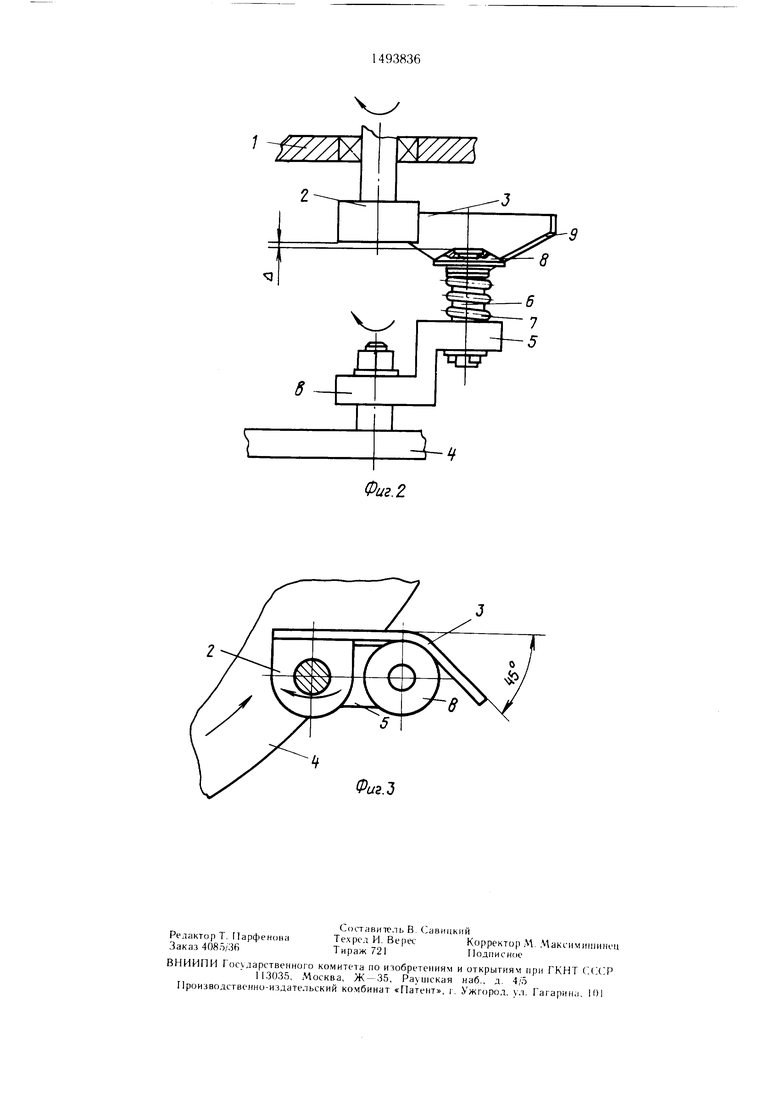
На фиг. 1 показан предлагаемый механизм, общий вид; на фиг. 2 - конструк- пня поводка и ведомого кривоппша; на . 3 - то же, вид сверху.
. Механизм содержит основание 1, установ- .1енный на нем ведущий вал 2, жестко зак- pen. ienHi ni на ва. п 2 кривошип в Еиые поводка Л и устаповленное на основании 1 с возможностью поворота и фиксации про.ме- жуточное звенсз 4, например, в виде кару- ce.ni. На промежуточном звене 4 установ- .лены один n. ui неско, 1ьк() ведомых кривоши- иов о с кривошипными пальцами 6, которые имеют ВОЗМОЖПОСТ1) осевого перемещения в кривошипах 5 и подпружинены к пим пружииа.ми 7. На пальцах 6 установ- .leni.i конусные ролики 8, а поводки 3 выполнены в внде пластин, изогнутых по радиу- с ро.шка 8 ((j)Hr-. 3). На торце иоводка 3, обращенном к ведомому кривошицу 5, симметрично относительно осп изгиба вынол- пены два скоса 9, поверхности которых пара.1. 1ел1)НЫ образующей конической по- ве)хпости ролика 8.
Л еханпзм работает следующим образом.
При зафиксированном в какой-либо рабочей позиции промежуточном звене 4 веду- ший ва,-1 2 через новодок 3, ролик 8 и кривошипный палец () сообщает вращение ведомому кривошипу 5, с которым связана обрабатываемая дета. |ь ( не показана). По окончании операции ведущий вал 2 останав- .швается, а промежуточное звено 4 совершает поворот на заданный угол для перехода в новую )абочую позицию. При этом поводок 3 воздействует свпми скосами на
коническую поверхность ролика 8, который сжимает пружину 7 и вместе с крнвоп ип- ным пальцем 6 смешаются вдоль его оси в сторону ведомого кривошипа 5. Благодаря наличию гарантированного зазора Л между верхним торцом ролика 8 и нижним торцом ведущего вала 2 последний свободно проходит над ролико.м 8 при любом положении поводка 3.
При переходе промежуточного звена 4 в новую рабочую позицию поводок 3 устанавливает ролик 8 уже нового ведомого кривошипа 5, а после прохождения поводка 3 над роликом 8 пружина 7 поднимает ролик 8 и обеспечивает его зацепление с поводком 3, включают привод врашения ведущего вала 2, и в новой позиции промежуточного звена 4 обрабатывается следующая деталь.
Наличие ролика 8 на кривошипном пальце 6 позволяет снизить требования к совмещению осей вращения вала 2 и кривошипа 5, что повышает надежность механизма.
