I Изобретение относится к швейному машиностроению, точнее к швейным полуавтоматам для смачивания заготов- I ки верха обуви.
Целью изобретения является повышение качества обработки изделий, что достигается введением подсистемы коррекции положения края детали.
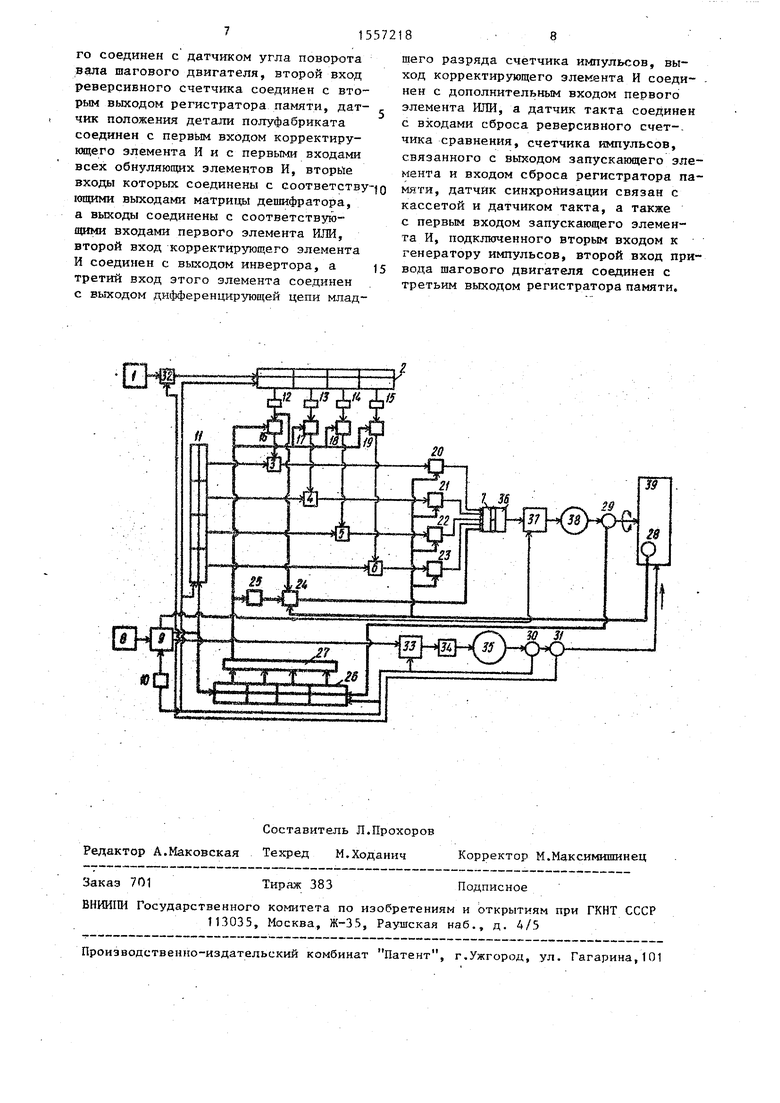
На чертеже представлена структурная схема системы.
Схема управления содержит генератор 1 импульсов, счетчик 2 счета импульсов последовательного принципа действия, матрицу дешифратора на элементах И 3-6, суммирующий элемент ИЛИ 7, регистратор памяти и подсистему коррекции положения края детали, регистратор памяти состоит из считывающего устройства 8, оперативного
запоминающего устройства (ОЗУ) 9, первый вход которого связан с выходом считывающего устройства 8 элемент 10 задержки, выход которого соединен с вторым входом ОЗУ 9, параллельный счетчик 11, параллельные выходы которого являются первыми разрядными выходами регистратора памяти; вход сброса счетчика 11 является входом сброса регистратора памяти, ; вход записи счетчика 11 связан с первым выходом ОЗУ.
В подсистему коррекции положения края детали входят дифференцирующие цепи 12-15, контрольные элементы И 16-19, обнуляющие элементы И 20-23, корректирующий элемент И 24, инвертор 25, реверсивный счетчик 26, элемент совпадений ИЛИ 27, датчик 28 коррексл ел
IsD
foe
ции, датчик 29 угла поворота вала шагового двигателя, датчик 30 такта, вырабатывающий импульсы сброса показаний счетчиков, датчик 31 синхронизации, обеспечивающий прекращение отрабатывания поворота при вхождении иглы в материал, запускающий элемент И 32.
К элементам швейного полуавтомата представленным на чертеже, относятся привод главного вала швейной машины, состоящий из цифроаналогового преобразователя (ЦАП) 33, усилителя 34, двигателя 35 главного вала, привод кассеты, состоящий из усилителя 36, распределителя 37 импульсов и шагового двигателя 38, и кассета 39,
Система управления работает следующим образом.
