Изобретение относится к средствам управления и может быть использовано на швейных машинах.
Цепь изобретения - повышение точности управления.
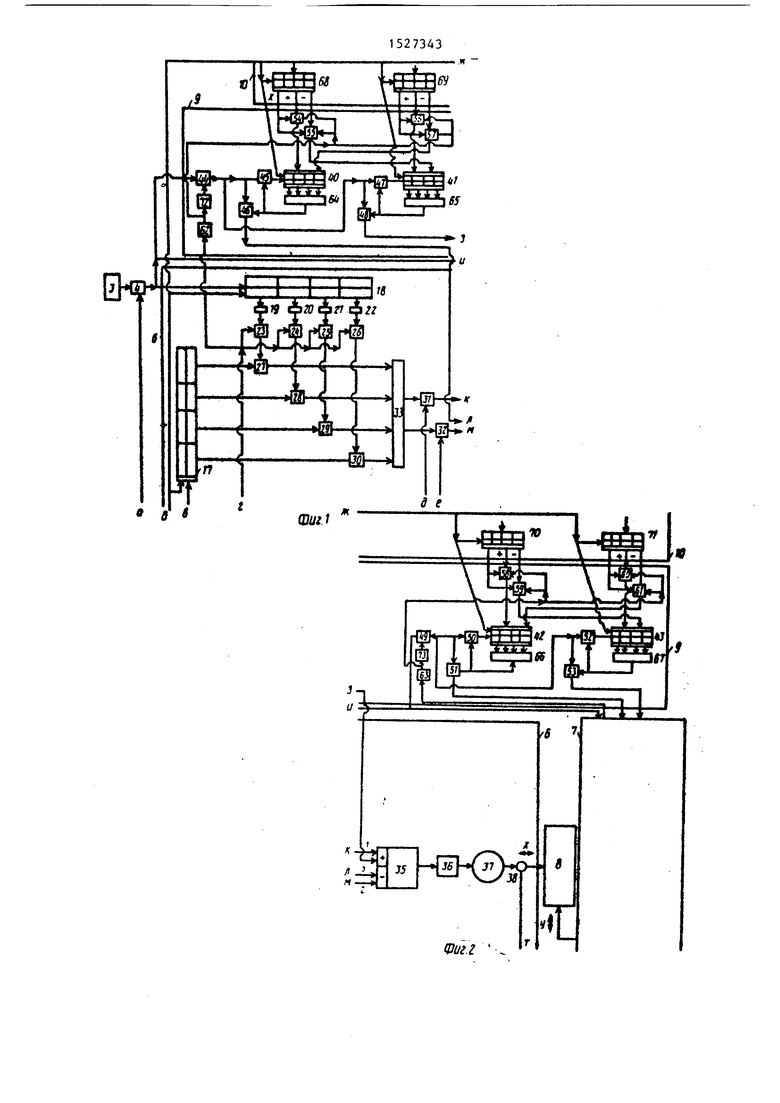
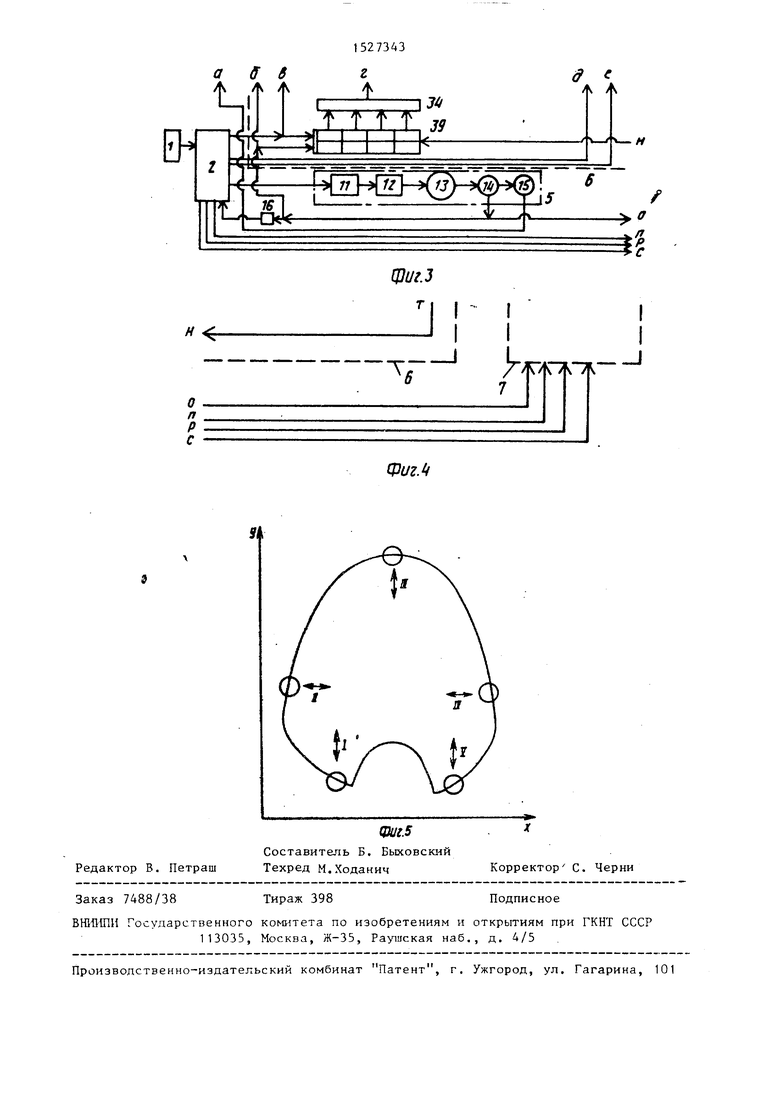
На фиг. 1-4 изображена структурная схема устройства} на фиг. 5 - варианты расположения обрабатываемой детали.
Устройство содержит блок задания программы, в который входят считыва- узел 1, оперативное запоминающее устройство 2, задающий генератор 3, элемент И 4, блок 5 управления приводом главного вала, блок 6 управления перемещением кассеты с деталью по оси X, блок 7 управления перемещением кассеты с деталью по оси У, кассета 8 с деталью (не показана), блок 9 коррекции, блок 10 контроля положения детали (показаны только выходные регистры) .
Блок 5 управления приводом главного вала содержит цифроаналоговьй преобразователь 11, усилитель 12, двигатель 13 привода, тактирующий датчик 14 и синхронизирующий датчик 15,
Блок 6 управления привода перемещением кассеты по оси X содержит счетчик
17параллельного действия, счетчик
