/;
с
ее ее
Изобретение относится к машиностроению, а именно к средствам упругой связи исполнительного органа с основанием, и найдет применение, в частности, в устройИсполнительный орган (не показан) закрепляют на платформе 2. При возмущениях, воздействующих на платформу 2, возникают только ее линейные перемещения,
ствах, где требуется стабилизация углового воспринимаемые пружиной 3. Это объясположения исполнительного органа.
Цель изобретения - упрощение конструкции механизма за счет замены сдвоенных шарнирно-рычажных параллелограм
няется тем, что щарнирно-рычажные щести- звенники легко деформируются в плоскости расположения стержней 4 и 5 (складываются или растягиваются) и имеют боль- щую жёсткость против крутильных колемов на
более простые и технологичные баний платформы 2. Благодаря такой конструкции подвески платформа 2 совершает только линейные перемещения относительно основания 1, сохраняя постоянное угловое положение.
шарнирно-рычажные щестизвенники.
На чертеже показана конструктивная схема механизма.
Шарнирно-рычажный механизм содержит основание 1 и платформу 2, подпружиненную к основанию 1 пружиной 3. Платформа 2 кинематически связана с основанием 1 по меньшей мере тремя шарнир- но-рычажными шестизвенниками, осесим- метрично расположенными на основании 1 так, что их плоскости образуют многогранный угол. Каждый шестизвенник включает в себя параллельные основанию стержни
Формула изобретения
20
Шарнирно-рычажный механизм подвески, содержащий основание, подпружиненную к нему платформу и по меньшей мере три шарнирно-рычажных многозвенника с симметричным расположением звеньев, предназначенные для связи платформы с основанием и расположенные на последнем, так что их плоскости образуют соответ4 и 5 и две пары идентичных пластин 6 и 7. 25 вующии многогранник, оглычаюи ийся тем. Стержень 4 шарнирно связан с Пv aтфopмoй что, с целью упрощения конструкции, много- 2, а стержень 5 - с основанием 1. Пластины звенники выполнены в виде шестизвенни- 6 и 7 каждой пары шарнирно связаны од- ков, каждый из которых включает в себя ними концами между собой, а другими два параллельных основанию стержня, шар- концами соответственно со стержнями 4 и 5. нирно связанных один с основанием, а дру- Пластины 6 и 7 могут быть как параллель- 30 гой - с платформой, и две пары пластин, ны, так и не параллельны друг другу, при этом пластины каждой пары шарнирно но всегда перпендикулярны плоскости, в ко- связаны одними концами между собой, а торой расположены оси шарниров, связы- другими концами - с соответствующими ваюших стержни 4 и 5 соответственно стержнями и перпендикулярны плоскости, с платформой 2 и основанием 1.в которой расположены оси шарниров.
Механизм работает следующим обра- 35 связывающих стержни с платформой и ос- зом.нованием.
Исполнительный орган (не показан) закрепляют на платформе 2. При возмущениях, воздействующих на платформу 2, возникают только ее линейные перемещения,
воспринимаемые пружиной 3. Это объясняется тем, что щарнирно-рычажные щести- звенники легко деформируются в плоскости расположения стержней 4 и 5 (складываются или растягиваются) и имеют боль- щую жёсткость против крутильных коле баний платформы 2. Благодаря такой конструкции подвески платформа 2 совершает только линейные перемещения относительно основания 1, сохраняя постоянное угловое положение.
