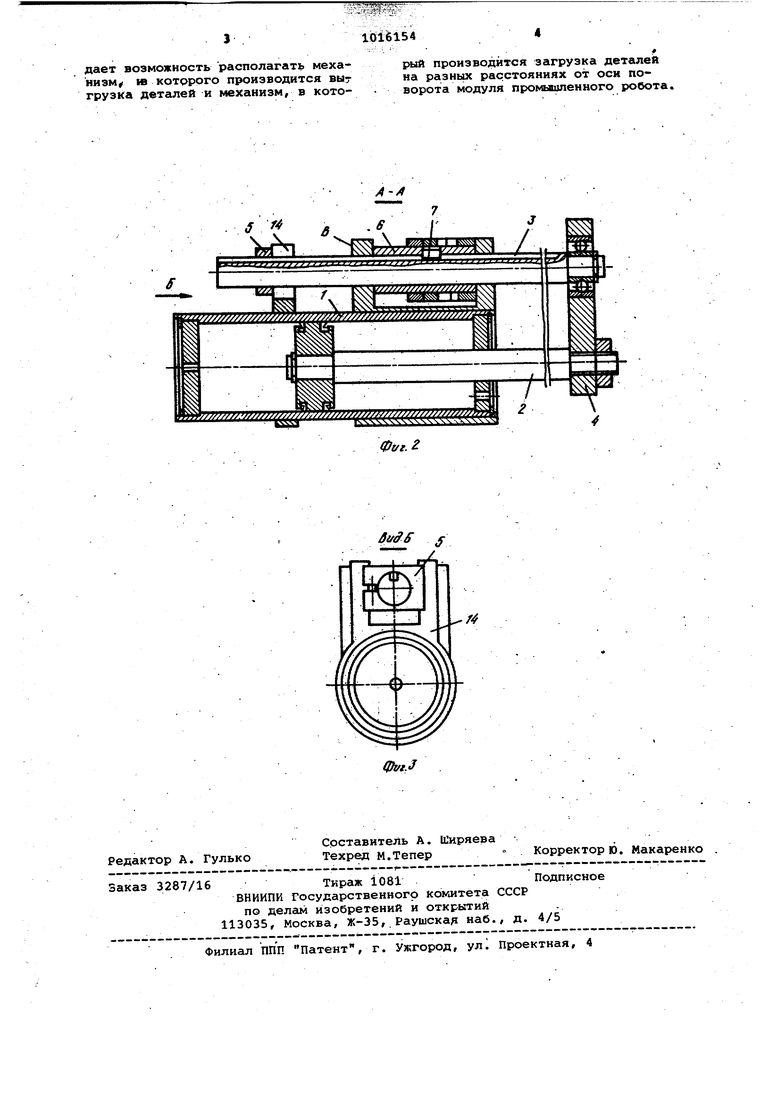
Изобретение относится к машиност ению, в частности к конструкциям пр мышленных роботов и манипуляторов. -Известен промышленный робот, содержащий модуль механической руки с силовым цилиндром осевого перемещения, в корпусе которого жестко закреплена втулка с продольными пазами, шток этого цилиндра выполнен полым и снабжен со стороны поршня, по меньшей мере, двумя диаметрально расположенными зубцами, входящими в пазы втулки, внутри которой установ лен шарнирно связанный с корпусом цилиндра ходовой винт, несущий раздвижные упоры, взаимодействующие с указа.нными зубцами tH. Однако этот модуль имеет очень сложную конструкцию, обладающую множеством кинематических связей и подвижных элементов, вследствие чег надежность работы промышленного ро. бота в автоматическом режиме весьма низкая. Наиболее близким по технической сущности к предложенному является модуль промышленного робота, содержащий силовой цилиндр с установленными на его корпусе регулируемыми упорами, ограничивающими перемещения штока цилиндра, и взаимодейству ющий с этими упорами подвижный упор закрепленный на жестко связанной со штоком цилиндра штанге и снабженный механизмом включения-выключения, пр чем на корпусе силового цилиндра смонтированы приводы регулируемых упоров и направляющие, параллельно оси цилиндра этом модуле предусмотрена возможность регулирования величины ход цилиндра при каждом его срабатывани что определяет сложность конструкции модуля. в большинстве случаев при автома тизации процессов с помощью промышленных роботов не возникает необходимости изменения величины выдвиже нии руки при выполнении конкретной операции, поэтому необходимы три раз личные точки позицирования: рука втя нута для выгрузки детали, причем выдвижение в позицию захвата детали и в позицию выгрузки должно осуществляться попеременно. Целью изобретения является увеличение числа точек позицирования руки робота при обеспечении циклограммы его работы. Указанная цель достигается тем, что модуль промышленного робота, содержгиций корпус с установленным