Известные автоматические захваи). подвешиваемые к грузоподъемному крану и снабженные устройетвом для фиксации захватных крюков в раскрытом и закрытом положениях, не обеспечивают захвата маломерных по ширине грузов типа балок и колонн.
Описываемый ав1юматнческий захват отличается от известных тем. что применение его для захвата маломерных по ширине грузов тина балок и колонн обеспечивается использованием для раскрытия и закрытия крюков клиноЕого ползуна, выполненного с пазами для воздействия на хвостовики крюков при вертикальном его перемещении и вмонтированного между щеками обоймы, несущей осп крюков, а также фнксирующего устройства, выполненного в виде защелки. Защелка удерживает своим зубом «линовой нолзун от вертикального перемещения при раскрытых захватных клещах и освобождает его npi; посадке захвата на груз путем воздействия на ее хвостовик нетли. Петля свободно подвешена в наклонном вырезе, выполненном в теле ползуна и являющемся направляющей для перемещения петли прн взаимодействин ее с поверхностью груза.
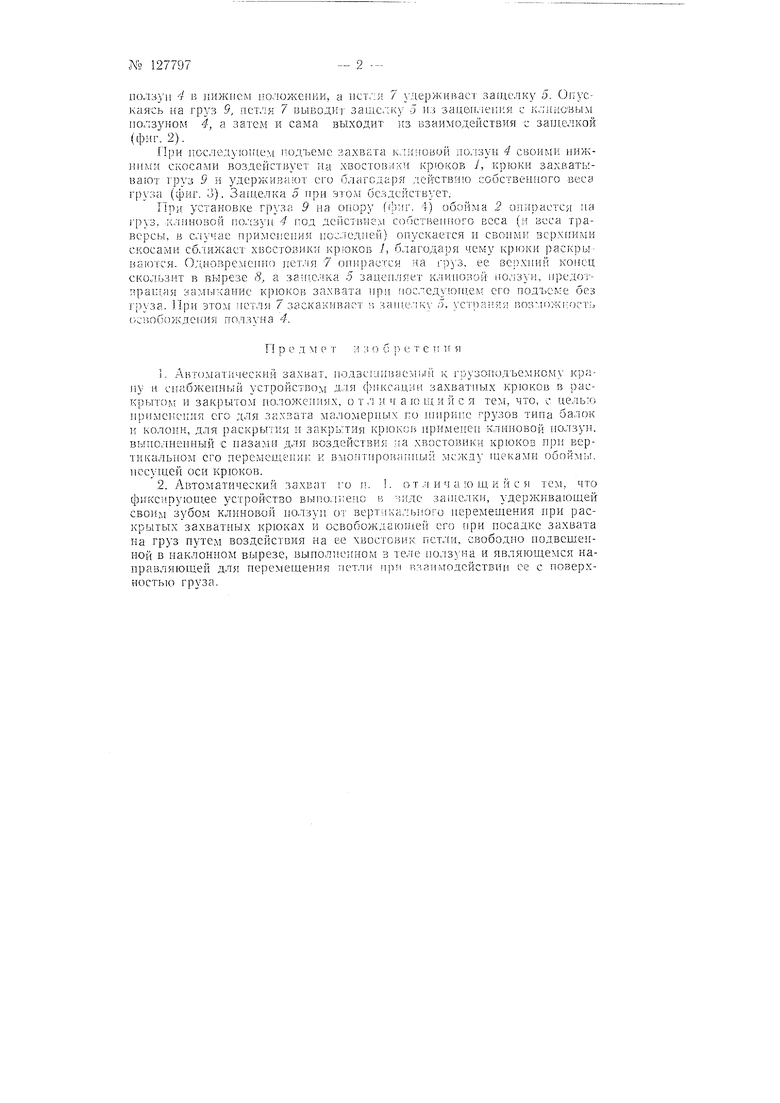
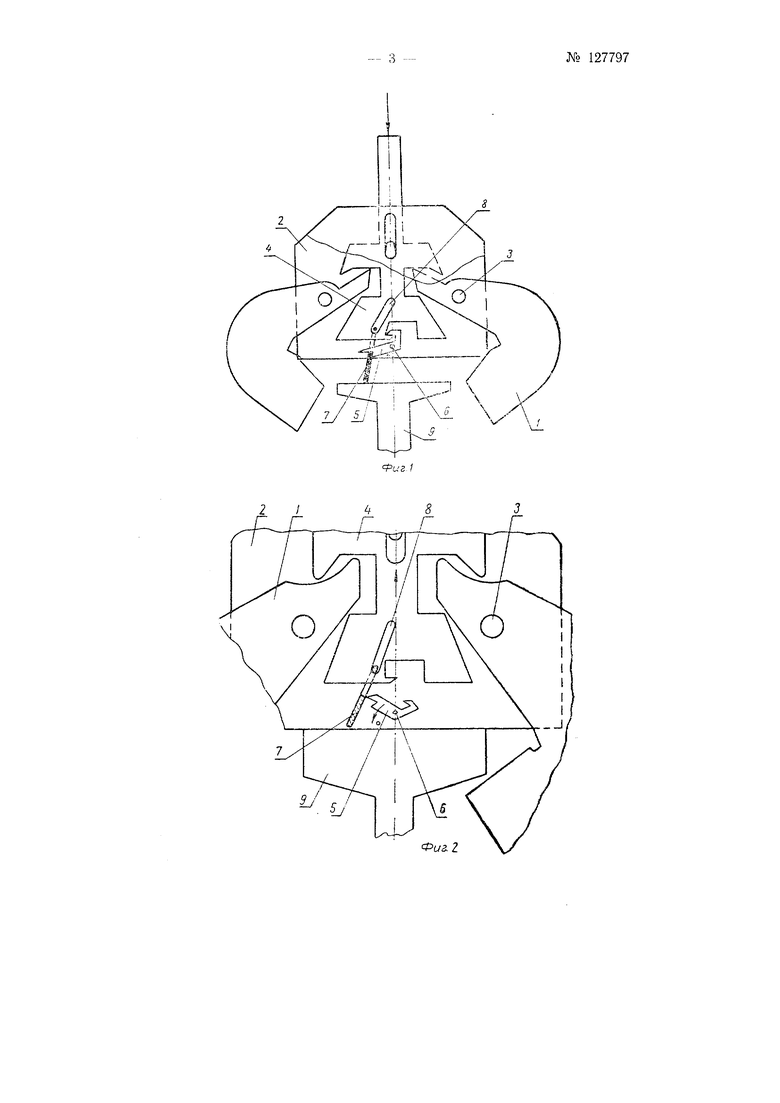
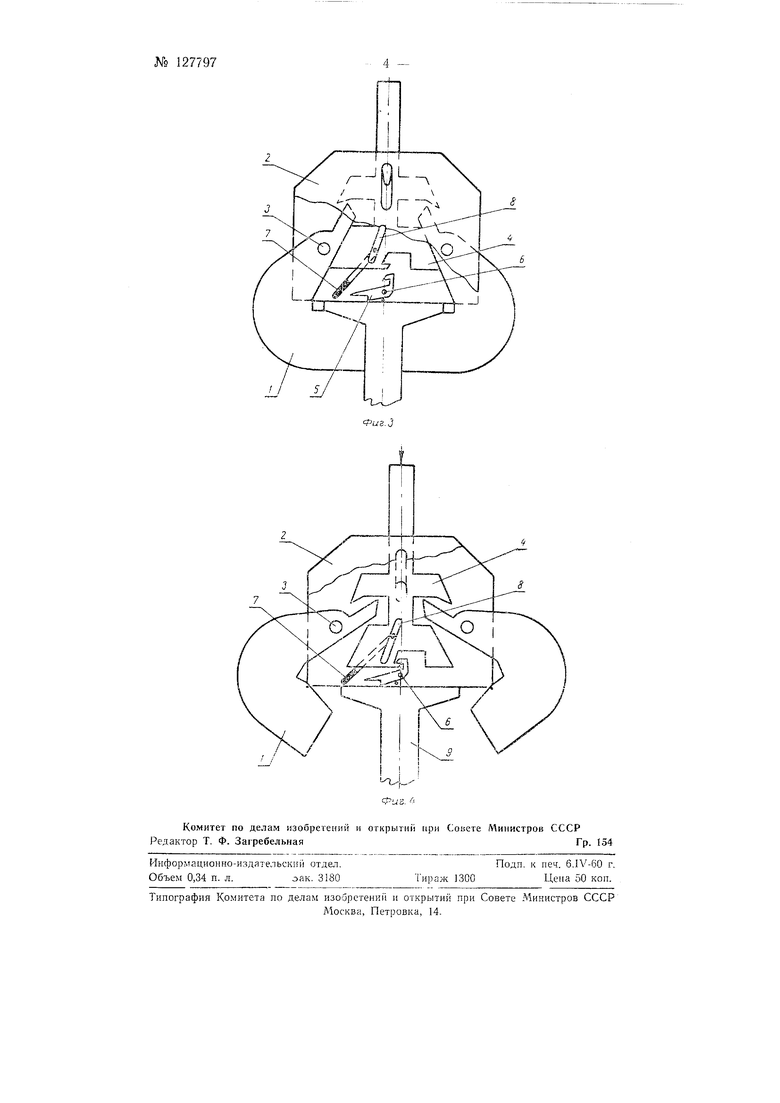
На фиг. 1 изображена схема захватывания груза захватом; на фиг. 2-схема освобождения защелки; на фиг. 3-схема удерживания груза в поднятом положении; на фиг. 4-схема освобождения захвата от груза.
Автоматический захват для маломерных но ширине грузов состоит из крюков /, соединенных с щеками обоймы 2 при помощи шарниров 5, клинового ползуна 4, подвешиваемого к траверсе или непосредственно на крюк грузоподъемного крана, фиксирующей защелки 5, насаженной на ось 6, и петли 7, свободно подвешенной в наклонном вырезе 8, выполненном в теле ползуна 4.
Для захвата груза 9 (фиг- 1) захват опускается на него в открытом положении, когда крюки / разведены, защелка 5 фиксирует клиновой
ползуном 4, a затем и сама выходит кз взаимодействия (фи1 2).