Формула изобретения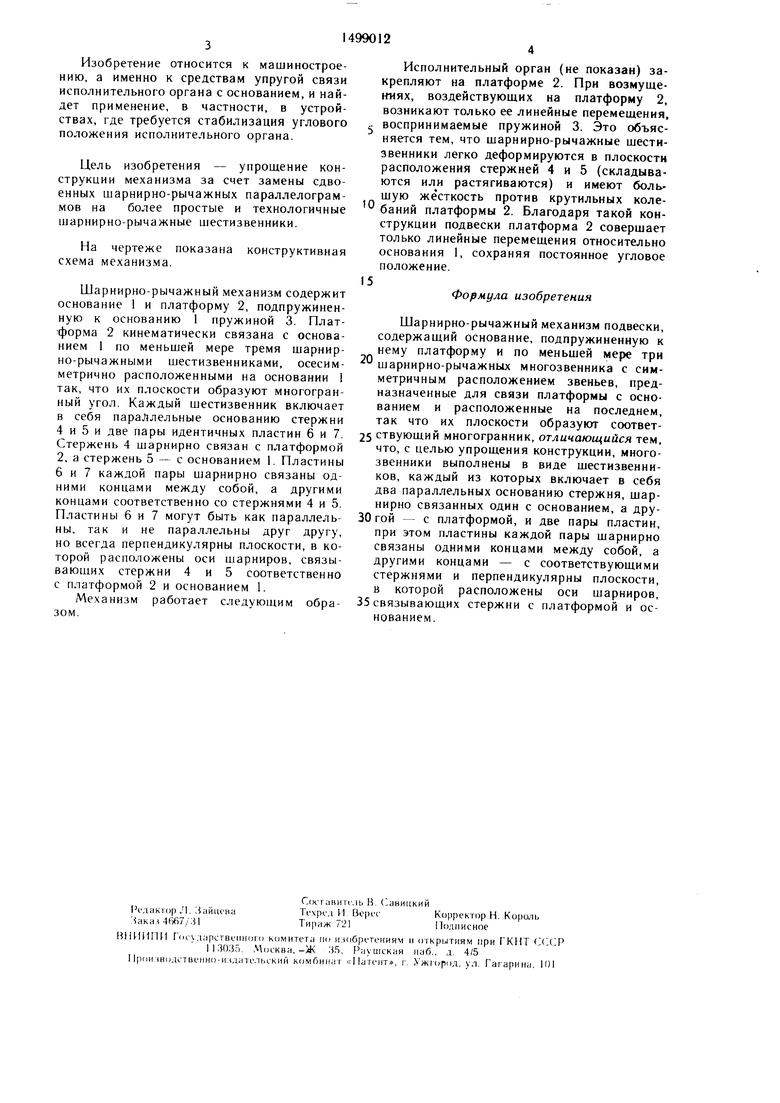
| название | год | авторы | номер документа |
|---|---|---|---|
| СКЛАДЫВАЮЩИЙСЯ СИММЕТРИЧНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2023 |
|
RU2821637C1 |
| Виброзащитная опора | 1988 |
|
SU1726869A2 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ И ВИБРОИЗОЛЯТОР | 1995 |
|
RU2091630C1 |
| ПАУТИННЫЙ ШАРНИРНЫЙ МЕХАНИЗМ | 2024 |
|
RU2830218C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ ОТ КОЛЕБАНИЙ УПРУГОЙ КОНСТРУКЦИИ КОСМИЧЕСКОЙ ТРАНСФОРМИРУЕМОЙ АНТЕННЫ В ПРОЦЕССЕ ЭКСПЛУАТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2161109C1 |
| Виброзащитная подвеска | 1988 |
|
SU1672035A1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| Промышленный робот к штамповочному прессу | 1985 |
|
SU1355330A1 |
| Пространственный регулируемый рычажный механизм | 1986 |
|
SU1315696A1 |
| Виброзащитная опора | 1987 |
|
SU1578396A1 |
Изобретение относится к механизмам упругой связи исполнительного органа с основанием и найдет применение ,в частности, в устройствах, где требуется стабилизация углового положения исполнительного органа. Цель изобретения - упрощение конструкции механизма за счет замены сдвоенных шарнирно-рычажных параллелограммов на более простые и технологичные шарнирно-рычажные шестизвенники. При возмущениях воздействующих на платформу 2 стержни 4, 5 и пластины 6, 7 легко деформируются в плоскости расположения стержней 4 и 5 (складываются или растягиваются) и имеют большую жесткость против крутильных колебаний платформы 2, поэтому она совершает только линейные плоско параллельные перемещения, воспринимаемые пружиной 3, и сохраняет постоянное угловое положение. 1 ил.
| Патент Англии № 1308105, к.п | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
