113
Изобретение относится к обработке металлов давлением и может быть использовано для подачи штучных заготовок в рабочую зону штамповочного пресса.
Целью изобретения является повышение надежности работы.
На чертеже изображена кинематическая схема промышленного робота к штамповочному прессу.
Промышленный робот содержит основание 1 с вертикальными направляюш;им 2, колонну 3, установленную в направляющих 2 с возможностью перемещения в вертикальном направлении, руку 4 с направляющими 5, закрепленную на лонне 3, штангу 6, установленную в направляющих 5 с возможностью перемещения в горизонтальном направлении схват 7, закрепленный на штанге 6, вал 8, вал 9 с шестернями 10 и 11, приводной вал 12 с шестернями 13 и 14, шестерню 15, установленную на валу 8, который является валом прес- са (не показан), ведомый вал 16,установленный в опоре 17 и несущий шестерню 18 и кривошип 19, двуплечий рычаг 20, шарнирно закрепленный в сф е- ре 21, шатун 22, шарнирно связываю- щий кривошип 19 с одним из концов двуплечего рычага 20, серьгу 23,шарнирно связывающую колонну 3 со свободным концом двуплечего рычага 20, кривошип 24, закрепленный на валу 12, поворотный рычаг 25, шарнирно закрепленный при помощи оси 26 на основании 1, шатун 27, шарнирно связывающий рычаг 25 с кривошипом 24,ось 28, закрепленную на основании 1 соос но оси 26, водило 29, установленное на оси 28, ось 30, установленную на основании 1 соосно валу 12, приводно рычаг 31, установленный на оси 30, тягу 32, шарнирно связывающую рычаг 25 с рычагом 31, тягу 33, шарнирно связывающую водило 29 с рычагом 31. На штанге 6 закреплен вертикально стержень 34, по которому перемещается ползун 35, шарнирно связанный с водилом 29.
Промышленный робот работает следующим .образом.
От вала 8 через шестерни 10 и 15 зубчатой передачи, вал 9, шестерни 11 и 14 приводится в движение вал 12. Вал 12 через шестерни 13 и 18, вал 16 приводит в движение кривошип
ю
15 0 25 о Q
5
0
5
К)2
19, который через шатун 22, двуплечий р)1чаг 20 и серьгу 23 приводит в движение по вертикальным направляющим 2 колонну 3 с рукой 4. Одновременно вал 12 через кривошип 2А,шатун 27, рычаг 25, тягу 32, рычаг 31, тягу 33 приводит в движение водило 29 вокруг оси 28. Водило через ползун 35 и стержень 34 приводит-в движение штангу 6 со схватом 7,
Формула изобретения
Промьш1ленный робот к штамповочному прессу, снабженному приводом, содержащий колонну, смонтированную на основании с возможностью, возвратно-поступательного перемещения в вертикальном направлении, руку, закрепленную на колонне, штангу с схватом, установленную в руке с возможностью возвратно-поступательного перемещения в горизонтальном направлении, механизм вертикального перемещения руки и механизм горизонтального перемещения штанги, отличающийся тем, что, с целью повышения надежности работы, механизм вертикального перемещения руки выполнен в виде приводного и ведомого валов, связанных между собой зубчатой передачей, кривошипа, закрепленного на ведомом валу, двуплечего рычага, шарнирно закрепленного на основании, шатуна, шарнирно связывающего кривошип с одним из концов двуплечего рычага, и серьги,шарнирно связывающей колонну со свободным концом двуплечего рычага, механизм горизонтального перемещения штанги выполнен в виде дополнительного кривошипа, закрепленного на приводном валу, поворотного рычага, шарнирно смонтированного на основании, дополнительного шатуна, шарнирно связывающего поворотный рычаг с дополнительным кривошипом, приводного рычага, шарнирно закрепленного на основании соосно с приводным валом, тяги, шарнирно связывающей поворотный рычаг с приводным рычагом, водила, шарнирно смонтированного на основании соосно с поворотным рычагом, дополнительной тяги, шарнирно связывающей водило с приводным рычагом, стержня, вертикально закрепленного на штанге, ползуна, подвижно установленного на стержне и ;шарнирно связанного с водилом.
