)YN,N, A/J:: :xX v Nr7 i,,..-,U
lOT J/ES } J J ;: : - -:: Т1Л Лfe7 S7afer7fer-feJJ 13
ГЛ /f
5 2
6 I
, A/J:: :xX v Nr7 i,,..-,U
4:: CO
СП
r-feJJ 13
ГЛ /f
от
;o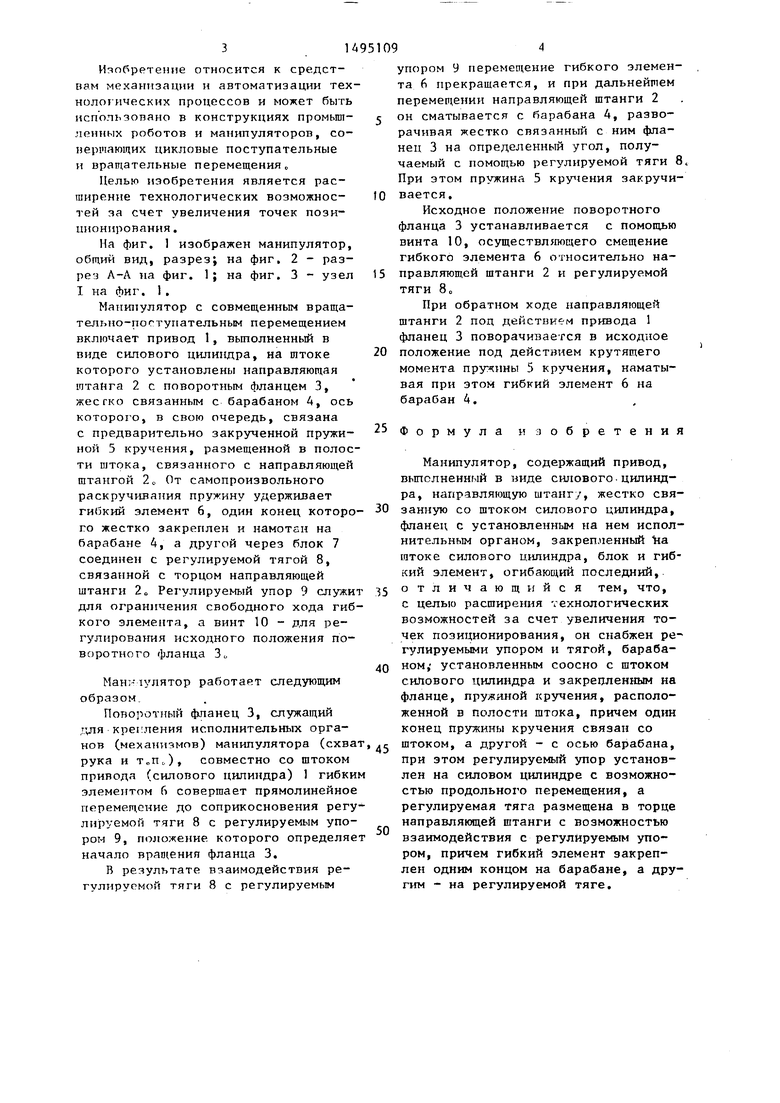
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия для изготовления деталей типа штанг | 1985 |
|
SU1287974A1 |
| Устройство крепления | 2016 |
|
RU2633229C1 |
| Манипулятор | 1979 |
|
SU770781A1 |
| Манипулятор разборки облицованных кокилей | 1981 |
|
SU996094A1 |
| Двухимпульсный регулятор угловой скорости | 1987 |
|
SU1451654A1 |
| Модуль промышленного робота | 1982 |
|
SU1021598A1 |
| Модуль промышленного робота | 1976 |
|
SU555006A1 |
| САМОХОДНАЯ УСТАНОВКА ДЛЯ ВОЗВЕДЕНИЯ АНКЕРНОЙ КРЕПИ | 2021 |
|
RU2765002C1 |
| Модуль промышленного робота | 1981 |
|
SU1016154A1 |
| СПАСАТЕЛЬНО-ТРАНСПОРТНЫЙ ПОДВОДНЫЙ АППАРАТ С УСТРОЙСТВАМИ КРЕПЛЕНИЯ К КОМИНГС-ПЛОЩАДКЕ ПОДВОДНОГО ОБЪЕКТА | 2012 |
|
RU2526365C2 |
Изобретение относится к средствам механизации и автоматизации технологических процессов и может быть использовано в конструкциях промышленных роботов и манипуляторов, совершающих цикловые поступательные и вращательные перемещения. Целью изобретения является расширение технологических возможностей за счет увеличения точек позиционирования. Для этого на штоке привода 1 установлены направляющая штанга 2, в которой выполнена полость, и поворотный фланец 3, жестко связанный с барабаном 4. Ось барабана связана с предварительно закрученной пружиной кручения 5, размещенной в полости направляющей штанги 2, от самопроизвольного раскручивания пружину удерживает гибкий элемент 6, один конец которого жестко закреплен и намотан на барабане 4, а другой через блок соединен с регулируемой тягой 8, связанной с торцом направляющей штанги 2. Регулируемый упор 9 служит для ограничения свободного хода гибкого элемента, а винт 10 - для регулировки исходного положения поворотного фланца 3. 3 ил.
