Известны автоматические захваты по авт. св. К 136873, состоящие из двух лап, шарнирно соединенных со щеками обоймы. Внутри обоймы расположено фиксирующее устройство положения лап на смыкание и размыкание захвата, выполненное в виде клинового ползуна, подвещенного к несуи:ей траверсе, и фиксирующей защелки, насаженной на ось и петлю.
Петля свободно проходит в наклонном вырезе тела ползуна. Однако известные захваты не обеспечивают захват груза при опоре лан на грунт.
Настоящее изобретение представляет собой развитие и дальнейшее совершенствование изобретения по авт. св. JN 136873.
Отличительной особенностью описываемого автоматического захвата является то, что между щеками обоймы закрепляется неподвижная Планка с зубом и в щеках делаются прорези для ocii фиксирующей противовесной защелки.
Такое изменение в конструкции захвата позволило обеспечить захват груза не только при контакте щек обоймы с грузом, но и при контакте захватных лап с грунтом.
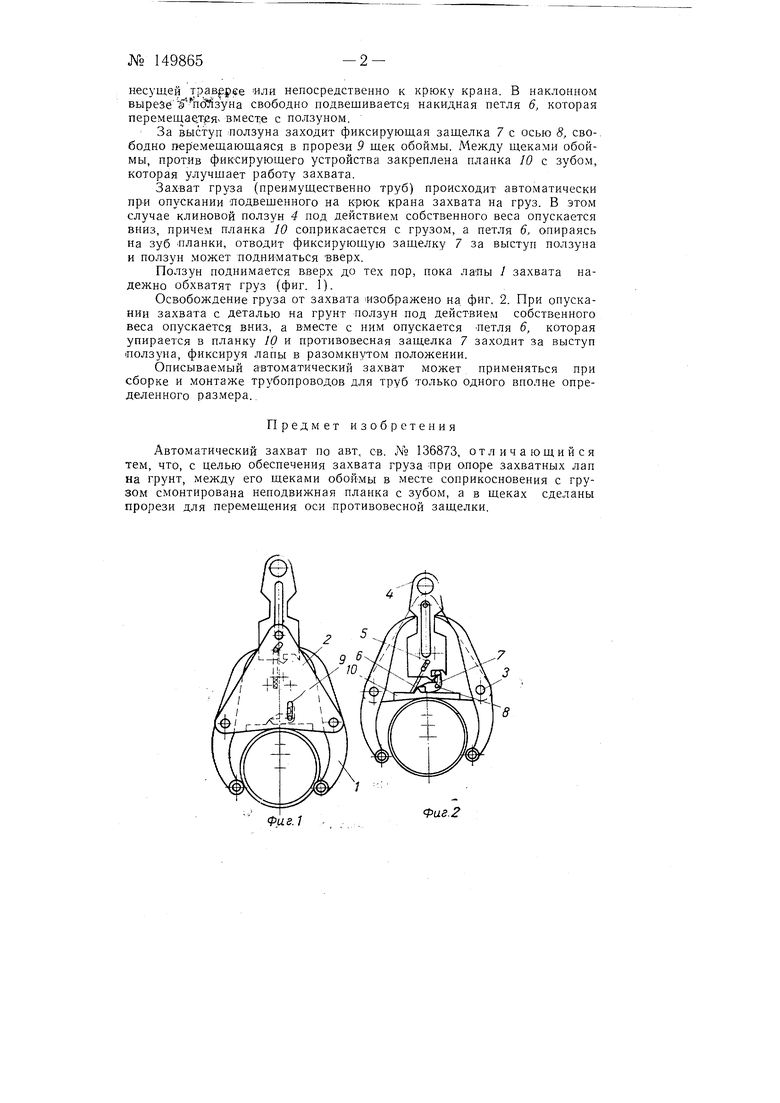
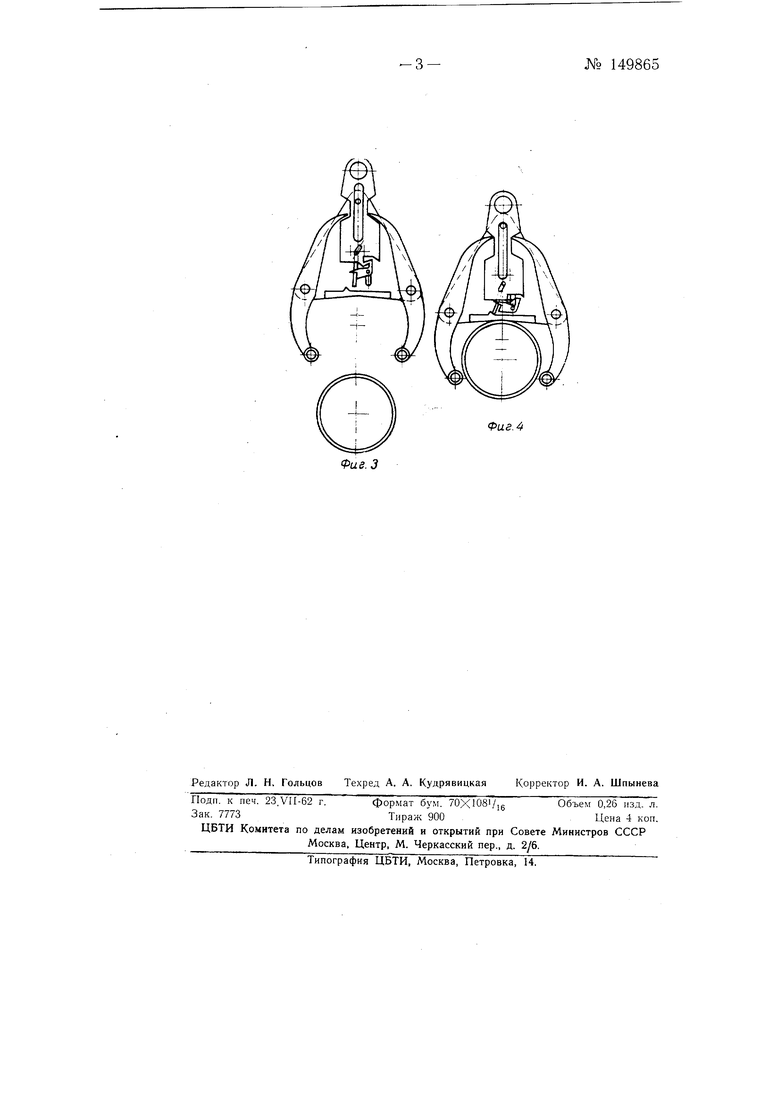
На фиг. 1 изображен автоматический захват груза в момент подъема; на фиг. 2 -положение, когда груз опущен на грунт и захват находится в разомкнутом положении; на фиг 3-положение порожнего захвата на весу; на фиг. 4 -положение захвата в момент смыкания его лап на грузе.
Автоматический захват состоит из двух лап /, которые смонтированы на щеках 2 обой-мы с помощью щарниров 3. Внутри обоймы перемещается клиновой ползун 4, за который захват иодвещивается к
несущей «ли непосредственно к крюку крана. В наклонном вырезе поЙзуна свободно подвешивается накидная петля 6, которая перемещае.. вместе с ползуном.
За выст-уп :ползуна заходит фиксирующая защелка 7 с осью 8, сво-. бодно перемещающаяся в прорези 9 щек обоймы. Между щеками обоймы, против фиксирующего устройства закреплена планка }0 с зубом, которая улучщает работу захвата.
