(54) МОДУЛЬ ПРОМЫШЛЕННОГО РОБОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Модуль промышленного робота | 1981 |
|
SU1016154A1 |
| Модуль промышленного робота | 1979 |
|
SU856786A1 |
| Устройство для загрузки плоских изделий, преимущественно выводных рамок интегральных схем | 1987 |
|
SU1499540A1 |
| Механическая рука | 1978 |
|
SU747605A1 |
| Промышленный робот | 1986 |
|
SU1313689A1 |
| Зубообрабатывающий модуль | 1986 |
|
SU1364442A1 |
| Промышленный робот | 1980 |
|
SU965761A1 |
| Автооператор | 1987 |
|
SU1465249A1 |
| Захватное устройство | 1989 |
|
SU1722812A1 |
I
Изобретение относится к машиностроению в частности к конструкциям промышленных роботов и может найти применение при создании роботов с поступательным перемещением элементов.
Известны роботы с приводом от электромотора через передачу типа шестерня-рейка 1.
Однако эти роботы имеют низкую скорость перемещения.
Известен промышленный робот ПРЦ-1, модуль которого содержит силовой цилиндр с установленными на его корпусе регулируемыми упорами, ограничивающими перемещение штока цилиндра, и взаимодействующий с этими упорами подвижной j .op, закрепленный на жестко связанной со штоком цилиндра штанге и снабженный механизмом его включениявыключения 2j.
У такого робота сложный и длительный процесс переналадки на разные величины ходов и отсутствуют промежуточные фиксированные попожения, что ограничивает технологические возможности робота.
Цель изобретения - расширение xextionoгических возможностей робота.
Достигается она тем, что в пред,т1агаемом роботе на корпусе силового цилиндра смонтированы приводы регулируемых упоров и направляющие, параллельные оси цилиндра, причем регулируемые упоры в направляющих.
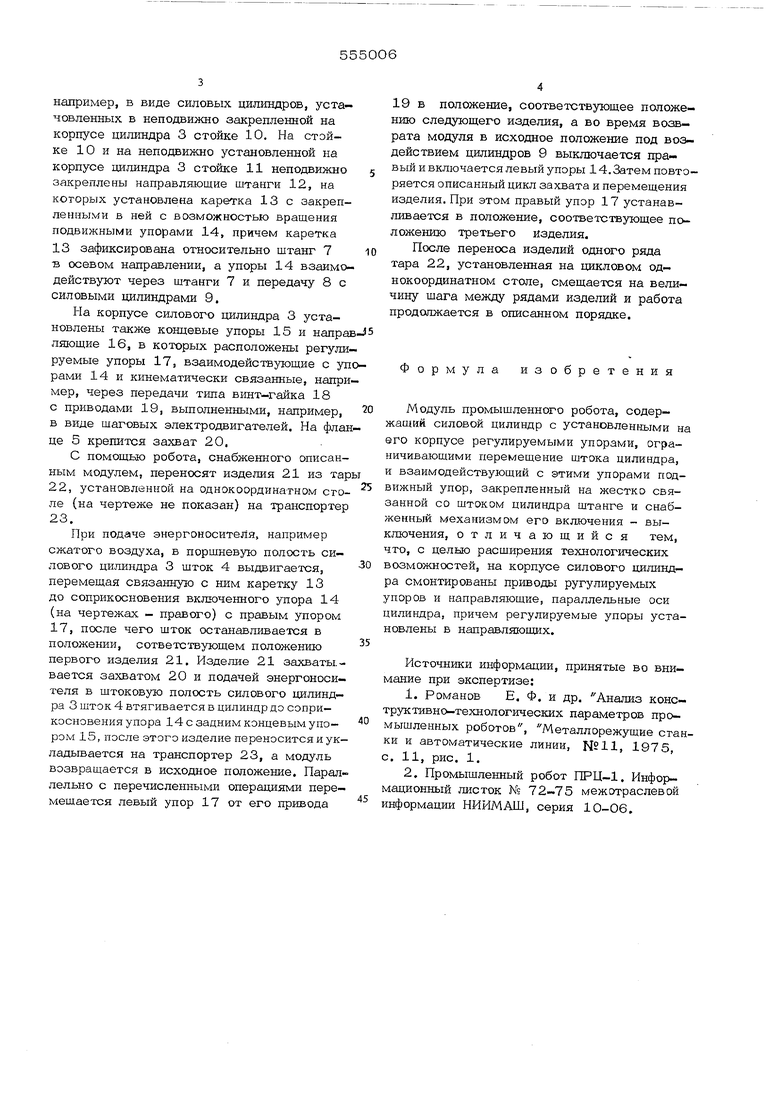
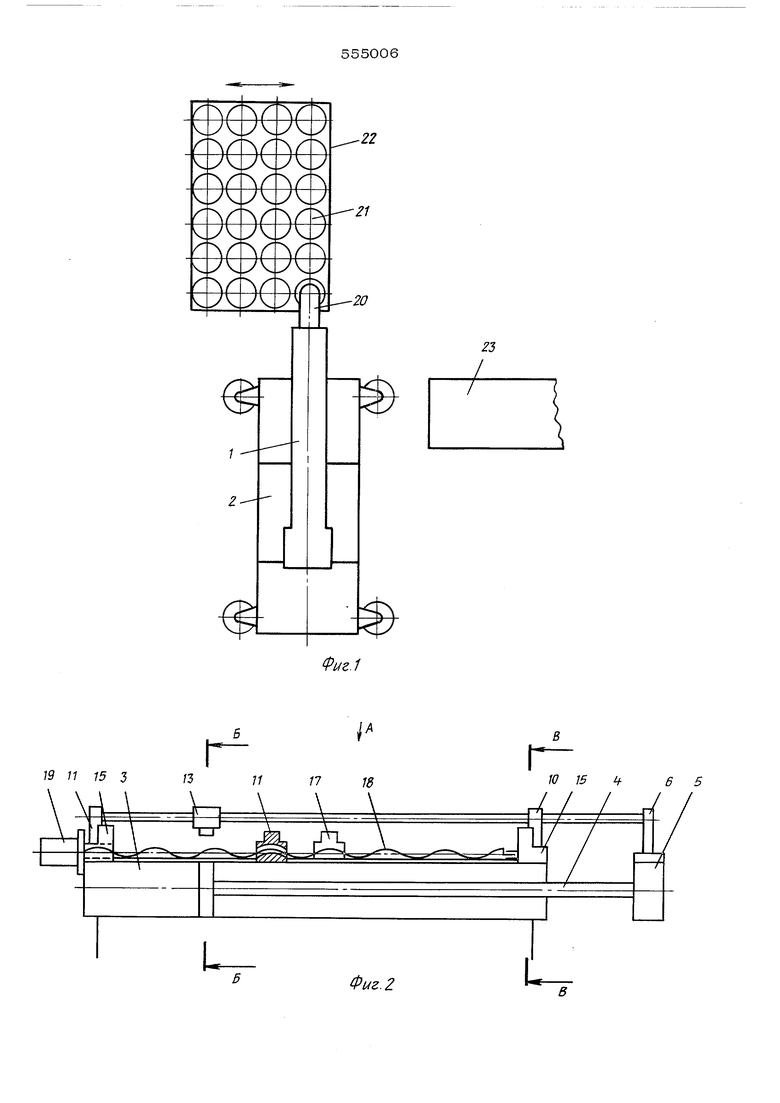
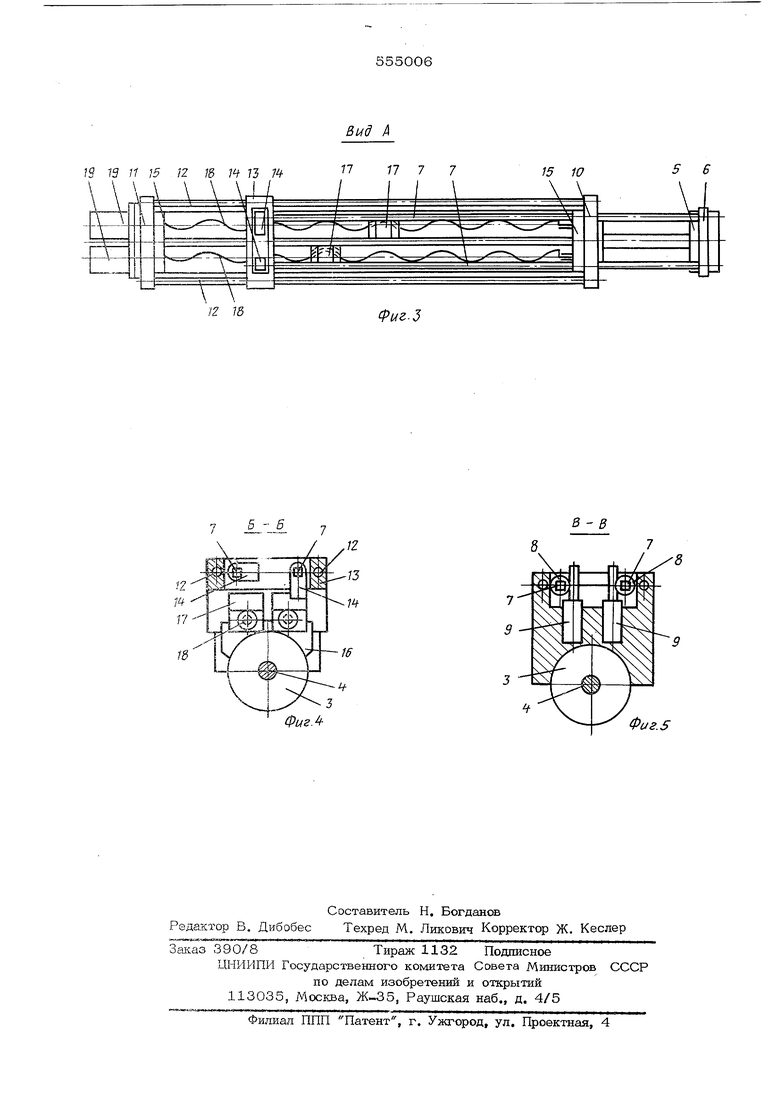
На фиг. 1 изображен рабочий участок и промышленный робот, с модулем, обеспечивающим горизонтальное возвратно-поступательное движение захвата, общий вид; на фиг. 2 дана кинематическая схема модуля промышленного робота; на фиг, 3 вид А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 2; на фиг. 5 - разрез В-В на фиг. 2.
