Изобретение относится к механизации и автоматизации обработки металлов давлением и может быть использовано в машиностроении, преимущественно для обслуживания штамповочных прессов. Известно подаюш,ее устройство к прессам, содержаш,ее ползун со схватом, параллелограмм для получения криволинейной траектории схвата, приводимый кривошипно-шатунным механизмом, и кулачковый механизм для вертикального перемеш.ения схватом. Во время вертикальных перемеш.ений параллелограмм должен быть неподвижным, поэтому кривошипно-шатунный механизм приводится в действие периодически (1. Недостатком устройства является низкая производительность из-за наличия кулачкового привода и периодически включаемого кривошипно-ш атунного механизма. Известно также устройство для загрузки деталей, содержащее основной параллелограмм с подвижными и неподвижными шарнирами, выполненный в виде двух поводков одинаковой длины, связанных тягой, схваты деталей к привод 2. Недостатком известного механизма является низкая производительность ввиду периодического характера работы привода. Целью изобретения является повышение производительности устройства для подачи деталей. Поставленная цель достигается тем, что устройство, содержащее основной параллелограмм с подвижными и неподвижными шарнирами, выполненный в виде двух поводков одинаковой длины, связанных тягой, схваты деталей и привод, снабжено допол......„,,,„„...,„„, нительным параллелограммом, выполненным в виде двух одинаковых поводков, шарнирно установленных на поводках основного параллелограмма, и тяги, связанной с поводками и схватами деталей, а также снабжено синхронизирующим параллелограммом, зубчатой передачей, содержащей ведомое зубчатое колесо, жестко связанное с поводком дополнительного параллелограмма и установленное соосно с одним из подвижных шарниров основного параллелограмма, соединяющих поводки основного и вспомогательного параллелограммов, паразитное зубчатое колесо, зубчатое колесо-кривошип, свободно установленное соосно с одним из неподвижных шарниров основного параллелограмм, ведущее зубчатое колесо, жестко связанное с поводком основного параллелограмма и установленное соосно с вторым неподвижным щарниром основного параллелограмма, второе зубчатое колесо-кривощип с неподвижной осью, шатун, соединяющий зубчатые колеса-кривощипы, при этом
привод выполнен в виде крившипно-шатун-55 ричная траектория движения схвата, т. е.
ного механизма.необходим одинаковый закон движения
На фиг. 1 показано устройство, первыйсхвата вперед и назад, то отношение числа
вариант; на фиг. 2 - расположение обоихзубьев колеса 18 к числу зубьев колеса 19 зубчатых колес-кривошипов и шатуна, соединяюш,его их кривошипы, в одном из крайних положений поводков основного параллелограмма; на фиг. 3 - устройство, второй вариант, на фиг. 4 - траектория движения схвата деталей. Поводки 1 и 2 (фиг. 1) одинаковой длины соединены тягой 3, причем расстояние между осями неподвижных шарниров поводков 1 и 2 выполнено равным длине тяги 3, т. е. поводки 1 и 2 совместно с тягой 3 и корпусом устройства образуют основной параллелограмм. Поводок 1 имеет дополнительное плечо 4, а поводок 2 - дополнительное плечо 5 одинаковой длины с плечом 4. Дополнительные плечи 4 и 5 соединены тягой б, образуя синхронизируюш.