11
Изобретение относится к машиностроению и может быть использовано в автоматах, рабочие органы которых за один оборот ведомого звена совершают возвратные движения с остановкой в одном из положений или же болб. двух возвратно-качательных движений (ходов).
Цель изобретения - расширение кинематических возможностей механизма путем обеспечения как движения ведомого звена с остановками, так и двух четырех или шести возвратно-кача- тельньсх движений (ходов) ведомого звена без остановок.
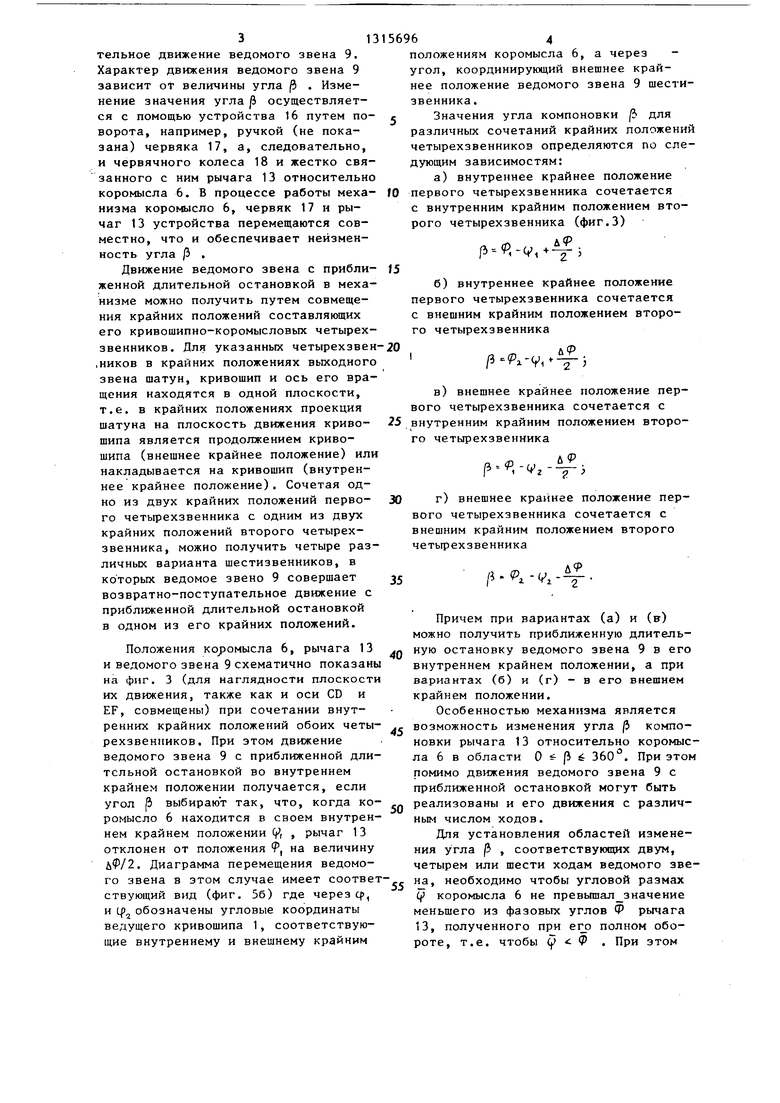
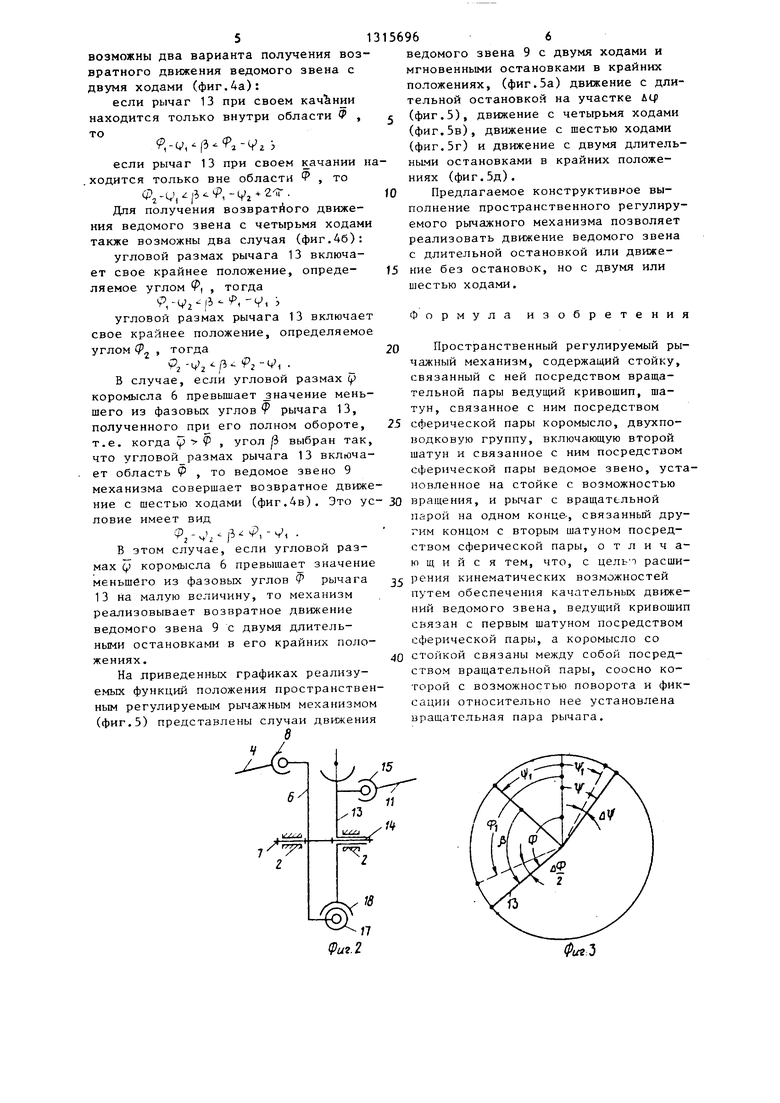
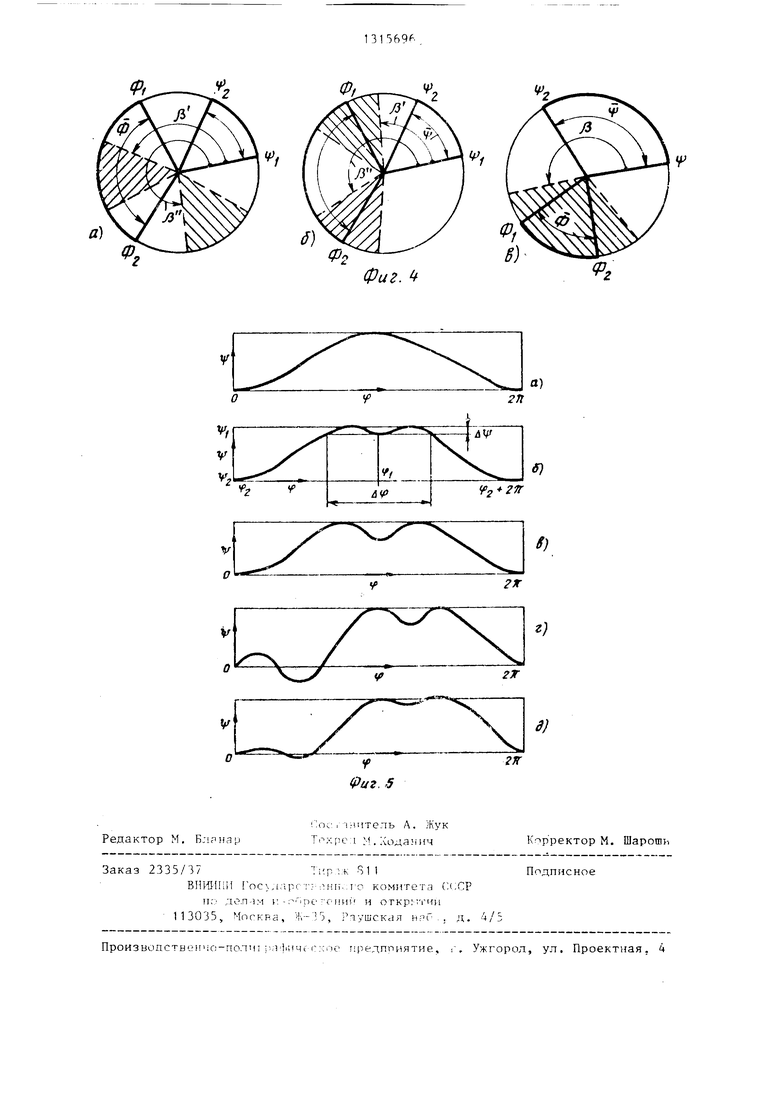
На фиг. 1 представлена кинематическая схема механизма; на фиг. 2 - кинематическая схема устройства для изменения и фиксации угла между рычагом и коромыслом; на фиг. 3 - схема к определению угла между рычагом и коромыслом при движении ведомого звена с остановками в одном, например во внутреннем, крайнем положении; на фиг. 4 - схема к определению количества ходов ведомого звена; на фиг. 5 - графики реализуемых механизмов функций положений ведомого звена
Пространственный регулируемый рычажный механизм содержит пространственный четырехзвенник, включающий ведущий кривошип 1 и стойку 2, соединенные с помощью вращательной пары 3, шатун 4, соединенный с ведущим кривошипом с помощью сферической пары 5, и коромысло 6, образующее со стойкой и шатуном соответственно вращательную и сферическую пары 7 и 8 и двухповодковую группу, включающую ведомое звено 9, образующее со стойкой вращательную пару 10, и второй шатун I1, образующий с ведомым звеном сферическую пару 12, а также рычаг 13, образующий со стойкой и вторым шатуном соответственно вращательную и сферическую пары 14 и 13.