на нем регулируемым упором, штангу, жестко связанную через стойку со штоком силового цилиндра, и жесткий упор, смонтированный на штанге, снабжен зубчатой муфтой,одна полумуфта которой установлена на штанге, а другая кинематически со стойкой, а также пальцами, установленными на фланцах полумуфт зубчатой муфты и подпружиненными относительно них, причем в регулируемом упоре выполнен паз, с которым взаимодействует жесткий упор. На фиг. 1-изображен предлагаемый модуль, общий вид; на фиг. 2 - разрез А-А на фиг. 1J на фиг. 3 - вид Б на фиг. 2. Модуль состоит, из корпуса 1, который одновременно является корпусом силового цилиндра штока 2 с поршнем птангиЗ - стойки 4, соединяющей, свободный конец штока 2 со штангой 3, жесткого упора 5 j, закрепленного на другом конце штанги 3, втулки б, которая связана с помощью шпонки 7 со штангой 3, муфты 8, напрессованной на втулку б и взаимодействующей с двумя полу(Муфтами 9 и 10, на фланцах которых закреплены пальцы 11 и 12., перемещающиеся вместе с полумуфтами 9 и 10 в корпусе 1. На пальцах 11 установлены пружины 13. Для остановки штока 2 в среднем положении служит регулируемый упор 14 с пазом, закреп- ленный на корпусе 1. Модуль действует следующим обра,зом. При подаче воздуха в бесштоковую полость цилиндра шток 2 вместе со штангой 3 выдвигается в свое -крайнее положение до взаимодействия жесткого упора 5 и торца В корпуса 1. Позиция штока 2 определяется поло- жением жесткого упора 5 на штанге 3.При подаче воздуха в штоковую полость цилиндра шток 2 втягивается. В конце хода втягивания стойка 4,взаимодействуя с пальцами 12 перемещает полумуфту 10 в осевом направлении, при этом муфта 8, втулка б и штанга 3 поворачиваются, а полумуфта 9 перемещается влево, сжимая пружины 13-. В начале выдвижения штока 2 пружины13 через полумуфту 9 поворачивают штангу 3, при этом жесткий упор 5 поворачивается относительно в регулируемом .