ий параллелограмм. На поводках 1 и 2 шарнирно установлен дополнительный параллелограмм, содержащий два поводка одинаковой длины, соединенные тягой 9. На продолжении тяги 9 установлен схват (схваты) 10 деталей. Поводки 7 и 8 имеют дополнительные плечи одинаковой длины соответственно 11 и 12, соединенные тягой 13. Плечи 11 и 12 совместно с тягой 13 образуют второй синхронизирующий параллелограмм. На оси шарнира, соединяющего поводки 1 и 7 установлено ведомое зубчатое колесо 14, жестко соединенное с поводком 7 вспомогательного параллелограмма. На оси неподвижного шарнира поводка 1 свободно установлено зубчатое колесокривошип 15 с расположенным на нем кривошипом 16. Между зубчатым колесом 14 и зубчатым колесом-кривошипом 15 установлено паразитное зубчатое колесо 17. На оси неподвижного шарнира поводка 2 установлено ведущее колесо 18, жестко связанное с поводком 2. Зубчатое колесо 18 зацеплением связано с вторым зубчатым колесом-кривошипом 19, на котором расположен кривошип 20. Кривошипы 16 и 20 связаны щатуном 21. Тяга 3 основного параллелограмма через шатун 22 шарнирно связана с кривошипом 23, расположенным на зубчатом колесе 24. Последнее зацеплением связано с зубчатым колесом 25, установленным на кривошипном валу пресса (не показан). Отношение числа зубьев колеса 25 к числу зубьев колеса 24 равно двум. На продолжении поводков 1 и 2 установлены противовесы 26, а на продолжении поводков 7 и 8 - противовесы 27. Величина Е эксцентриситета кривошипа 23 должна быть выполнена 2-2,1 раза меньшей, чем длина поводков 1 и 2, что обеспечивает угол размаха л (угол между крайними положениями этих поводков порядка 180-190°). Если необходима симметдолжно составлять ,..При этом в крайних положениях поводков 1 и 2 радиус, соединяющий центр колеса-кривошипа 15 (фиг. 2) с центром кривошипа 16, и радиус, соединяющий центр колеса-кривошипа 19 с центром кривошипа 20, расположены перпендикулярно к прямой, проходящей через центры колеса-кривошипа 19 и кривощипа 20, расположены перпендикулярно к прямой, проходящей через центр колеса-кривошипа 19 и центр кривошипа 16. Отношение числа зубьев колеса-кривошипа 15 к числу зубьев колеса 14 должно быть равным 1 + 1/2, а отношение эксцентриситета Г кривощипа 16 к эксцентриситету Ej кривошипа 20 должно быть в пределах 4-4,5. Устройство во втором варианте (фиг. 3) содержит те же элементы 1-27 и отличается от первого тем, что снабжено дополнительно мальтийским механизмом. Ведущее звено 28 мальтийского механизма установлено на кривошипном валу пресса, а четырехпазовый крест 29 этого механизма жестко связан с зубчатым колесом 25. На ведущем звене 28 установлены два пальца 30, взаимодействующие с пазами креста 29. Отношение числа зубьев колеса 25 к числу зубьев колеса 24 в этом варианте устройства равно четырем. При входе (выходе) пальцев 30 в па креста 29 кривошип 23 должен быть установлен под углом «г 30-50° относительно его верхнего положения. Устройство работает следующим образом. При вращении кривошипного вала пресса вращательное движение передается зубчатому колесу 24 с кривошипом 23. Тяга 3 под действием кривошипа 23 и шатуна 22 перемещается по траектории, определяемой поводками 1 и 2, т. е. траектории, близкой