3U93981
становленных отражающих поверхностей, которые служат системой отсчета.
Способ осуществляется следующим образом,
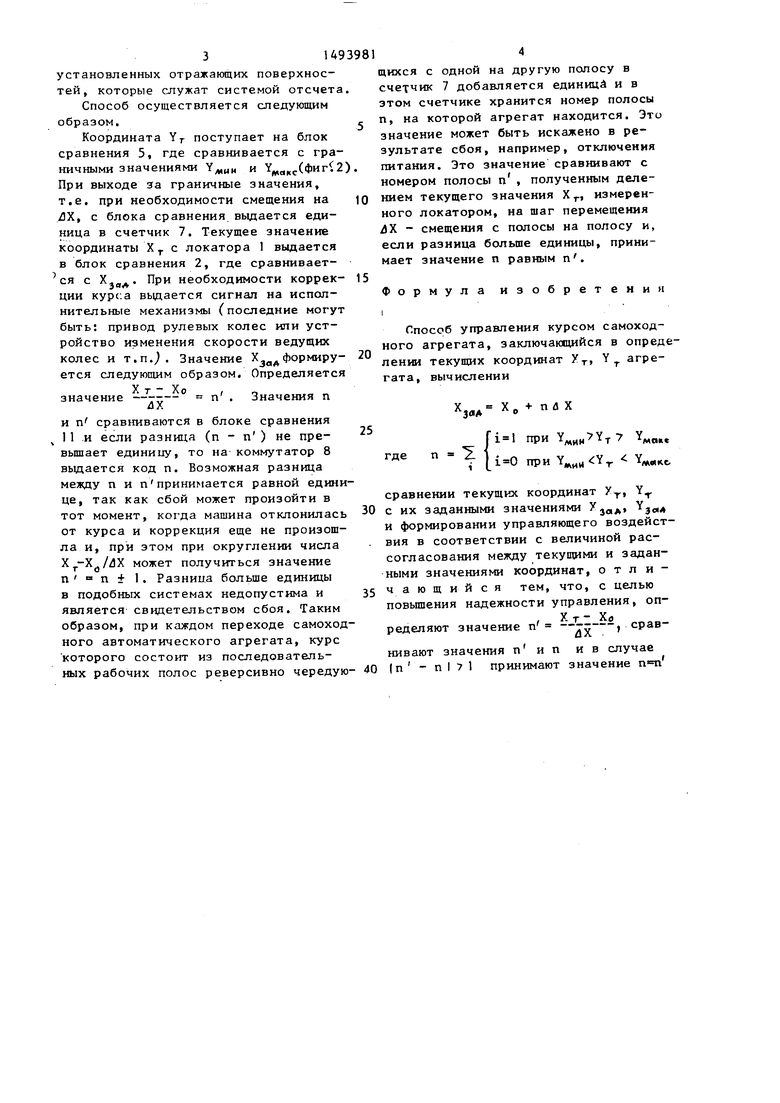
Координата YT поступает на блок сравнения 5, где сравнивается с граничными значениями и .(). При выходе за граничные значения, т.е. при необходимости смещения на ю )Х, с блока сравнения выдается единица в счетчик 7, Текущее значение координаты Х с локатора 1 выдается в блок сравнения 2, где сравнивает- ся с Xj. При необходимости коррек- 15 ции курса выдается сигнал на исполнительные механизмы (последние могут быть: привод рулевых колес или устройство изменения скорости ведущих колес и T.n.j . Значение фор миру- 20 ется следующим образом. Определяется
X т - Хо ,
7v- йУ.
и п сравниваются в блоке сравнения 11 и если разница (п - п ) не превышает единицу, то на-коммутатор 8 выдается код п. Возможная разница между п и п принимается равной единице, так как сбой может произойти в тот момент, когда машина отклонилась от курса и коррекция еще не произоша и, при этом при округлении числа может получиться значение п ± 1. Разница больше единицы подобных системах недопустима и35
является свидетельством сбоя. Таким образом, при каждом переходе самоходого автоматического агрегата, курс которого состоит из последовательных рабочих полос реверсивно чередую- 40
значение
Значения п
25
цихся с одной на другую полосу в счетчик 7 добавляется единиц и в этом счетчике хранится номер полосы п, на которой агрегат находится. Это значение может быть искажено в результате сбоя, например, отключения питания. Это значение сравнивают с номером полосы п , полученным делением текущего значения X , измеренного локатором, на шаг перемещения 4Х - смещения с полосы на полосу и, если разница больше единицы, принимает значение п равным п .
Формула изобретении I
Способ управления курсом самоходного агрегата, заключающийся в опредлении текущих координат Х, Y агрегата, вычислении
Ь«А Х,+ ndX
где
п
fi l
Mi-o
при Y,
при ,:YT. .