Программа поворота считывается в полном объеме с программоносителя с помощью считывающего устройства 8 и записывается в ОЗУ 9, откуда по сигналу датчика 30 такта очередной кадр программы записывается в счетчики 26 и 11, а также в ЦАП 33. Датчик 30 вырабатывает тактирующий импульс в момент, когда игла начинает выходить из материала, причем, поскольку в линии, связывающей датчик 30 с ОЗУ 9, находится элемент 10 задержки, а все счетчики связаны с датчиком 30 непосредственно, вначале происходит сброс показаний всех счетчиков и ЦАП, а после этого в счетчики 11, 26 и в ЦАП 33 проходит с ОЗУ 9 новый кадр программы.
Программа имеет две подпрограммы, одна из которых предназначена для управления двигателем привода главного вала швейной машины, а вторая - шаговым двигателем привода.
Подпрограмма управления двигателем привода главного вала швейной машины осуществляет управление частотой вращения вала этого двигателя. Каждый ее кадр остается записанным в ЦАП 33 на протяжении практически всего такта обработки (кадр программы сбрасывается после окончания такта и сразу же вслед за этим записывается кадр на новый такт).
Отработка кадра подпрограммы управления шаговым двигателем осуществляется следующим образом.
После выхода иглы из материала и записи кадра программы (как было показано выше) в счетчики 11 и 26
5
0
5
0
5
0
5
0
5
синхронизирующий датчик 31 открывает запускающий элемент И 32, через который импульсы генератора 1 начинают поступать в счетчик 2. При этом элементы И (3-6) матрицы дешифратора, которые связаны с разрядами счетчика 1i имеющими единицы, оказываются отпертыми. Датчик 28 коррекции в это время вырабатывает сигнал рассогласования. Поскольку детали не занимают нужного положения (это положение они должны занять после отработки кадра программы шаговым двигателем), следовательно, на обнуляющих элементах И 20-23 также имеется отпирающий сигнал. На выходе элемента совпадений ИЛИ 27 имеется в это время еди- ница, поскольку в счетчике 26 записано число, соответствующее данному кадру программы. Эта единица подается на входы контрольных элементов И 16- 19, которые в результате оказываются
отпертыми, а поскольку связь суммирующего элемента И 24 с элеметом совпадений ИЛИ 27 осуществляется через инвертор 25, то суммирующий элемент И 24 в это время оказывается запертым.
Таким образом, по мере поступления импульсов генератора 1 в счетчик 2 и появления в его соответствующих разрядах единиц соответствующие дифференцирующие цепи 12-15 формируют импульсы, которые проходят через контрольные элементы И 16-19 и поступают на входы элементов И 3-6 матрицы дешифратора. Если какой-либо иэ элементов И 3-6 матрицы дешифратора связан с разрядом счетчика 11, имеющим единицу, то импульс проходит через один из обнуляющих элементов И 20-23 и суммирующий элемент ИЛИ 7 на усилитель 36, распределитель 37 импульсов и на шаговый двигатель 38. По мере получения шаговым двигателем 38 импульсов он отрабатывает поворот, который фиксируется датчиком 29, и информация о величине поворота передается в счетчик 26. По достижении заданного данным кадром программы угла поворота в разрядах счетчика 26 оказываются нули, следовательно, нуль окажется и на выходе элемента совпадений ИЛИ 27, в результате чего контрольные элементы И 16-19 закро- ются и поступление импульсов на шаговый двигатель прекратится. Одновременно появится один из отпирающих
сигналов на корректирующем элементе И 24.
Знак импульсов, поступающих на шаговый двигатель 38, а следовательно, и направление вращения его вала определяется непосредственной связью ОЗУ 9 и распределителя 37 импульсов.
Количество импульсов, прошедших на шаговый двигатель 38, равно числу, записанному на счетчике 11, но это количество может быть недостаточным или избыточным по указанным выше причинам.
Рассмотрим коррекцию программы в случае,когда заданное программой количество импульсов является избыточным. При этом по мере поступления импульсов на шаговый двигатель 38 и поворота- его вала сигнал рассог- ласования датчика 28 коррекции будет уменьшаться и, когда деталь займет нужное положение, станет равным нулю. При этом обнуляющие И 20-23 и корректирующий И 24 элементы закроются и подача импульсов на шаговый двигатель 38 прекратится.
Рассмотрим коррекцию программы в случае, когда заданное программой количество импульсов является недостаточным. При этом сигнал рассогласования датчика 28 коррекции останется и после отработки заданного программой Количества импульсов, но при этом во всех разрядах реверсивного счетчика 26 будут нули, следовательно, нуль будет и на выходе элемента совпадений ИЛИ 27. Поэтому контрольные элементы И 16-19 будут перекрыты. Однако наличие инвертора 25 обеспечит наличие отпирающего сигнала на входе корректирующего элемента И 24, а второй отпирающий сигнал на этом элемен- те обеспечит датчик 28 коррекции, следовательно, через этот элемент с младшего разряда счетчика 2 будет обеспечено прохождение импульсов на шаговый двигатель 38.
При повороте главного вала шагового двигателя 35 по сигналу корректирующей системы, т.е. дополнительно к программе, в разрядах счетчика 26 остаются нули, поскольку после вычета из этого-счетчика числа импульсов, равного числу, записанному в счетчик, дальнейшие вычитающие импульсы счетчиком не считываются и не фиксируются.