к полукругу. При этом зубчатое колесо 18 приводит в возвратно-поступательное движение зубчатое колесо-кривошип 19, а последнее через кривошип 20, шатун 21 и кривошип 16 приводит в возвратно-вращательное движение зубчатое колесо-кривошип 15. Последнее в свою очередь через паразитное колебо 17 приводит зубчатое колесо 14, а вместе с ним и поводки 7 и 8 в возвратновращательное движение относительно поводка 1. Кроме того, при движении поводка 1 паразитное колесо 17 обкатывается по зубчатому колесу-кривошипу 15 и этим дополнительно врашает зубчатое колесо 14 с поводком 7. В результате движений поводков 1 и 2 основного параллелограмма и поводков 7 и 8 дополнительного параллелограмма схват 10 совершает плоскопараллельное движение по определенной траектории. На фиг. 4 показана траектория перемещения схвата 10, а также положения поводков 2 и 8 при следующих параметрах звеньев устройства: отнощение длины поводков 1 и 2 к величине эксцентриситета Е| кривошипа 23 равно двум, отношение длины шатуна 22 к ( равно 15,01 187°30, отношение числа зубьев колеса-кривошипа 15 к числу зубьев колеса 14, равно 1,96 отношение числа зубьев колеса 18 к числу зубьев колеса-кривошипа 19 равно 1,92, отношение эксцентриситета 1 к эксцентриситету Bj равно 4,2, длина поводков 1 и 2 185 мм, а длина поводков 7 и 8 115 мм. На фиг. 4 по оси X показаны координаты схвата в горизонтальном направлеНИИ, а по оси Y - в вертикальном направлении. Координаты схвата по осям X и Y подсчитываются по следующим выражениям X l.,85sinif-f- l,15sin Y(l,96-U-f -., у l,85cosy-l,15cos r (1,96-1) Ч-т, де урол поворота поводков 1 и 2 от их среднего положения; S - угол дополнительного поворота поводков 7 и 8 от зубчатого колеса 18, через элементы 19,20, 21, 16, 15, 17 е, sin 1,92 Т «Г 1,96 arcsin-. Действие устройства во втором варианте отличается от первого тем, что зубчатое колесо 25 приводится от кривошипного вала пресса через мальтийский механизм. Устройство в этом случае работает периодически. При подходе ползуна пресса к его нижнему положению схваты 10 совместно с тягой 9 останавливаются в положении несколько сдвинутом относительно их среднего положения (середины траектории). Этот сдвиг зависит от величины угла с . Сдвиг нужен для того, чтобы направление движения схватов в начальном моменте (т. е. .. .. влево или вправо от среднего положения) было определенным. При применении двухпальцевого четырехпазового мальтийского механизма цикл движения схватов совершается за полоборота кривошипного вала пресса. Может быть использован также двух пальцевый трехпазовый мальтийский механизм при отношении числа зубьев колеса 25 к числу зубьев колеса 24 равным трем. В этом случае движение схватов осуществляется за 2/3 оборота кривощипного вала пресса, однако величина хода ползуна пресса должна быть больще, так как пуансон (щтамп не показан) может препятствовать движению схватов, Устройство обеспечивает траекторию движения схвата, необходимую для загрузки в штамп, например, из кассеты или для снятия детали со штампа с одновременной загрузкой в кассету или на транспортное устройство, так как в начале и в конце траектории имеется участок, близкий к вертикальному. Первый вариант устройства предназначен для обслуживания однопозиционного штампа и может быть использован
