31495744
Изобретение относится к дискретным адаптивным системам управления и может быть использовано для управления, например, летательными аппаратами с неопределенной внутренней структурой. Цель изобретения - расширение области применения системы за счет управления аппаратами неопределенной структуры.
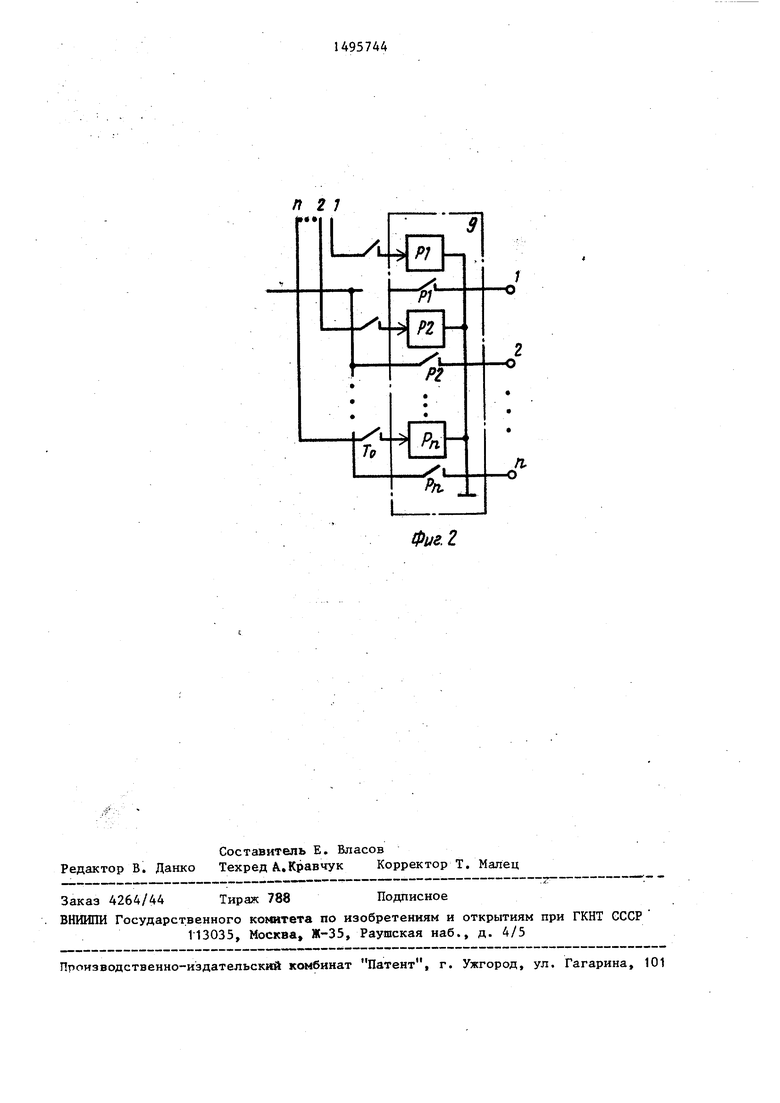
На фиг. 1 приведена блок-схема адаптиёной системы; на фиг, 2 - - структура коммутатора.
10
Система содержит датчик 1, элемент 2 сравнения, квантователь 3 сигнала ошибки (Е -. Xfl с периодом Т), репе 4, блок из п ключей 5, делитель 6 частоты, генератор 7 тактовых импульсов , блок 8 определения формы сигнала (на периоде дискретности Т 4 Тс) коммутатор 9, п корректирующих блоков 10, сумматор 11, формирователь 12 управляющего вия, исполнительное устройство 13 и объект .14 управления, на который действует возмущение F.
