со
Слд СО
со
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления периодическим процессом ферментации | 1989 |
|
SU1671694A2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 2002 |
|
RU2234116C1 |
| Следящая система | 1979 |
|
SU822148A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Система автоматического управления периодическим процессом ферментации | 1987 |
|
SU1413135A1 |
| Нелинейная следящая система | 1989 |
|
SU1615672A1 |
| Следящая система | 1979 |
|
SU834668A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2150726C1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
Изобретение относится к автоматическому регулированию, может быть использовано при создании высококачественных систем стабилизации координат объекта регулирования. Цель изобретения - повышение быстродействия и качества стабилизации объекта первого порядка при компенсации действия скачкообразных возмущений во всем возможном диапазоне их изменения. Система стабилизации содержит сумматоры 1, 5, усилители 2, 6, объект 3 регулирования, модель 4 объема регулирования, дифференциатор 7, релейный элемент 8 с зоной нечувствительности, задатчик 9 входного сигнала, нелинейное звено 10 с характеристикой антилогарифмического типа. Использование данной системы стабилизации позволяет сократить длительность протекания переходных процессов и повысить качество регулирования. 2 ил.
qjuc .i
31493979
ИзоГфетение относится к автомати-ностн b релейного элемента 8, Цепь
ческому регулированию, может бытьгибкой обратной связи разрыв ается.
Для объекта регулирования первого порядка с передаточной функцией
10
использовано при создании высокока- честве)1ных систем стабилизации коор- дина т объекта регулирования, и является усовершенствованием изобретения по авт.св. № 1272307.
Цель изобретения - повышение быстродействия и качества стабилизации объекта первого порядка при компенсации действия скачкообразных воз(ущений во всем возможном диапазоне их изменения.,, /
,, , ,где W.,(.p) - передаточная функция усиНа фиг.1 представлена структурная 15 vj j
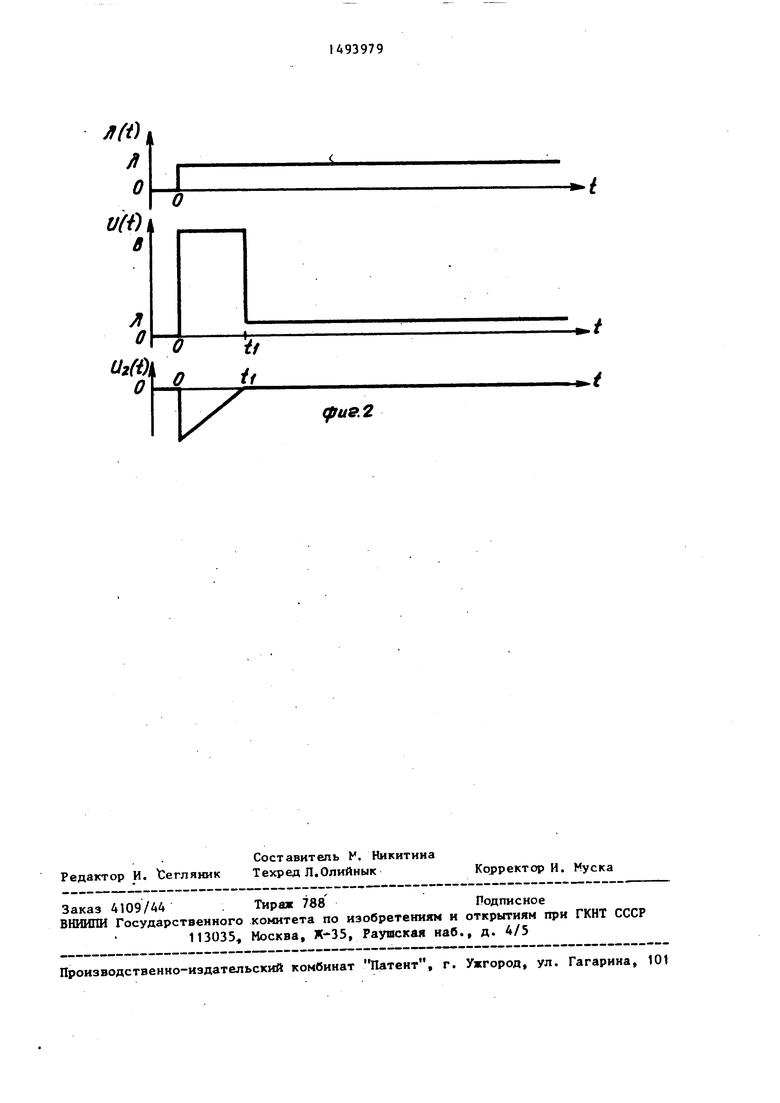
схема системы стабилизации;на фиг.2 - временные диаграммы сигналов на входе и выходе объекта регулирования.