упоре 14, и, взаимодействуя с последним, останавливает шток 2 в позиции, определяемой положением регулируемого упора 14 на корпусе 1. При очередно втягивании штока 2 штанга 3 поворачивается таким же образом как было описано, и при выдвижении штока 2 жесткий упор 5 проходит через паз в регулируемом упоре 14 до взаимодействия с торцем в корпусе 1. Таким образом, при работе предлагаемого модуля происходит поочередное выдвижение штока 2 в крайнее и среднее регулируемые положения, что
дает возможность располагать механизм IB которого производится выт грузка деталей и механизм, в который производится загрузка деталей на разньис расстояниях от оси поворота модуля промышленного робота.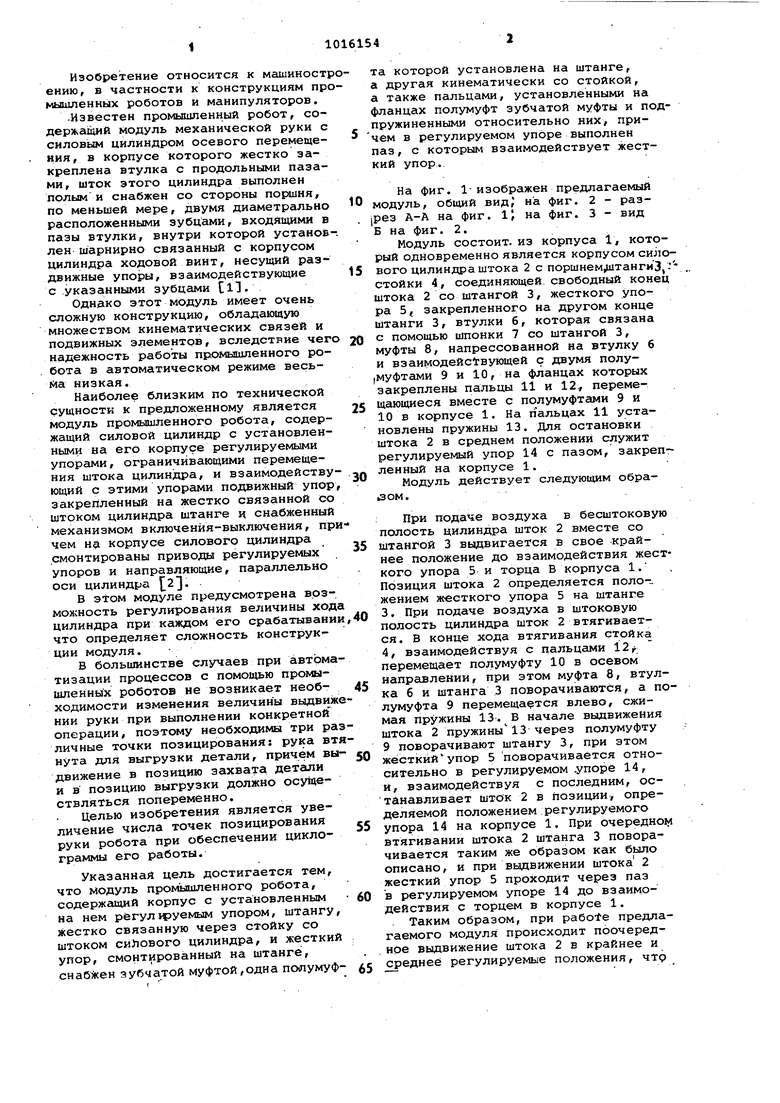
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1978 |
|
SU874328A1 |
| Схват манипулятора | 1982 |
|
SU1076278A1 |
| Промышленный робот | 1974 |
|
SU503711A1 |
| Зубообрабатывающий модуль | 1986 |
|
SU1364442A1 |
| Модуль промышленного робота | 1980 |
|
SU876419A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Промышленный робот | 1986 |
|
SU1313689A1 |
| Промышленный робот | 1978 |
|
SU776912A1 |
| Устройство для подачи заготовок | 1985 |
|
SU1296368A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
модуль ПPO 5ЬaIlЛEHHOГO РОБОТА, содёржав1Ий корпус с .установленным на нем рдагулируеьвлм упором, штангу, жестко связанную через стойку со штоком силового цилиндра, и жесткий упор, смонтированный на штанге, о тличающийся тем, что, с целью увеличения числа точек позиционирования,, он снабжен зубчатой муфтой , одна полумуфта которой установлена на штанге, а другая кинематически связана со стойкой, а также пальцами, установленньми на фланцах полумуфт зубчатой муфты и подпружиненными относительно них, причем а регулируемом упоре выполнен паз, а жесткий упор расположен с возмож.ностью взаимодействия с пазом регулируемого упора. СП С /J // S ff
5 f4
f yfM/f/f/Mf///ff/:f//fff/ f/f//f/////// f//ffMffff/f/f// /Jif ffr,
2
Фиг. г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Промышленный робот | 1974 |
|
SU503711A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Модуль промышленного робота | 1976 |
|
SU555006A1 |
| Способ модулирования для радиотелефона | 1921 |
|
SU251A1 |