Блок определения формы сигнала реализует последовательно соотношения
(КТ) Е (КТ) - Е С(К-1) TJ; (КТ) /ЗЕ (КТ)
(КТ)
/ЗЕ
г
4Е
(КТ)
-ЛЕ (К-О.ТЗ;
-Л (К-1)
П-1
П-1
.(КТ) Л (КТ) -ZJ EC(K-1)TJ,
О)
де Е (КТ) Х„р(КТ) - X(KT) - зна- 45
чение сигнала ошибки; Т TO/п - период квантования сигнала;
TO пТ - период поступления управляющей информации на вход коммутатора 9 и вьдачи управления на оОъект 14;
п -- порядок аппроксимации процесса на интерва- ле Т, проверяет условия
50
55
|ДЕККТ)| Е, , то п О;
4
то п
1;
то п 2;
(2)
10 .(KT)| -i Е„, то п
п 5
0
5
0
0
5
о
. Е , Е
где U Г J « IL , д оп
На одном из выходов блока.8 через каждые TO появляется сигнал, которьш однозначно свидетельствует о характере изменения сигнала ошибки на интервале времени Т,.
Если сигнал появится на первом выходе, то ошибка Е (t) постоянная, на втором - Е (t) изменяется по линейному закону, на третьем - Е (t) изменяется по параболе, на четвертом - Е (t) изменяется на кубической параболе, на i-M виходе - Е (t) изменяется по параболе i - 1-го порядка и т.д. При небольших периодах Т„ значение п 2 - 4.
В рассмотренных случаях объект управления локально описьшается звеньями, для каждого из которых используются известные корректирующие: блоки 10. ,
Коммутатор 9 обеспечивает прохождение сигнала Е (КТ) в одном из п определенных- корректирзтощих блоков .при наличии сигнала на одном из п выходов блока 8.
Корректирующие блоки 10 выбирают- ся так, чтобы обеспечить требуемое качество управления пэстоянным, линейным и параболически изменяющимся сигналом Е (t) на интервале Т. Например, если на интервале TO сигнал . Е (t) постоянньй, линейный, квадра- тичньй или кубический, то логично, соответственно, применять алгоритмы вида
и (KTJ и (КТо)
а
1
аТ
Е (КТ),
Е (КТ),
п О;
(КТ„) - , Е (КТ) О
3
2 аТ
К (КТр),
п 2;
n 3,
где а - статический коэффициент передачи объекта управления.
Для повьлиения точности путем введения астатизма можно ввести интегральную составляю1цук1.
Суммитор 11 объединяет выходы с корректирующих блоков.
Формирователь 12 формирует кусочно-постоянное или другое управление на периоде Т , воздействз ощее на исполнительное устройство 13, сигнал с которого действует на обьект 14. так, чтобы ошибка Е (t) уменьшилась.
Адаптивная система управления работает следующим образом.
Под воздействием возмущения F и других факторов появляется сигнал ощибки Е (t), который через квантователь 3 поступает в блок 8, в котором по значениям Е (КТ), Е (K-l)Tj, Е (К-2)Т,... вычисляются разности (1), реализуются условия (2) и получается информация о характере изменения Е (t) на интервале Т о пТ в виде одиночных сигналов n О, n 1, n 2,..., которые поступают на соответствующий вход коммутатора через каждые Т. При наличии сигнала управ- ленш на одном из выходов блока 8 блок 5 пропускает Е (КТ) на соответствующий корректирующий блок, кото- рый формирует управление U (КТ), пр- ступающее на формирователь 12 с пере-
даточной функцией, например ) -с соединены соответственно через п кор1 - SP«4J
ректируюищх блоков с п входами сумматора, выход которого соединен с входом формирователя управляющего воздействия, тактовый выход квантователя сигнала ошибки подключен через делитель частоты к управляющему входу блока из п .
-р , и далее на исполнительное
устройство 13.
Анализ характера изменения сигнала Е (t) и формирование управления происходит на каждом интервале времени TO пТ.
10
15
20
25
п
30
35
Применение адаптивной систем позволяет существенно сократить априорную информацию об объекте управлеш я, обеспечить управление объектами неопределенной структуры с одним входом по управлению и одним выходом по регулируемой величине, расширить функциональные возможности регулятора пу- тем унификации, существенно сократить трудозатраты и стоимость проектируемых систем управления.