18последовательного действия, дифференцирующие элементы 19-22, элементы И 23-32, элементы ИЛИ 33 и 34, двух- канальный усилитель 35, распредели- ггель 36 импульсов, шаговый двигатель р7, датчик 38 обратной связи по положению кассеты 8 (фиксирукший степень отработки программы) и реверсивный счетчик 39 параллельно-последовательного действия.
Блок 7 управления перемещением . кассеты по оси У содержит те же элементы, что и блок 6, и работает аналогичным образом.
Блок 9 коррекции содержит реверсивные счетчики 40-43, элементы И 44- 61, инверторы 62 и 63 и элементы ИЛИ 64-67.
На фиг. 2 показаны варианты расположения детали, откуда видно, что при расположении края детали в позициях I, III и V целесообразна коррекция по оси У, а в позициях II и IV - по оси X. В позициях II и IV один и тот же знак рассогласования требует различного направления коррекции (то же можно сказать о позициях III и I-IV), поэтому блок 10 контроля положения детали вьщает информацию о величине и знаке рассогласования в каждой из этих позиций. Даиный блок может быть выполнен, например пневматическим, струйным, фо- тоэлектрическим и содержит выходные регистры 68-71.
Кроме того, блок 9 коррекции содержит элементы 72 и 73 задержки.