Как только детаиь по Лаориката займет нужное положение, сигнал рассогласования датчика 28 коррекции исчезнет, следовательно, корректирующий элемент И 24 закроется и подача импульсов на шаговый двигатель прекратится. Дополнительно перекроются и обнуляющие элементы И 20-23, но это не окажет дополнительного воздействия на схему, поскольку контрольные элементы И 16-19 к этому времени уже перекрыты.
Таким образом, данная система управления позволяет корректировать программу в случаях, когда программа не полностью соответствует размерам деталей либо их положению в кассете.
Формула изобретения
Система управления однопрограмм- ным швейным полуавтоматом, содержащая генератор импульсов, счетчик импульсов, регистратор памяти, матрицу дешифратора на элементах И, первые входы которых соединены с первыми соответствующими разрядными выходами регистратора памяти, первый элемент ИЛИ, привод шагового двигателя кассеты, первый вход которого соединен с выходом первого элемента ИЛИ, причем выходы элементов И являются соответствующими выходами матрицы дешифратора, отличающаяся тем, что, с целью повышения качества обработки изделий, она дополнительно содержит датчик положения детали полуфабриката, датчик угла поворота вала шагового двигателя, дифференцирующие цепи по числу выходов счетчика импульсов, контрольные элементы И по числу дифференцирующих цепей, реверсивный счетчик, второй элемент ИЛИ, инвертор,
корректирующий элемент И, обнуляющие элементы И по числу выходов матрицы дешифратора, а также датчики синхронизации и такта и запускающий элемент И, причем входы дифференцирующих цепей соединены с соответствующими выходами счетчика импульсов, а выходы этих цепей соединены с соответствующими первыми входами контрольных элементов И, все вторые выходы которых
объединены и соединены с выходом второго элемента ИЛИ и входом инвертора, входы второго элемента ИЛИ соединены с соответствующими выходами реверсивного счетчика, первый вход которого соединен с датчиком угла поворота вала шагового двигателя, второй вход реверсивного счетчика соединен с вторым выходом регистратора памяти, датчик положения детали полуфабриката соединен с первым входом корректирующего элемента И и с первыми входами всех обнуляющих элементов И, вторые входы которых соединены с соответству гощими выходами матрицы дешифратора, а выходы соединены с соответствующими входами первого элемента ИЛИ, второй вход корректирующего элемента И соединен с выходом инвертора, а третий вход этого элемента соединен с выходом дифференцирующей цепи младшего разряда счетчика импульсов, выход корректирующего элемента И соединен с дополнительным входом первого элемента ИЛИ, а датчик такта соединен с входами сброса реверсивного счет-. чика сравнения, счетчика импульсов, связанного с выходом запускающего элемента и входом сброса регистратора памяти, датчик синхронизации связан с кассетой и датчиком такта, а также с первым входом запускающего элемента И, подключенного вторым входом к генератору импульсов, второй вход привода шагового двигателя соединен с третьим выходом регистратора памяти.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления швейной машиной | 1987 |
|
SU1527343A1 |
| Устройство управления многокоординатным механизмом | 1981 |
|
SU1001011A1 |
| Велотренажер | 1990 |
|
SU1811891A1 |
| Устройство стабилизации скорости резания для токарных станков с ЧПУ | 1983 |
|
SU1136112A1 |
| аСЕС©Юч1НАЯ | 1973 |
|
SU367198A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365965C2 |
| СИСТЕМА УПРАВЛЕНИЯ ШВЕЙНОЙ МАШИНОЙ | 1993 |
|
RU2106443C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ТЕЛЕВИЗИОННЫХ ОПТИЧЕСКИХ СИСТЕМ | 1991 |
|
RU2010448C1 |
| Устройство для измерения угла закручивания вращающегося вала | 1991 |
|
SU1795312A1 |
| Устройство для вычисления массы нефти и нефтепродуктов в резервуарах | 1983 |
|
SU1117653A1 |
Изобретение относится к швейному машиностроению и предназначено для использования в швейных полуавтоматах для смачивания заготовок верха обуви. Целью изобретения является повышение качества обработки изделий, что достигается за счет введения подсистемы коррекции положения края детали, это обеспечивает получение строчки на заданном удалении от фактического положения края детали. Система содержит реверсивный счетчик сравнения заданного регистратором памяти угла поворота кассеты и фактически отработанного, ряд контрольных и обнуляющих элементов И, совместно с датчиком обеспечивающих задание необходимых корректирующих импульсов, и корректирующий элемент И, обеспечивающий введение этих импульсов в блок управления приводом кассеты. 1 ил.
Составитель Л.Прохоров Редактор А.Маковская Техред М.ХоданичКорректор М.Максимишинец
Заказ 701
Тираж 383
ВНИИ1ТИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Подписное
| Рабинович А.Н | |||
| Системы управления автоматических машин | |||
| Киев: Техника, 1973, с.325. |