Вращательные пары 7 и 14 установлены с.оосно, а изменение угла компоновки р (т.е. угла между коромыслом 6 и рычагом 13, измеренного в плоскости, перпендикулярной к оси АВ их вращения) осуществляется устройством 16 для изменения и фиксации значения угла компоновки, которое содержит червяк 17 (фиг.2), установленный на коромысле 6 с возможностью вращения, и взаимодействующее с ним червячное колесо 18, жестко связанное
62
с рычагом 13, т.е. механизм представяет собой шестизвенник, состоящий из двух последовательно соединенных пространственных четырехзвенников типа В сев (В - вращательная пара, С - сферическая пара).
На схемах приняты следующие обозначения:
ОХ, CD и EF - оси перпендикуляр- ные осям вращательных пар;
tfi Y углы поворота ведущего кривошипа 1 и ведомого звена 9, отсчитываемые от осей, параллельных оси ОХ; (I P - углы, координирующие положение коромысла 6 и рычага 13 относительно осей, параллельных оси ОХ-, Vi )Т углы, координирующие внутренние крайние положения коромысла 6 и ведомого звена 9 щестизвенника; Ф) - угловая координата рычага 13, соответствующая внутреннему крайнему положению ведомого звена 9 отдельно взятого второго четырех- звенника при полном оборо- те рычага 13;
- угол поворота рычага 13 и коромысла 6, соответствующий требуемой приближенной остановке ведомого зве- на 9;
ДТ угол размаха ведомого звена 9 на участке приближенной остановки;