Система стабилизации содержит (фиг.1 ) первый сумматор 1, первый20
усилитель 2, объект 3 регулирования, модель 4 объекта регулирования, второй сумматор 5, второй усилитель 6, дифференциатор 7, релейный элемент 8 с зоной нечувствительности, задат- чик 9 в 4одного сигнала, нелинейное
-звено 10 с характеристикой антилогарифмического типа.
Система стабилизации работает следующим образом.30
При отсутствии возмуще1шя выходной сигнал и7 стабилизируется на заданном уровне, определяемом сигналом задания Uo с выхода задатчика 9 и статическими параметрами системы. Сигна- $5 да в цепи гибкой обратной связ и нет. При появлении возмущения Я на выхо- да второго сумматора 5 появляется сигнал , равный возмущению / . Сигнал через нелинейное звено 10 поступа-40 ет на вход реального дифференцир ую- в щего звена 7. Далее продифференцированный сигнал о(. поступает на вход релейного элемешта 8 с зоной нечувствительности. Если сигнал oi превышает 45 зону нечувствительности b, - на выходе релейного элемента появляется сигнал производной ft максимальной возможной амплитуды В, ограничиваемой
лишь напряжением насыщения элементов 50 ° должен быть равен нулю, системы. Сигнал производной такойР- и В Д , что характерно для
формы оказывает эффективное воздействие на после дующие элементы системы и объект, что значительно ускоряет
процесс регулирования. В процессе55 амплитуде (козффициентом форсировки
регулирования, по достижении выходной 5-10) можно зависать коордийатной U заданного значения, величина производной cf снижается, становясь меньше зоны нечувствительW j(p) -- в разомкнутой системе регулирования выходной сигнал U j описывается уравнением
Ui W,,(P)WO(P)U -t- W,(p)W(p)(H- +F(A)) Лг A .
лителя;
и о сигнал задания; U,(t)- входной сигнаш объекта регулирования с ограничением |U,(t)| 6В; U(t) - выходной сигнал объекта
регулирования; А - возмущение на выходе
объекта регулирования. Для простоты можно принять Wy(p) 1 и Up О, тогда
Ь г WO(P)(I + Р(Л))А -Л.
Для регулирования оптимального по быстродействию, управляющий сигнал и, на входе объекта должен иметь прямоугольную форму (фиг, 2), причем максимальная амплитуда управляю щего сигнала должна определяться и ограничиваться лишь насыщением элементов системы. Тогда
i.1 -f
Uj В(1-е )-(В-/1)(1-е е -.(0
Отсюда легко найти оптимальное время регулирования, приравняв нулю вы ражение (1) в момент :
-L о-1 Y
В(1-е )-(В- Л)(1-е )- А О Получим t. -ТДп(1 - -).