Г5- Л
/J
1333 330
гз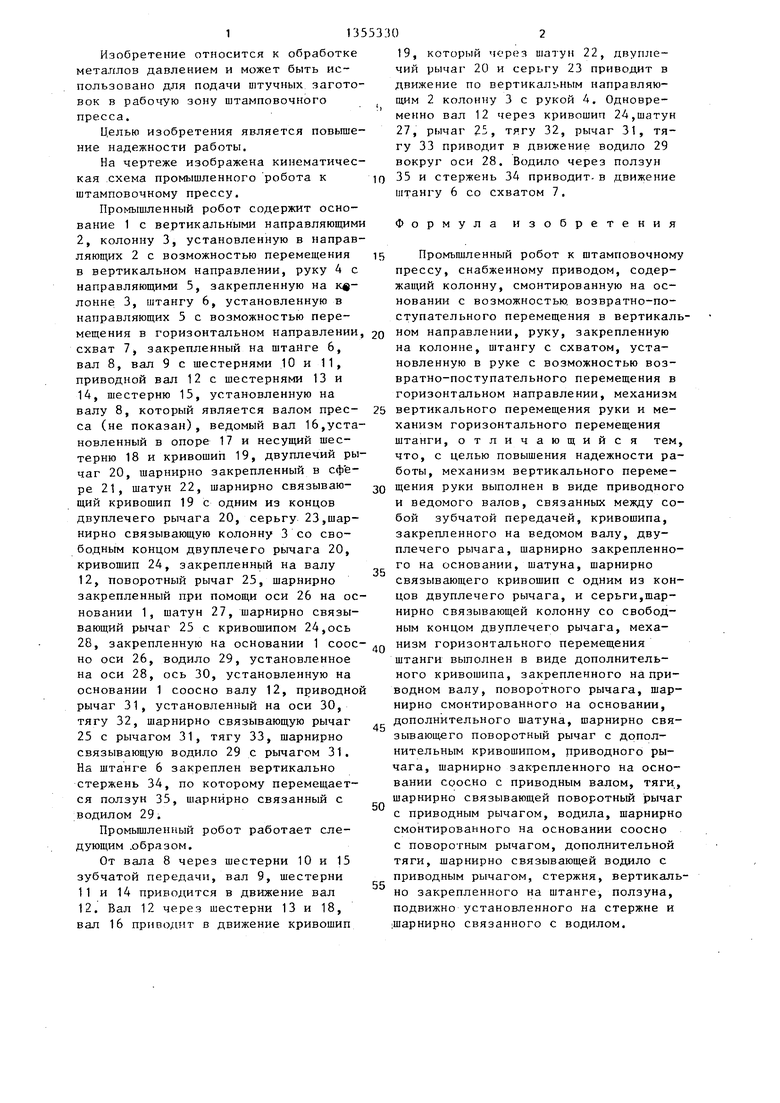
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Робот к листоштамповочному прессу | 1986 |
|
SU1465158A1 |
| МАНИПУЛЯТОР | 1992 |
|
RU2022772C1 |
| Устройство для шаговой подачи заготовок в зону обработки | 1984 |
|
SU1346306A1 |
| Линия для многопереходной штамповки деталей из листового материала | 1987 |
|
SU1433587A1 |
| Станок для пробивки в ленте отверстий и последующей намотки ее в рулон | 1979 |
|
SU1114322A3 |
| Промышленный робот | 1983 |
|
SU1129069A1 |
| Устройство для подачи длинномерного материала в зону обработки | 1990 |
|
SU1731372A1 |
| Манипулятор | 1986 |
|
SU1328187A1 |
| Робот к листоштамповочному прессу | 1978 |
|
SU795935A1 |

Изобретение относится к обработке металлов давлением и может быть использовано для подачи изделий к штамповочному прессу. Целью изобретения является повышение надежности в работе за счет обеспечения возможности движения руки промышленного робота ,с остановками в двух крайних нижних положениях. Заготовки подаются в рабочую зону пресса схватом, закрепленным на.штанге, установленной с возможностью возвратно-поступательного перемещения в горизонтальном направлении. Рука закреплена на колонне,установленной на основании с возможностью возвратно-поступательного перемещения в вертикальном направлении. Штанга приводится в движение от приводного вала через шарнирно-рычажный восьми- звенник, а колонка - от приводного вала через зубчатую передачу и рычаж- ный шестизвенник. Использование в устройстве рычажных исполнительных механизмов позволяет повысить быстродействие роботов, а также надежность их в работе. 1 ил. (Л со ел СП оо ОО О
| Камьшный Н.И | |||
| Автоматизация загрузки станков | |||
| М.: Машиностроение, 1977, с | |||
| Арматура для железобетонных свай и стоек | 1916 |
|
SU259A1 |
| Металлические подъемные леса | 1921 |
|
SU242A1 |