Pj - угловая координата рычага
13, соответствующая внешнему крайнему положению ведомого звена 9 отдельно взятого второго четырех- звенника при полном обороте рычага 13; (f - угол, коардинирующий внешнее крайнее положение ко ромысла 6.
Механизм работает следующим обра- зон.
Вращение ведущего кривошипа 1 с помощью шатуна 4 преобразуется в воз- вратно-качательное движение коромысла 6 и жестко фиксированного относитель- но него (посредством устройства 16) рычага 13. Качательное движение рычага 13 посредством второго шатуна 11 преобразуется в возвратно-качательное движение ведомого звена 9, Характер движения ведомого звена 9 зависит от величины угла |3 . Изменение значения угла осуществляется с помощью устройства 16 путем по- с ворота, например, ручкой (не показана) червяка 17, а, следовательно, и червячного колеса 18 и жестко свя ванного с ним рычага 13 относительно коромысла 6. В процессе работы меха- 10 низма коромысло 6, червяк 17 и рычаг 13 устройства перемещаются совместно, что и обеспечивает неизменность угла /1 ,
Движение ведомого звена с прибли- J5 женной длительной остановкой в механизме можно получить путем совмещения крайних положений составляющих его кривошипно-коромысловых четырех- звенников. Для указанных четырехзвен-20
,НИКОВ в крайних положениях выходного звена шатун, кривошип и ось его вращения находятся в одной плоскости, т.е. в крайних положениях проекция
положениям коромысла 6, а через - угол, координирующий внешнее крайнее положение ведомого звена 9 шести- звенника.