Модуль 1 промышленного робота 2 содержит силовой цилиндр 3, со штоком 4 которого жестко связан фланец 5 с установленной на нем стойкой 6. В стойке 6 закреплены с возможностью вращения квадратные штанг-и 7, связанные через передачу 8 типа шестерня-рейка с механизмом включения-выключения упоров, выполненным
например, в виде силовых цилиндров, установленных Б неподвижно закрепленной на корпусе цилиндра 3 стойке 10, На стэйке 10 и на неподвижно установленной на корпусе цилиндра 3 стойке 11 неподвижно закреплены направляющие штанги 12, на которых установлена каретка 13 с закрепленными в ней с возможностью вращения подвижными упорами 14, причем каретка 13 зафиксирована относительно штанг 7 в осевом направлении, а упоры 14 взаимодействуют через штанги 7 и передачу 8 с силовыми цилиндрами 9.
На корпусе силового цилиндра 3 установлены также концевые упоры 15 и напра ляющие 16, в которых расположены регулируемые упоры 17, взаимодействующие с упрами 14 и кинематически связанные, например, через передачи типа винт-гайка 18 с приводами 19, выполненными, например, в виде шаговых электродвигателей. На фланце 5 крепится захват 20.
С помощью робота, снабженного описанным модулем, переносят изделия 21 из тар 22, установленной на однокоординатном еголе {на чертеже не показан) на транспортер 23.
При подаче энергоносителя, например
сжатого воздуха, в поршневую полость силового цилиндра 3 шток 4 выдвигается,перемещая связанную с ним каретку 13 до соприкосновения включенного упора 14 (на чертежах - правого) с правым упором 17, после чего шток останавливается в положении, сответствующем положению первого изделия 21. Изделие 21 захваты.вается захватом 20 и подачей энергоносителя в штоковую полость силового цилиндра 3 шток 4 втягивается в цилиндр до соприкосновения упора 14 с задним концевым упором 15, после этого изделие переносится и укладывается на транспортер 23, а модуль возвращается в исходное положение. Параллельно с перечисленными операциями перемещается левый упор 17 от его привода
4
19 в положение, соответствующ;ее положению следующего изделия, а во время возврата модуля в исходное положение под воздействием цилиндров 9 выключается правый и включается левый упоры 14. Затем повторяется описанный цикл захвата и перемещения изделия. При этом правый упор 17 устанавливается в положение, соответствующее положению третьего изделия.
После переноса изделий одного ряда тара 22, установленная на цикловом однокоординатном столе, смещается на величину шага между рядами изделий и работа продолжается в описанном порядке.
Формула изобретения
Модуль промышленного робота, содержащий силовой цилиндр с установленными н его корпусе регулируемыми упорами, ограничивающими перемещение штока цилиндра, и взаимодействующий с этими упорами подвижный упор, закрепленный на жестко связанной со щтоком цилиндра щтанге и снабженный механизмом его включения - выключения, отличающийся тем, что, с целью расщирения технологических возможностей, на корпусе силового цил1 ндра смонтированы приводы ругулируемых упоров и направляющие, параллельные оси цилиндра, причем регулируемые упоры установлены в направляющих.
Источники информации, принятые во внимание при экспертизе:
с. 11, рис. 1.
2,Промышленный робот ПРЦ-1. Информационный листок № 72-75 межотраслевой информации НИИМАШ, серия 10-06.
23
r
5 5/37//7/5
-
ялоет//т
W 15 Li-65
/ /
Л
.2
в
77
19 13 11 /5 12 18 14 73 т
12 18
5 - S
Фаг Л
Вид /
77 7
15 10
Фиг. 5
8- В
Фиг.5