сравнении текущих координат Х, Y с их заданными значениями Xj, Yjo, и формировании управляющего воздействия в соответствии с величиной рассогласования между текущими и заданными значениями координат, отличающийся тем, что, с целью повьш1ения надежности управления, onY-т- Y
ределяют значение п Гу, сравнивают значения п и п ив случае |п - п I 7 1 принимают значение
фигЛ
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2001 |
|
RU2189625C1 |
| Устройство программного управления машиной для шлифования полов | 1985 |
|
SU1335931A1 |
| СПОСОБ ПУСКА РАКЕТ ДЛЯ ПОДВИЖНЫХ ПУСКОВЫХ УСТАНОВОК | 2012 |
|
RU2504725C2 |
| Машина для шлифования мозаичныхпОлОВ | 1979 |
|
SU841921A1 |
| СПОСОБ И СИСТЕМА ДЛЯ СНИЖЕНИЯ РАСХОДА КРАСКИ ПРИ ПЕЧАТИ | 2009 |
|
RU2405201C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2006794C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАЛЫХ ВЫСОТ И РЕНТГЕНОВСКИЙ ВЫСОТОМЕР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2236024C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО СИГНАЛАМ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2008 |
|
RU2379700C1 |
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2009 |
|
RU2406071C1 |
| Автопрокладчик пути судна на карте | 1989 |
|
SU1716554A1 |
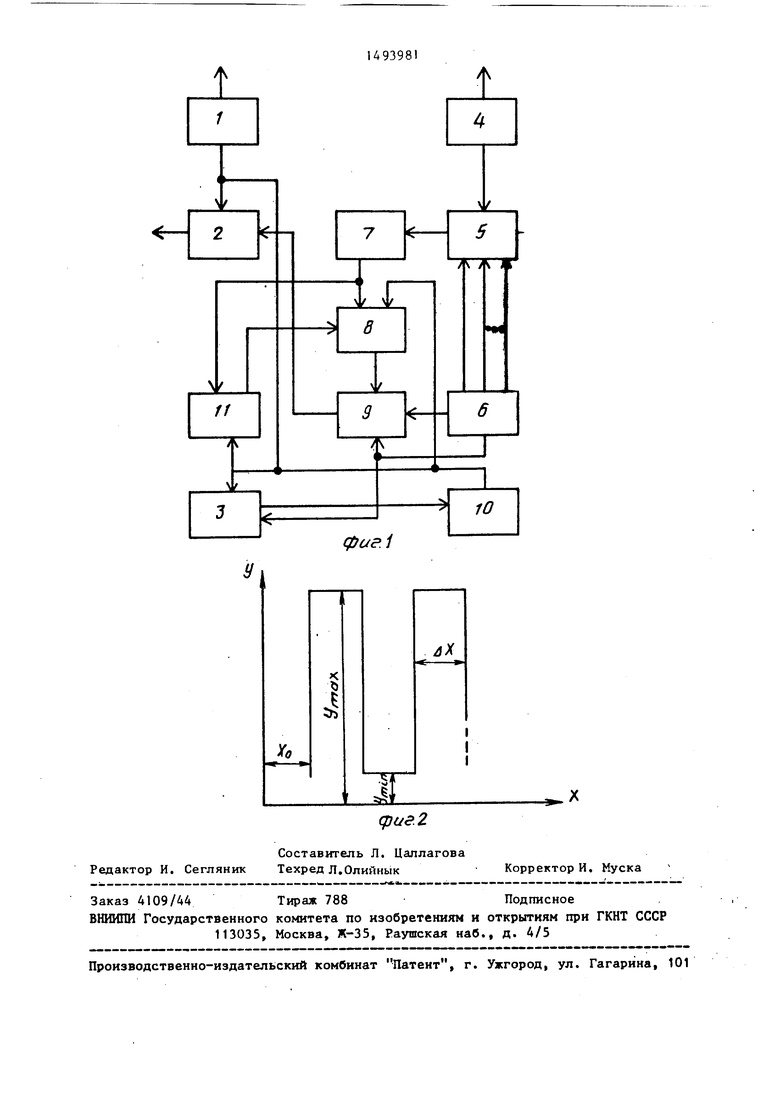
Изобретение относится к способам управления автоматическими самоходными агрегатами и может быть использовано в машиностроении, робототехнике. Цель изобретения - повышение надежности управления. При каждом переходе самоходного автоматического агрегата, курс которого состоит из последовательных реверсивно чередуемых рабочих полос, с одной на другую полосу в счетчик добавляется единица и в нем хранится номер полосы N , на которой агрегат находится. Это значение может быть искажено в результате сбоя, например отключения питания. Это значение сравнивают с номером полосы N1, полученным делением текущего значения XT, измеренного ультразвуковым локатором, на шаг перемещения δХ (смещение с полосы на полосу), и , если разница N1-N больше единицы, принимают значение N равное N1. Этим обеспечивается повышение надежности управления курсом автоматического самоходного агрегата вследствие того, что значение номера полосы в любом случае будет отличаться от действительного не более, чем на единицу, что приводит к сохранению курса самоходного агрегата в условиях воздействия неблагоприятных внешних факторов. 2 ил.
Редактор И. Сегляник
Составитель Л. Цаллагова Техред Л.Олийнык
qjae.Z
Корректор И. Муска
| Машина для шлифования мозаичныхпОлОВ | 1979 |
|
SU841921A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