Устройство работает следующим об- разомо
По сигналу тактирующего датчика 14 (который связан с главным валом швейной машины и вырабатывает сигнал управления после окончания выполнения цикла очередного стежка) происходит сброс предьдущего кадра прог-- раммы с цифрового регистра цифро- аналогового преобразователя 11, и спустя некоторое время (за сует элемента 16 задержки) этот сигнал поступает в оперативное запоминающее устройство 2, откуда очередной кадр программы передается в цифро- аналоговый преобразователь 11, преобразуется в аналогввьй сигнал, усиливается усилителем 12 и поступает на двигатель 13, что позволяет управ .jftTb частотой вращения вала двигателя привода главного вала швейной машины по заданной программе.
По сигналу тактирующего датчика 1 происходит сброс показаний счетчиков 17, 18 и 39, а затем этот сигнал проходит в оперативное запоминающее устройство 2, откуда число, соответ
5
0
5
0
5
0
5
0
5
ствующее очередному кадру программы, в параллельном коде записывается в счетчике 17 и 39 (таким образом, разряды счетчика 17, на которые записаны единицы, открывают соответствующие элементы И 27-30). Поскольку на выходе элемента ИЛИ 34, соединенного со всеми разрядами счетчика 39, в этот момент также единица, то будут открыты и элементы И 23-26. Так- тирунздий датчик 14 вырабатьшает тактирующий сигнал в момент, когда игла начинает выходить из материала заготовки и, вслед за этим вьфабатывает сигнал управления синхронизирующий датчик 15 (он вьфабатьшает сигнал в течение всего времени, пока игла находится вне материала заготовки, т.е. в течение того периода, когда можно осуществлят-ь программное и корректирующее перемещение кассеты с деталью). Зинхронизирующий датчик 15 открывает элемент И 4, через который импульсы задающего генератора 3 начинают поступать в счетчик 18. Единицы, появляющиеся в разрядах счетчика 18, преобразуются в импульсы дифференцирующими элементами 19-22, и, поскольку элементы И 23-26 открыты, эти импульсы проходят через те из элементов И 27-30, которые открыты единицами счетчика 17. Далее импульсы проходят через элементы ИЛИ 33 на элементы И 31 и 32. Один из этих элементов открыт по сигналу оперативного запоминающего устройства 2 (в зависимости от знака перемещения кассеты по координате X, соответствующего данному кадру программы), вследствие чего импульсы проходят на один из зходом усилителя 35, который усили- зает положительные или отрицательные импульсы. Усиленные импульсы поступают на распределитель 36 импульсов шагового -двигателя 37 и далее на соответствующие обмотки шагового двигателя 37, который осуществляет программное перемещение кассеты 8 по координате X в ту или иную сторону.
Число импульсов, прошедших на шаговый двигатель, таким образом, равно числу, записанному в счетЧик 17, т.е. соответствует данному кадру программы. По мере выполнения программы, датчик 38 обратной связи фиксирует величину перемещения кассеты 8 и передает информацию об этом
перемещет1и в цифровом виде на вход реверсивного счетчика 39 (импульсы при этом вычитаются из числа, записанного в счетчике 39). После того, как программное перемещение кас- сеты 8 достигает заданной данным кадром программы величины, во всех разрядах счетчика 39 оказываются нули, следовательно, ноль будет и на выходе элемента ИЛИ 34 (в дальнейшем импульсы счетчиком 39 не воспринимаются) . Появление нуля на выходе элемента ИЛИ 34 закрывает элементы И 23- 26, и программная подача импульсов на шаговый двигатель 37 прекращается.