для одной операции: или для загрузки деталей в штамп, или для снятия их со штампа. В многопозициониом штампе для переноса деталей с одной позиции штампа на другую этот вариант устройства может быть использован лишь в отдельных случаях, когда деталь может быть взята за края, находящиеся вне штампа, т. е. когда схваты устройства вхолостую могут перемеш,аться во время нахождения пуансона штампа в нижией части пути.
гб /5 16 t П 1 /J
Второй вариант устройства предназначен для переноса деталей с одной позиции на другую в многопозицйонных штампах, а также для одновременной загрузки деталей на первую позицию штампа и для снятия деталей с последней позиции штампа.
В устройстве отсутствуют ударные нагрузки, поэтому оно может работать на высоких режимах, особенно первый вариант устройства.
19
W
30 W
Фиг. 2 27 /Z

| название | год | авторы | номер документа |
|---|---|---|---|
| Погрузчик для сельскохозяйственных продуктов | 1986 |
|
SU1326517A1 |
| ЗУБЧАТО-РЫЧАЖНЫЙ МЕХАНИЗМ С ПЕРИОДИЧЕСКИМИ ОСТАНОВКАМИ В.И. ПОЖБЕЛКО | 2003 |
|
RU2252350C1 |
| Зубчато-рычажное устройство | 1982 |
|
SU1087723A1 |
| Грейферный механизм для киноаппарата | 1975 |
|
SU540243A1 |
| Штамповочный автомат | 1981 |
|
SU1008007A1 |
| Манипулятор | 1984 |
|
SU1194673A1 |
| Устройство для многострунной резки и укладки изделий из мерного бруса | 1987 |
|
SU1500479A1 |
| Пульсирующий конвейер с регулируемым шагом | 1981 |
|
SU988691A1 |
| Вибратор маятниковый универсальный для электрохимической обработки | 2020 |
|
RU2761925C1 |
| Транспортирующее устройство для подачи деталей | 1977 |
|
SU632622A1 |

УСТРОЙСТВО ДЛЯ ПОДАЧИ ДЕТАЛЕЙ, содержащее основной параллелограмм с подвижными и неподвижными шарнирами, выполненный в виде двух поводков одинаковой длины, связанных тягой, схваты деталей и привод, отличающееся тем, что, с целью повышения производительности, оно снабжено дополнительным параллелограммом, выполненным в виде двух одинаковых поводков, шарнирно установленных на поводках основного параллелограмма, и тяги, связанной с поводками и схватами деталей, а также снабжено синхронизирующим параллелограммом, зубчатой передачей, содержащей ведомое зубчатое колесо, жестко связанное с поводком дополнительного параллелограмма и установленное соосно с одним из подвижных щарниров основного параллелограмма, соединяющих поводки основного и вспомогательного параллелограммов, паразитное зубчатое колесо, зубчатое колесо-кривощип, свободно установленное соосно с одним из неподвижных шарниров основного параллелограмма, ведущее зубчатое колесо, жестко связанное с поводком основного параллелограмма и установленное соосно с вторым неподвийным шарниром основного параллелограмма, второе зубчатое колесо - кривошип с неподвижной осью, шатун, соединяющий зуб(Л чатые колеса-кривошипы, при этом привод выполнен в виде кривошипно-Шатунного механизма. сх 05 СО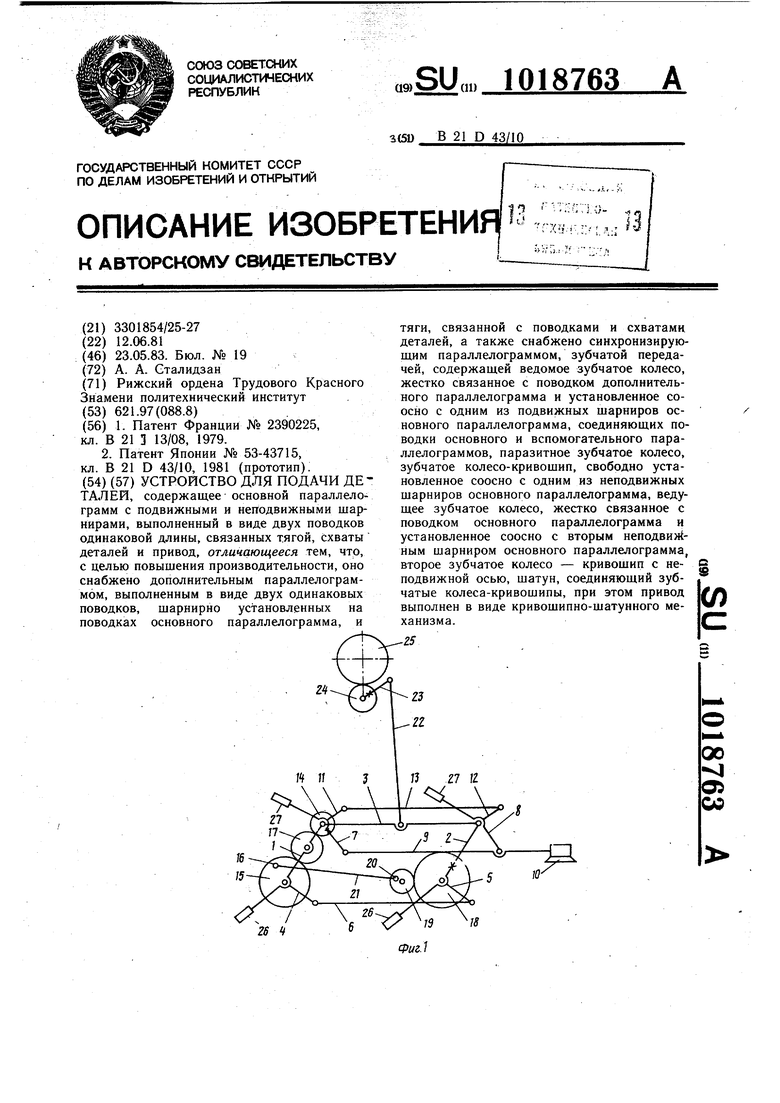
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ПРОИЗВОДСТВА АРОМАТИЗИРОВАННОГО ТОПИСОЛНЕЧНО-ЯБЛОЧНОГО НАПИТКА | 2009 |
|
RU2390225C1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Веникодробильный станок | 1921 |
|
SU53A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