Формула изобретения
Адаптивная система управления, со- держахцая формирователь управляющего воздействия, выход которого через исполнительное устройство соединен с входом объекта управления, подключен- HQro выходом к входу датчика, выход которого соединен с первым входом элемента сравнения, второй вход которого подключен к входу системы, а выход - к информационному входу квантователя сигнала ошибки, а также сумматор и корректирующий блок, о т - л. и ч а ю щ а я с я тем, что, с целью расширения области применения системы за счет управления объектом неопределенной структуры, в нее введены делитель частоты, блок определения формы сигнала, коммутатор, блок из n ключей и п-1 корректирующих блоков, причем информационный выход квантователя сигнала ошибки соединен с входом блока определения формы сигнала и с информационными входами коммутатора, п заправляющих входов которого соединены соответственно с выходам блока из п ключей, п информационных входов которого соединены соответственно с выходами блока определения формы сигнала, п выходов кoм fyтaтopa
ректируюищх блоков с п входами сумматора, выход которого соединен с входом формирователя управляющего воздействия, тактовый выход квантователя сигнала ошибки подключен через делитель частоты к управляющему входу блока из п .
п 2 ;
Lij;ruj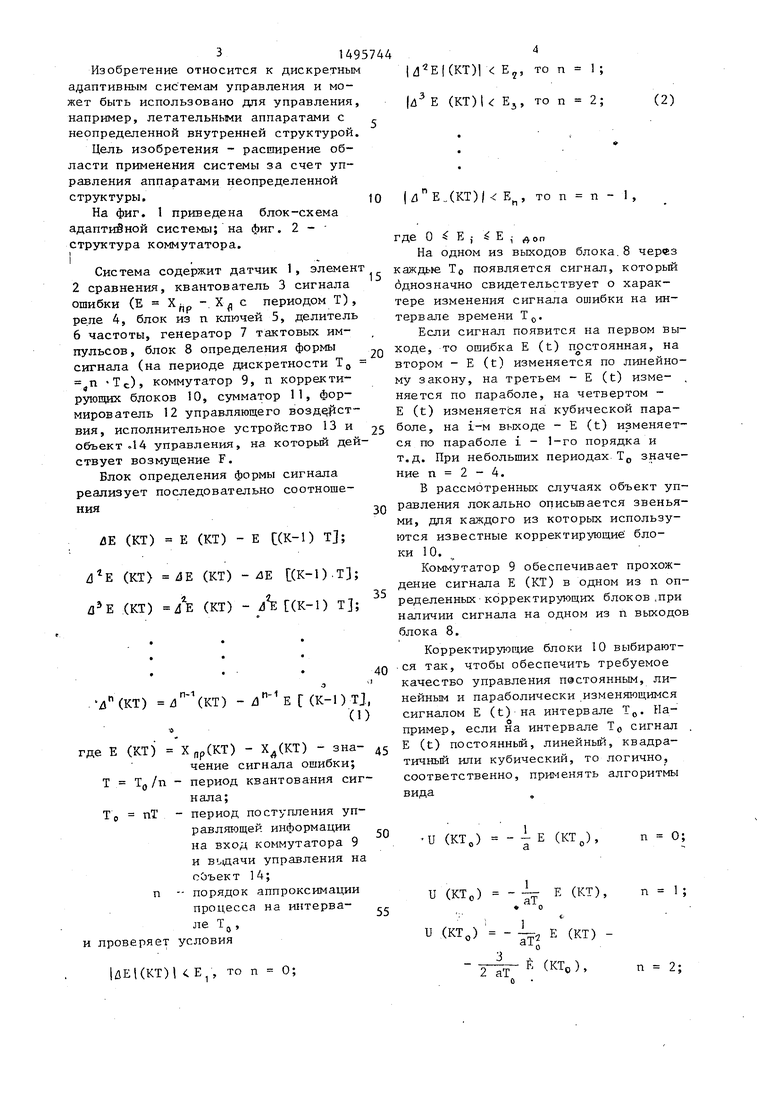

| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2066874C1 |
| Устройство передачи приема телевизионного сигнала с помощью дифференциальной импульсно-кодовой модуляции | 1988 |
|
SU1633521A1 |
| Адаптивный приемник сигналов данных | 1989 |
|