Информация о позиции, величине и знаке рассогласования с одного из выходных регистров 68-71 датчика 10 по- 2о ложения детали поступает на соответствующие элементы И 54-61. Если деталь находится в позиции II, информация оказывается записанной в регистре 68, если деталь оказывается в позиции IV -75 (или 41) в регистре 69, если деталь находится в Аналогично работает блок 9 кор- в позиции III - в регистре 70, если
15 рез элемент И 46 (или 48) на соотве ствующий вход усилителя 35 и далее шаговый двигатель 37, вследствие чего происходит корректирующее перемещение кассеты 8. Это перемещен заканчивается тогда, кргда количес импульсов, прошедшее на вход счетчи ка 40 (или 41), а следовательно, и на шаговый двигатель, сравняется с числом, записанным в счетчике 40
рекции при необходимости коррекции по оси У.
деталь находится в позиции I (или V) - в регистре 71.
В противоположных позициях один и тот же знак рассогласования требует различного направления коррекции, поэтому элементы И 54-61 обеспечивают перераспределение информации между счетчиками 40-43. Например, при положительном рассогласовании на регистре 68 и отрицательном рассогласовании на регистре 69 информация поступает на счетчик 40, а при отрицательном рассогласовании на регистре 68 и положительном рассогласовании на регистре 69 информации поступает на счетчик 41.
Рассмотрим работу блока 9 коррекции в том случае, когда требуется коррекция по оси X. По окончании программного перемещения кассеты с деталью на выходе элемента ИЛИ 34 оказьшается ноль, следовательно на выходе инвертора 62 - единица. Эта единица поступает на входы элементов И 55-57, благодаря чему информация, хранящаяся в одном из регистров 68 или 69 передается на входы одного из счетчиков 40 или 41. Наличие в одном из счетчиков информации в виде числа обеспечивает появление единицы на выходе соответствующего элемента ИЛИ (64 или 65), что, в свою очередь, ото5 (или 41) Аналогично работает блок 9 кор-
крывает пару элементов И (45 и 46 или 47 и 48).
Спустя некоторое время (за счет - элемента 72 задержки) единица, появившаяся на выходе инвертора 62, открывает элемент И 44. Таким образом, импульсы задающего генератора 3 получают возможность проходить через
0 элемент И 44 и затем через элемент И 45 (или 47) в реверсивный счетчик j40 (или 41), производя уменьшение находящегося там числа. Те же импульсы имеют возможность пройти че-
5 рез элемент И 46 (или 48) на соответствующий вход усилителя 35 и далее на шаговый двигатель 37, вследствие чего происходит корректирующее перемещение кассеты 8. Это перемещение заканчивается тогда, кргда количество импульсов, прошедшее на вход счетчика 40 (или 41), а следовательно, и на шаговый двигатель, сравняется с числом, записанным в счетчике 40
(или 41) Аналогично работает блок 9 кор-
рекции при необходимости коррекции по оси У.
Если за время, отведенное на прог- раммное и корректирующее перемещения кассеты, коррекция полностью отрабо- - тана быть не может, она прекращается по сигналу синхронизирующего датчика 15, который перекрывает элемент И 4 на вь.коде задающего генератора 3. Сброс с регистров 68-71 и счетчиков - 0-43 осуществляется по сигналу тактирующего датчика 14.