..i. - /.- .- // / ////f f //1 /////f / /,..
. V ч ч 4 ч ч ч X УЧУ
Изобретение относится к средствам механизации и автоматизации технологических процессов и может быть использовано в конструкциях промьш - леиных роботов и манипуляторов, со- нершающих цикловые поступательные и вращательные перемещения
Целью изобретения является расширение технологических возможностей за счет увеличения точек позиционирования.
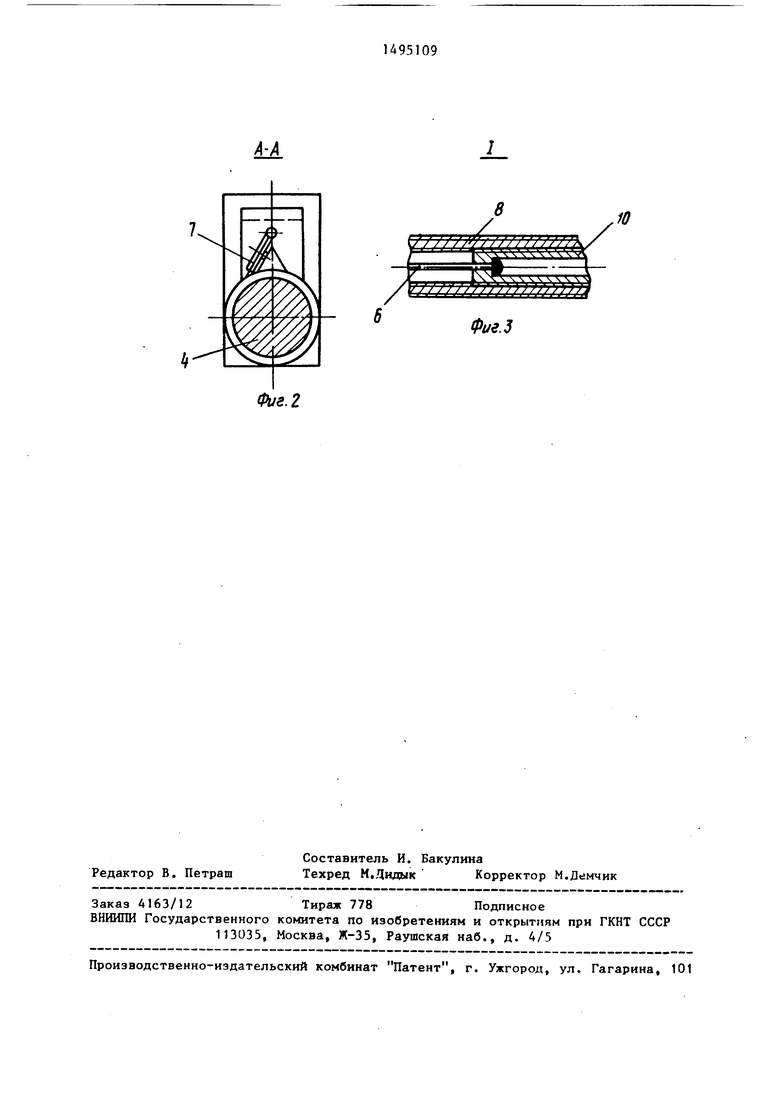
На фиг. 1 изображен манипулятор, вид, разрезj на фиг, 2 - разрез А-Л на фиг. 1; на фиг. 3 - узел I на фиг. 1.
