1, fff ff 9 Изобретение относится к машиностроению, а именно к промышленным роботам и манипуляторам для автоматйзации основны;: и вспомогательных операций. Известен модуль промышленного ро бота, содержащий силовой цилиндр со штоком, соединенный с фланцем, ограничительные и регулируемые упоры 13. Недостатком известного модуля является выполнение задающих упоров в виде гаек на ходовых ви нтах, что усложняет переналадку модуля и не позволяет осуществить свободный поиск приемного устройства. Цель изобретения - повышение про изводительности модуля.. Поставленная цель достигается . тем, что модуль промышленного робот содержащий силовой цилиндр со штоком, соединенным с флавцем, ограничительные и регулируемые упоры, сна жен упругими элементами, а фланец с единен со штоком силового цилиндра через эти элементы, причем регулиру емый упор установлен на штоке силового цилиндра, а ограничительные упоры - на фланце соосно с регулиру емым упором. На чертеже дана схема предлагаемого устройства. .Устройство состоит из силового цилиндра 1 со штоком 2. Внутри штока 2 расположены упругие элементы 3 и 4, между которыми установлен диск 5, жестко связанный со штангой 6, имеющей возможность осевого перемещения внутри штока 2. К штанге б жестко прикреплен фланец7, на гиль зе 8 которого установлены ограничительные упоры 9 и 10. Между упорами 9 и 10 установлен регулируемый упор 11, который проходит через продольный паз гильзы 8 и жестко связан со штоком 2 силового цилиндра 1. Корпу цилиндра 1 имеет фланец 12. Упругие элементы 3 и 4, например пружины, подбираются и.з такого усло вия, чтобы соблюдалось следующее неравенство ., где ггт - сумма сил трения покоя от подвижных масс, еремещаемых модулем}, pj- рабочее усилие сжатия ynpylгого элемента; Q- требуемое усилие отключения перемещения модуля. Модуль промышленного робота работает следующим образом. При движении штока 2 силового цилиндра 1 вправо под действием упругих элементов 3 и 4 фланец 7 сохраняет постоянным свое положение относительно штока 2. При встречу с препятствием присоединительный фланец 7 останавливают, при этом шток 2, продолжая двигаться дальше, деформирует упругий элемент 3 и регулируемый упор 11, переместившись вправо относительно неподвижной гильзы 8 фланца 