40
Формула изобретения
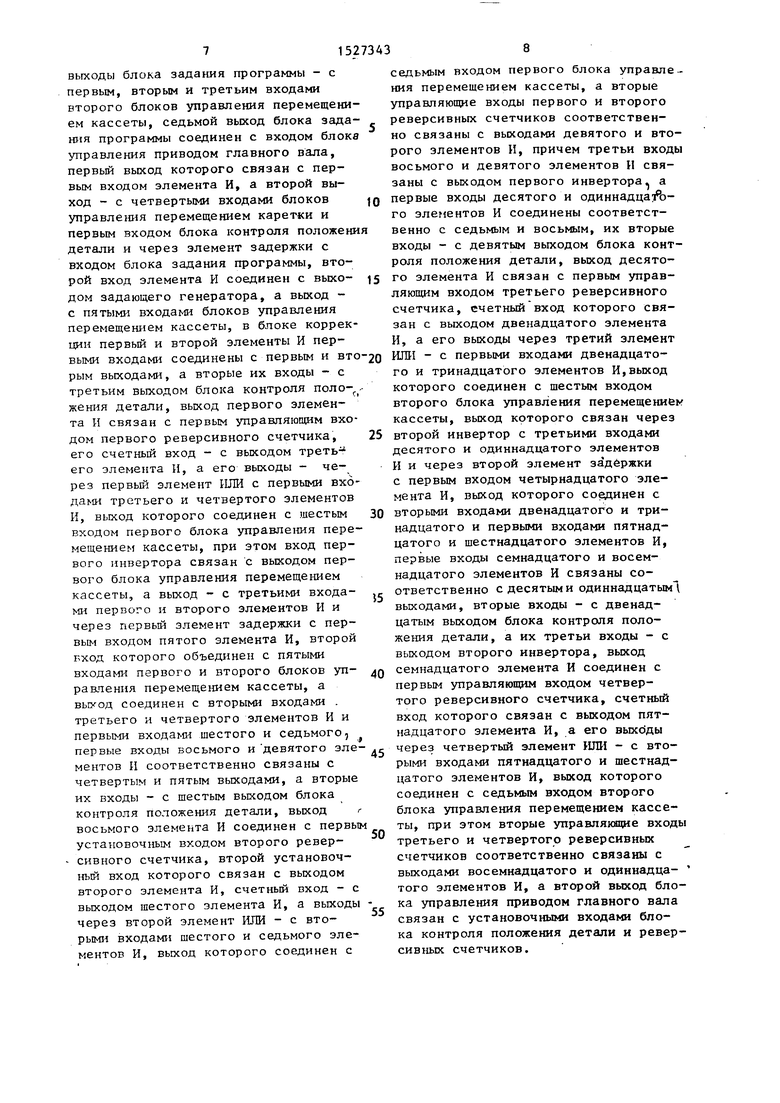
Устройство управления швейной машиной, содержащее блок контроля положения детали, блок задания прог- раммы, блоки управления перемещением кассеты во взаимно перпендикулярных направле1шях, блок управления приводом главного вала и блок коррекции, отличающееся тем, что, с целью повьш1ения точности управления, оно имеет задающий генератор, элемент задержки, элемент И, а блок коррекции содержит реверсивные счетчики, элементы ИЛИ, элементы задерж
55
ки и элементы И, причем первый, второй и третий выходы блока задания программы связаны соответственно с первым, вторым и третьим входами первого, а четвертый, пятый и шестой
выходы блока задания программы - с первым, вторым и третьим входами второго блоков управления перемещением кассеты, седьмой выход блока задания программы соединен с входом блоке управления приводом главного вала, первый выход которого связан с первым входом элемента И, а второй выход - с четвертыми входами блоков управления перемещением каретки и первым входом блока контроля положени детали и через элемент задержки с входом блока задания программы, второй вход элемента И соединен с выходом задающего генератора, а выход - с пятыми входами блоков управления перемещением кассеты, в блоке коррекции первьй и второй элементы И перседьмым входом первого блока управления перемещением кассеты, а вторые управляющие входы первого и второго реверсивных счетчиков соответственно связаны с выходами девятого и второго элементов И, причем третьи входы восьмого и девятого элементов И связаны с выходом первого инвертора, а
первые входы десятого и одиннадцат Ь- го элементов И соединены соответственно с седьмым и восьмым, их вторые входы - с девятым выходом блока контроля положения детали, выход десятого элемента И связан с первым управляющим входом третьего реверсивного счетчика, счетный вход которого связан с выходом двенадцатого элемента И, а его выходы через третий элемент
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления однопрограммным швейным полуавтоматом | 1987 |
|
SU1557218A1 |
| Устройство для определения местоположения края детали на швейной машине | 1987 |
|
SU1497308A1 |
| Устройство для считывания графической информации | 1977 |
|
SU742981A1 |
| Устройство для считывания графической информации | 1977 |
|
SU711600A2 |
| Цифровая следящая система | 1978 |
|
SU744439A1 |
| Устройство для резания материала на отрезки | 1978 |
|
SU859148A1 |
| Устройство для отрезания материала заданной длины | 1978 |
|
SU746000A1 |
| Швейная машина с программным управлением | 1986 |
|
SU1641913A1 |
| Устройство для управления швейной машиной | 1984 |
|
SU1201374A1 |
| Устройство стабилизации скорости резания для токарных станков с ЧПУ | 1983 |
|
SU1136112A1 |
Изобретение относится к средствам управления и может быть использовано на швейных машинах. Цель изобретения - повышение точности управления. Устройство содержит блок задания программы, блоки управления приводом главного вала, перемещения кассеты с деталью по осям X и Y и коррекции. По сигналу тактирующего датчика происходит сброс предыдущего кадра программы с регистра цифроаналогового преобразователя, затем этот сигнал поступает в оперативное запоминающее устройство, откуда очередной кадр программы управляет частотой вращения двигателя главного вала. Величина отклонения детали от заданного фиксируется в блоке контроля положения детали, откуда считывается и преобразуется блоком коррекции в управляющий сигнал, поступающий на блоки управления перемещением кассеты по осям X и Y. 5 ил.