Захват груза (преимущественно труб) происходит автоматически прИ опускании лодвещенного на крюк крана захвата на груз. В этом случае клиновой ползун 4 под действием собственного веса опускается вниз, причем планка 10 соприкасается с грузом, а петля 6, опираясь на зуб лланки, отводит фиксирующую защелку 7 за выступ ползуна и ползун может подниматься вверх.
Ползун поднимается вверх до тех пор, пока лапы / захвата надежно обхватят груз (фиг. 1).
Освобождение груза от захвата изображено на фиг. 2. При опускании захвата с деталью на грунт ползун под действием собственного веса опускается вниз, а ВМесте с ним опускается летля 6, которая упирается в планку 10 и противовесная защелка 7 заходит за выступ ползуна, фиксируя лапы в разомкнутом положении.
Описываемый автоматический захват может применяться при сборке и монтаже трубопроводов для труб только одного вполне определенного размера..
Предмет изобретения
Автоматический захват по авт, св. № 136873, отличающийся тем, что, с целью обеспечения захвата груза при опоре захватных лап на грунт, между его щеками обойМы в месте соприкосновения с грузом смонтирована неподвижная планка с зубом, а в щеках сделаны прорези для перемещения оси противовесной защелки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический захват | 1959 |
|
SU127797A1 |
| Одноканатный грейфер | 1960 |
|
SU139415A1 |
| Автоматический захват | 1973 |
|
SU506567A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ | 1966 |
|
SU178465A1 |
| Захватное устройство для грузов сошТыРЕМ и фигуРНОй гОлОВКОй | 1979 |
|
SU816935A1 |
| Захват-кантователь для грузовцилиНдРичЕСКОй фОРМы | 1979 |
|
SU850544A2 |
| Захватное устройство для штучных грузов | 1981 |
|
SU1065325A1 |
| Грузозахватное устройство | 1977 |
|
SU676532A2 |
| Автоматический захват | 1981 |
|
SU1020350A1 |
| Грузозахватное устройство | 1990 |
|
SU1744036A1 |
(pus.l
Фае. 2
Фие.4