SU1672580A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОИЗВОДНЫХ ОТ КУСОЧНО-ПОЛИНОМИАЛЬНЫХ ФУНКЦИЙ | 1991 |
|
RU2047903C1 |
| Адаптивный измеритель параметров сигнала | 1981 |
|
SU970251A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ГИРОСТАБИЛИЗАТОРОМ | 2008 |
|
RU2381451C1 |
| Адаптивный дискретный согласован-Ный фильТР | 1979 |
|
SU813699A1 |
| Устройство для магнитно-импульсной обработки деталей | 1973 |
|
SU470251A1 |
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2001 |
|
RU2205417C2 |
| Адаптивная система управления | 1980 |
|
SU980070A1 |
Изобретение относится к дискретным адаптивным системам управления и может быть использовано для управления, например, летательными аппаратами с неопределенной внутренней структурой. Целью изобретения является расширение области применения системы за счет управления объектом неопределенной структуры. Система содержит датчик 1, элемент сравнивания 2, квантователь 3 сигнала ошибки, блок из N ключей 5, делитель частоты 6, блок 8 определения формы сигнала 8, коммутатор 9, N корректирующих блоков 10, сумматор 11, формирователь 12 управляющего воздействия, исполнительное устройство 13 и объект управления 13. Адаптивная система построена на основе анализа формы выходного параметра объекта управления на дискретных интервалах времени и выборе на основе этой информации корректирующего блока. 2 ил.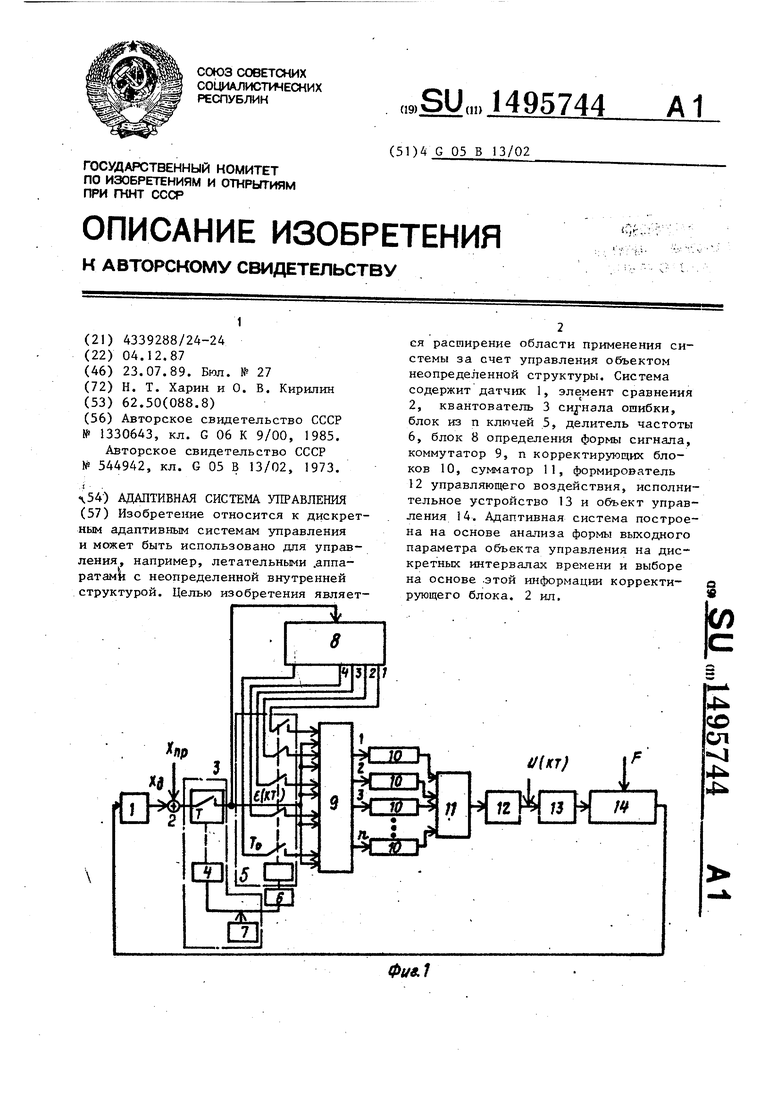
To
n
n
Фиг. 2
| Устройство для распознавания формы сигнала | 1985 |
|
SU1330643A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Дискретный самонастраивающийся регулятор | 1973 |
|
SU544942A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