Быми входами соединены с первым и вто-2о ИШ1 - с первыми входами двенадцаторым выходами, а вторые их входы - с третьим вьпсодом блока контроля положения детали, выход первого элемента Н связан с первым управляющим входом первого реверсивного счетчика, его счетный вход - с выходом треть- его элемента Н, а его выходы - через первый элемент ИЛИ с первыми входами третьего и четвертого элементов И, выход которого соединен с шестым входом первого блока управления перемещением кассеты, при этом вход первого инвертора связан с выходом первого блока управления перемещением кассеты, а выход - с третьими входами первого и второго элементов И и через первый элемент задержки с первым входом пятого элемента И, второй вход которого объединен с пятыми входами первого и второго блоков уп- раапения перемещением кассеты, а выход соединен с вторыми входами . третьего и четвертого элементов И и первыми входами шестого и седьмого, первые входы восьмого и девятого элементов П соответственно связаны с четвертым и пятым выходами, а вторые их входы - с шестым выходом блока контроля положения детали, выход г восьмого элемента И соединен с первым установочным входом второго реверсивного счетчика, второй установочный вход которого связан с выходом второго элемента И, счетный вход - с выходом шестого элемента И, а выходы через второй элемент ИЛИ - с вторыми входами шестого и седьмого элементов И, выход которого соединен с
0
го и тринадцатого элементов И,выход которого соединен с шестым входом второго блока управления перемещением кассеты, выход которого связан через 5 второй инвертор с третьими входами десятого и одиннадцатого элементов И и через второй элемент задержки с первым входом четырнадцатого элемента И, выход которого соединен с вторыми входами двенадцатого и тринадцатого и первыми входами пятнадцатого и шестнадцатого элементов И, первые входы семнадцатого и восемнадцатого элементов И связаны соответственно с десятым и одиннадцатым выходами, вторые входы - с двенадцатым выходом блока контроля положения детали, а их третьи входы - с выходом второго инвертора, выход семнадцатого элемента И соединен с первым управляющим входом четвертого реверсивного счетчика, счетный вход которого связан с выходом пятнадцатого элемента И, а его выходы через четвертый элемент ИЛИ - с вторыми входами пятнадцатого и шестнадцатого элементов И, выход которого соединен с седьмым входом второго блока управления перемещением кассеты, при этом вторые управляющие входы третьего и четвертого реверсивных счетчиков соответственно связаны с выходами восемнадцатого и одиннадца- того элементов И, а второй выход блока управления приводом главного вала связан с установочными входами блока контроля положения детали и реверсивных счетчиков.
0
5
0
5
-Q
Фиг г
н
Редактор В. Петраш
QJUt.S
Составитель Б. Быковский Техред М.Ходанич
Заказ 7488/38
Тираж 398
ВГОйШИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Фиг.З I
I I
Фиг.
Корректор С. Черни
Подписное