Манипулятор с совмещенным враща- тельно-поступательным перемещением включает привод 1, вьтолненный в виде силового цилшщра, на штоке которого установлены направляющая штанга 2 с поворотным фланцем 3, жестко связанным с барабаном 4, ось которого, в свою очередь, связана с предварительно закрученной пружиной 5 кручения, размещенной в полости штока, связанного с направляющей штангой 2 о От самопроизвольного раскручивания пружину удерживает гибкий злемент 6, один конец которого жестко закреплен и намотан на барабане 4, а другой через блок 7 соединен с регулируемой тягой 8, связанной с торцом направляющей штанги 2о Регулируемый упор 9 служи для ограничения свободного хода гибкого элемента, а винт 10 - для регулирования исходного положения поворотного фланца 3„
Ман7 аулятор работает следующим образом.
Поворотный фланец 3, служащий ,1У1Я крепления исполнительных органов (механизмов) манипулятора (схват, .г штоком, а другой - с осью барабана.
рука и ТоП,) совместно со штоком привода (силового цилиндра) 1 гибким элементом 5 совершает прямолинейное перемегцение до соприкосновения регулируемой тяги 8 с регулируемым упором 9, положение которого определяет начало вращения фланца 3.
В результате взаимодействия регулируемой тяги 8 с регулируемым
50
при этом регулируемый упор установлен на силовом цилиндре с возможностью продольного перемещения, а регулируемая тяга размещена в торце направляющей штанги с возможностью взаимодействия с регулируемым упором, причем гибкий элемент закреплен одним концом на барабане, а другим - на регулируемой тяге.
упором 9 перемещение гибкого элемента 6 прекращается, и при дальнейшем перемещении направляющей штанги 2 он сматывается с барабана 4, разворачивая жестко связанный с ним фланец 3 на определенный угол, получаемый с помощью регулируемой тяги 8. При этом пружина 5 кручения закручивается.
Исходное положение поворотного фланца 3 устанавливается с помощью винта 10, осуществляющего смещение гибкого элемента 6 относительно на- правляющей штанги 2 и регулируемой тяги 8 о
При обратном ходе направляющей штанги 2 под действием привода 1 фланец 3 поворачивается в исходное положение под действием крутящего момента пругчины 5 кручения, наматывая при этом гибкий элемент 6 на барабан 4.
35
25
Формула
обретения
5
0
Манипулятор, содержащий привод, выполненный в ниде силового-цилиндра, направляющую штанг/, жестко связанную со штоком силового цилиндра, фланец с установленным на нем испол- нительньм органом, закрепленный на штоке силового цилиндра, блок и гибкий элемент, огибаюп4ий последний,- отличающийся тем, что, с целью расширения технологических возможностей за счет увеличения точек позиционирования, он снабжен регулируемыми упором и тягой, барабаном,- установленным соосно с штоком силового цилиндра и закрепленным на фланце, ПРУЖИ1ЮЙ кручения, расположенной в полости штока, причем одни конец пружины кручения связан со
0
при этом регулируемый упор установлен на силовом цилиндре с возможностью продольного перемещения, а регулируемая тяга размещена в торце направляющей штанги с возможностью взаимодействия с регулируемым упором, причем гибкий элемент закреплен одним концом на барабане, а другим - на регулируемой тяге.
Фиг. г
8
{.//// // /// / / / / ////f
T.VА
Ж
ю
Y////// / // // /
Фиг.
| СПОСОБ ИЗМЕРЕНИЯ ДЕЙСТВУЮЩЕГО ЗНАЧЕНИЯ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 0 |
|
SU218303A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| I | |||