т В
т.е. при t tj сигнал /i(t) дол- з;ен быть максимальным, а при t t
большинства систем автоматического регулирования, обладающих значительным запасом управляющего сигнала по
t, -Т,1п(1 - I ) « Agi.(2)
,, /
(p) -- в разомкнутой системе регулирования выходной сигнал U j описывается уравнением
Ui W,,(P)WO(P)U -t- W,(p)W(p)(H- +F(A)) Лг A .
j
° должен быть равен нулю, В Д , что характерно для
лителя;
и о сигнал задания; U,(t)- входной сигнаш объекта регулирования с ограничением |U,(t)| 6В; U(t) - выходной сигнал объекта
регулирования; А - возмущение на выходе
объекта регулирования. Для простоты можно принять Wy(p) 1 и Up О, тогда
Ь г WO(P)(I + Р(Л))А -Л.
Для регулирования оптимального по быстродействию, управляющий сигнал и, на входе объекта должен иметь прямоугольную форму (фиг, 2), причем максимальная амплитуда управляю щего сигнала должна определяться и ограничиваться лишь насыщением элементов системы. Тогда
i.1 -f
Uj В(1-е )-(В-/1)(1-е е -.(0
Отсюда легко найти оптимальное время регулирования, приравняв нулю вражение (1) в момент :
-L о-1 Y
В(1-е )-(В- Л)(1-е )- А О Получим t. -ТДп(1 - -).
т В
т.е. при t tj сигнал /i(t) дол- з;ен быть максимальным, а при t t
° должен быть равен нулю, В Д , что характерно для
большинства систем автоматического регулирования, обладающих значительным запасом управляющего сигнала по
5-10) можно зависать
t, -Т,1п(1 - I ) « Agi.(2)
5149
Таким образом, для обеспечения
оптимального по быстродействию регулирования длительность сигнала /(t) при известных и заданных Т и В , должна быть пропорциональна амплитуде возмущення. А.
В данной системе при W(p) « WgCp) сигнал на выходе второго сумматора 5 будет равен возмущению / , действу- ющему на выходную координату Uj объекта регулирования, и система по своим свойствам становится эквивалентной разомкнутым системам. Для нелинейного звена 10 с характеристикой типа ан- тилогарифмической, реального дифференциатора 7 и релейного элемента 8 с зоной нечувствительности можно записать ,
.Г
of
Тогда при действии скачкообразного возмущения на выходе реального дифференциатора 7 будет сигнал
t
Т -f „ сл Т -
) Г|е
Ке
f е
КТ
е
слЛ
(3)
Время, в течение которого сигнал p(t) на выходе релейного элемента 8 с зоной нечувствительности будет равен В, определим из выражения (3), приравняв его величине зоны нечувствительности:
(t)
КТ Т
т
ГсЛ 1 ЬГ
кт
Выбирая параметры нелинейного звена 10 такими, что
кО
КТ, имеем сД .
(4)
Из выражения (4) видно, что длительность на выходе релейного элемента оказывается пропорциональной амплитуде возмущения,
Приравняв (2) и (4), найдем связь между параметрами системы стабилизации, при которых обеспечивается квазиоптимальное по быстродействию регулирование:
fc |.
Таким образом, использование данной системы стабилизации позволит сократить длительность протекания пере-. ходных процессов и повысить качество регулирования.
Формула изобретения
Система стабилизации по авт.св.
35 № 1272307, отличающаяся тем, что, с целью повьш1ения быстродействия и качества стабилизации объекта первого порядка при компенсации действия скачкообразных возмущений во
всем возможном диапазоне их изменения, выход второго сумматора соеди нен с входом дифференциатора через введенное в систему нелинейное звено с характеристикой антилогарифмичес 5 кого типа.
| Шило В.Л | |||
| Линейные интегральные схемы в радиоэлектронной аппаратуре, М.: Советское радио, 1979, с | |||
| Приспособление для воспроизведения изображения на светочувствительной фильме при посредстве промежуточного клише в способе фотоэлектрической передачи изображений на расстояние | 1920 |
|
SU172A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Система стабилизации | 1985 |
|
SU1272307A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