Формула изобретения
Кривошипный меха)1изм передачи вращения, содержащий основание, установленный на нем ведущий вал, жестко закрепленный на валу кривошип в виде поводка, установленное на основании с возможностью поворота и фиксации промежуточное звено и установленный на нем по меньшей мере один ведомый кривошип с подвижным кри- во1иипным пальцем, отличающийся тем, что, с целью повышения надежности, кривошипный палец подпружинен к ведомому кривошипу, механизм снабжен установленным на пальце конусным роликом, предназначенным для взаимодействия с поводком, а поводок выполнен в внде изогнутой ю радиусу ролика пластины, на торце которой, обращенном к ведомому кривошипу, симметрично относительно оси изгиба выполнены два скоса, поверхности которых параллельны образующей конической поверхности ролика.
f9Z/M
| название | год | авторы | номер документа |
|---|---|---|---|
| Мальтийский механизм автооператора | 1985 |
|
SU1273669A1 |
| Рычажно-кулачковый механизм для воспроизведения периодического вращения с постоянной и переменной скоростями | 1977 |
|
SU721626A1 |
| Устройство для правки лезвий безопасных бритв | 1990 |
|
SU1712131A1 |
| Револьверная головка | 1980 |
|
SU994142A1 |
| Манипулятор | 1984 |
|
SU1194673A1 |
| МЕХАНИЗМ ОБЪЕДИНЕННОГО УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА В ДИЗЕЛЬ И РЕВЕРС-РЕДУКТОРОМ | 1970 |
|
SU277446A1 |
| Устройство для подачи деталей | 1981 |
|
SU1018763A1 |
| Устройство к швейной машине для обрезки краев кожподкладки с поднутрением | 1973 |
|
SU525342A1 |
| МЕХАНИЧЕСКАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2007 |
|
RU2334143C1 |
| Предохранительная муфта | 1985 |
|
SU1260576A1 |
Изобретение относится к кривошипным преобразователям вращательного движения во вращательное и может найти применение ,в частности, в многопозиционных станках - автоматах карусельного типа. Цель изобретения - повышение надежности механизма за счет исключения заеданий и поломок при смене позиций ведомого звена. При повороте промежуточного звена 4 из одной рабочей позиции в другую поводок 3 воздействует своими скосами 9 на коническую поверхность ролика 8. Ролик сжимает пружину 7 и вместе с пальцем 6 смещается вдоль его оси, пропуская над собой ведущий вал 2. После прохождения ведущего вала 2 над роликом 8 пружина 7 поднимает ролик и обеспечивает его зацепление с поводком 3. Вращение вала 2 через поводок 3, ролик 8 и палец 6 передается ведомому кривошипу 5. 3 ил.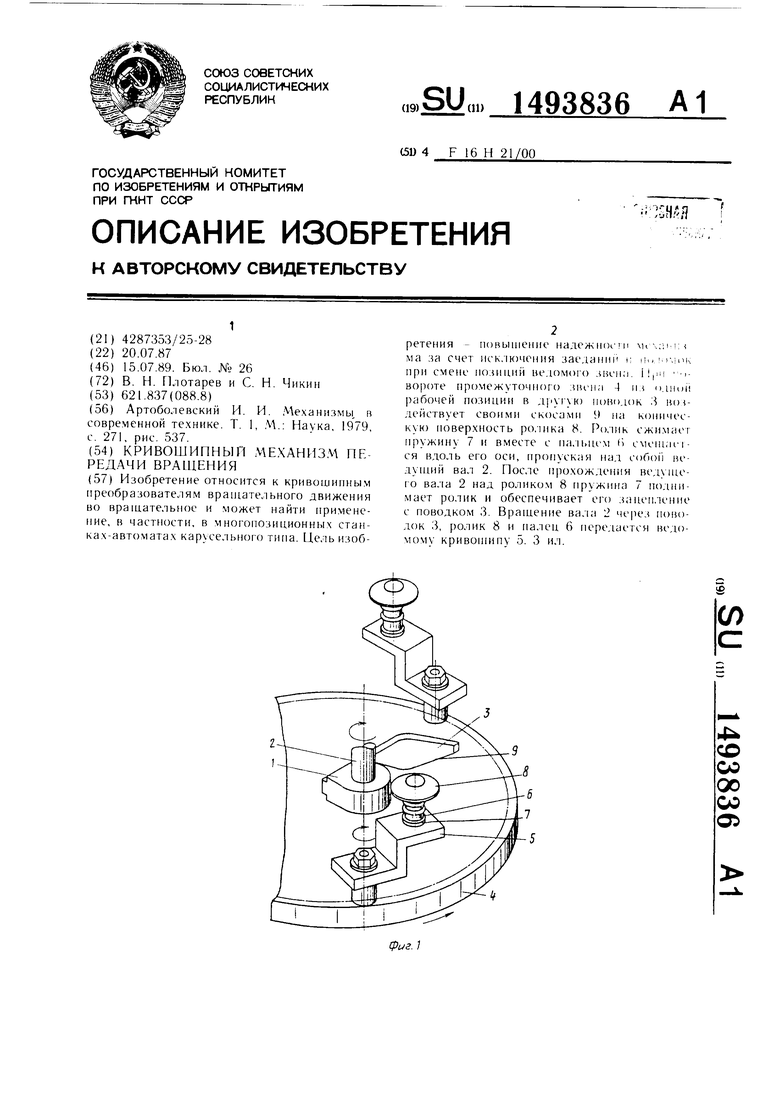
Фиг.З
| Артоболевский И | |||
| И | |||
| совре.менной технике | |||
| Т | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| с | |||
| Искроудержатель для паровозов | 1920 |
|
SU271A1 |
| Кухонный очаг | 1922 |
|
SU537A1 |