При пОСледукянем подъеме захвата клиновой ползун 4 своими нижними скосами воздействует на хвостовики крюков 1, крюки захватывают труз 9 и удерживают его благодаря действию собственного веса г()уза (фиг. 3). Защедка 5 при этом бездействует.
При установке груза 9 на опору ((Ьпг. 4) обойма 2 опирается на , кл11новой по.тзун 4 под действием сопстве1ни)го веса (и веса траверсы, в с.тучае примеиепи пос тедней) опускается и своими верхними скосамн сб..тижает хвостовики кроков 1, благодаря чему крЮКИ раскрыBSiOTCH. Одновре},енно пет.тя 7 опирается на груз, ее верхний конец скользит в вырезе 8, а запгелка 5 задеиляет клиионой ползун, иредотпраиг.ая аамьгссаиие крюков захвата ирт rlOcлeдy OIи.e( его иодТ) без груза. При этОАГ петля 7 заскакивает н зап1е. Я, устра Яя возможность освобождепия ползуна 4.
Пред м е т и з о б п е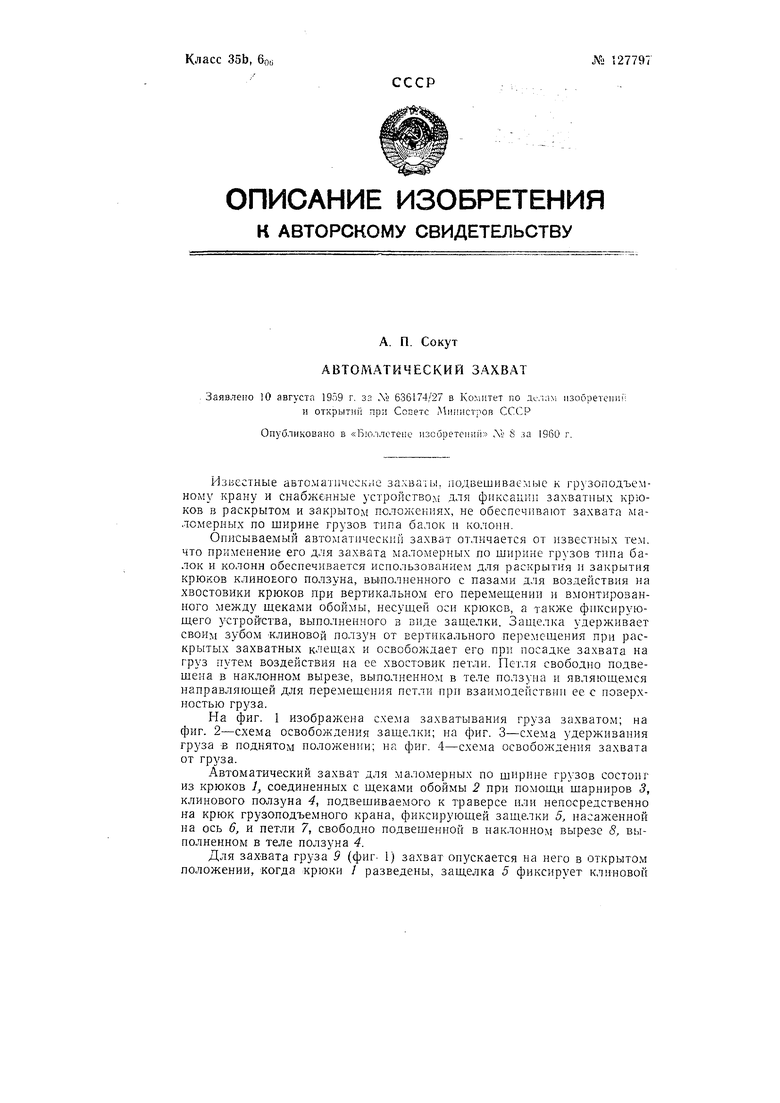
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический захват | 1961 |
|
SU149865A1 |
| Одноканатный грейфер | 1960 |
|
SU139415A1 |
| Рельсовый захват | 1988 |
|
SU1527129A1 |
| Автоматический захват | 1981 |
|
SU1020350A1 |
| Клещевой захват | 1977 |
|
SU703467A1 |
| Захват для штучных грузов | 1959 |
|
SU133996A1 |
| ОДНОКАНАТНЬШ ГРЕЙФЕР КУРСКИЙ | 1967 |
|
SU192383A1 |
| ГРУЗОВАЯ ТРАВЕРСА | 2001 |
|
RU2214961C2 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| ГРУЗОВОЙ КРЮК | 2002 |
|
RU2227116C2 |
крытом и закрытом подожеииях, отличающийся тем. что, с цедь:о прнмепеиия его для захвата маломериы.х по nnipniie грузов типа балок и колонн, для раскрытия и закрытия крюко Т1рнмеиеп клиповой ползун, выполненный с иазамн для воздействия иа хвостовики крюков ири вертикальном его перемещении и вмоптированный между птеками обойл1Ь, несущей оси крюков.
2 I
Фиг. 2