7, воздействует на упор 9. Упор 9 дает команду на отключение силового цилиндра 1. При движении штока 2 влево и при встрече присоединительного фланца с препятствием ijtttприемным устройство деформируется упругий элемент 4 и регулируекшй упор 11, перемещаясь влево, воздей-, ствует на упор 10, который дает ко- манду на отключение силового цилиндра 1. Таким образом, предлагаемое устройство одновременно с упрощением его конструкции позволяет осуществлять свободный поиск приемного устройства и при его нахождении производить позиционирование с высокой точностью без предварительной переналадки. Повышается производительность модуля за счет исключения вспс 1огательного времени переналадки (перестановки; ограничительных упоров. Bee это дает возможность использовать модуль промышленного робота при обслуживании нескольких приемных устройств.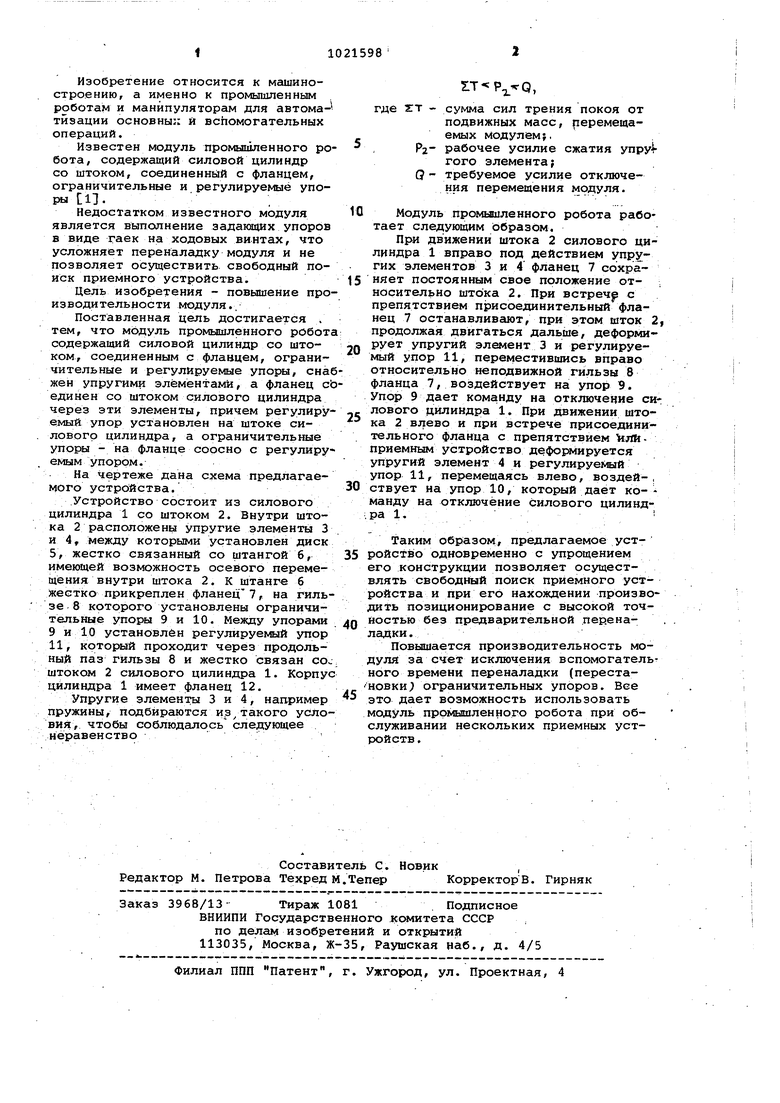
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формования фланца на конце трубы из термопластов | 1989 |
|
SU1729778A1 |
| Модуль промышленного робота | 1978 |
|
SU722757A1 |
| Модуль промышленного робота | 1976 |
|
SU555006A1 |
| Модуль промышленного робота | 1986 |
|
SU1341016A1 |
| ПОЛУАВТОМАТ ДЛЯ ОШИПОВКИ ШИН, УСТРОЙСТВО ДЛЯ УСТАНОВКИ ШИПОВ, ГОЛОВКА ДЛЯ ЭТОГО УСТРОЙСТВА И СПОСОБ ОШИПОВКИ ШИН | 1998 |
|
RU2138403C1 |
| Устройство для нанесения смазки на внутреннюю поверхность покрышек | 1974 |
|
SU517508A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Устройство для снижения остаточных напряжений в деталях | 1986 |
|
SU1799918A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Манипулятор | 1987 |
|
SU1495109A1 |
МОДУЛЬ ПРОМЫИЛЕННОГО РОБОТА содержащ-ий силовой цилиндр со штоком соединенным с фланцем, ограничительные и регулируеьие , о тли чающийся тем, что, с целью повмпения производительности, он снабжен упругими элементами, а фла- нец соединен со штоком силового цилиндра через эти элементы, npif4pM регулируемый упор установлен на штоке силового цилиндра, а ограничительные уп0ра на фланце соосно с регулируемым упором.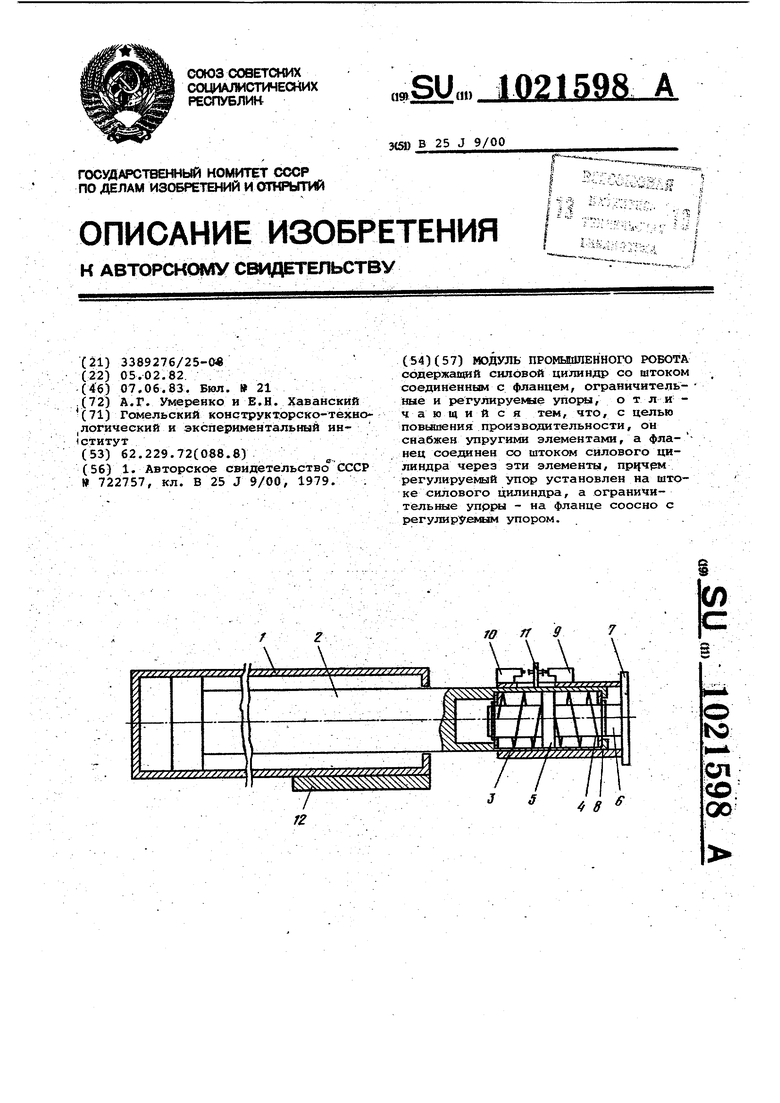
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Модуль промышленного робота | 1978 |
|
SU722757A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| . | |||