Значения угла компоновки р для различных сочетаний крайних положений четырехзвенников определяются по сле дующим зависимостям:
а)внутреннее крайнее положение первого четырехзвенника сочетается
с внутренним крайним положением второго четырехзвенника (фиг.З)
,-(,.i
б)внутреннее крайнее положение первого четырехзвенника сочетается с внешним крайним положением второго четырехзвенника
,i
I
в) внешнее крайнее положение первого четырехзвенника сочетается с шатуна на плоскость движения криво- 25 внутренним крайним положением второ- шипа является продолжением криво- го четырехзвенника шипа (внешнее крайнее положение) или накладывается на кривошип (внутреннее крайнее положение). Сочетая одно из двух крайних положений перво- 30 го четырехзвенника с одним из двух крайних положений второго четырехзвенника, можно получить четыре различных варианта шестизвенников, в ко торых ведомое звено 9 совершает
p-,-v,-
г) внешнее крайнее положение первого четырехзвенника сочетается с внешним крайним положением второго четырехзвенника
35
.-V.-.
возвратно-поступательное движение с приближенной длительной остановкой в одном из его крайних положений.
Причем при вариантах (а) и (р) можно получить приближенную длитель40
Положения коромысла 6, рычага 13 и ведомого звена 9 схематично показаны на фнг. 3 (для наглядности плоскости их движения, также как и оси CD и EF, совмещены) при сочетании внутренних крайних положений обоих четы- возможность изменения угла /5 компо- рехзвенииков. При этом движение новки рычага 13 относительно коромысную остановку ведомого звена 9 в его внутреннем крайнем положении, а при вариантах (б) и (г) - в его внешнем крайнем положении.
Особенностью механизма является
ведомого звена 9 с приближенной длительной остановкой во внутреннем крайнем положении получается, если угол |3 выбирают так, что, когда коромысло 6 находится в своем внутреннем крайнем положении , , рычаг 13 отклонен от положения , на величину Л Р/2. Диаграмма перемещения ведомого звена в этом случае имеет соответствующий вид (фиг. 5б) где через q), и Lp,j обозначены угловые координаты ведущего кривошипа 1, соответствующие внутреннему и внешнему крайним
50
55 1
ла 6 в области О р ЗбО. При этом помимо движения ведомого звена 9 с приближенной остановкой могут быть реализованы и его движения с различным числом ходов.
Для установления областей изменения угла |3 , соответствуюш 1х двум, четырем или шести ходам ведомого звена, необходимо чтобы угловой размах if коромысла 6 не превьт1ал значение меньшего из фазовых углов Ф рычага 13, полученного при его полном обороте, т.е. чтобы Ф . При этом
положениям коромысла 6, а через - угол, координирующий внешнее крайнее положение ведомого звена 9 шести- звенника.
Значения угла компоновки р для различных сочетаний крайних положений четырехзвенников определяются по следующим зависимостям:
а)внутреннее крайнее положение первого четырехзвенника сочетается
с внутренним крайним положением второго четырехзвенника (фиг.З)
,-(,.i
б)внутреннее крайнее положение первого четырехзвенника сочетается с внешним крайним положением второго четырехзвенника
,i
I
в) внешнее крайнее положение первого четырехзвенника сочетается с внутренним крайним положением второ- го четырехзвенника
p-,-v,-
г) внешнее крайнее положение первого четырехзвенника сочетается с внешним крайним положением второго четырехзвенника
в) внешнее крайнее пол вого четырехзвенника соч внутренним крайним полож го четырехзвенника
.-V.-.
Причем при вариантах (а) и (р) можно получить приближенную длительвозможность изменения угла /5 компо- новки рычага 13 относительно коромыс
возможность изменения угла /5 компо- новки рычага 13 относительно коромысную остановку ведомого звена 9 в его внутреннем крайнем положении, а при вариантах (б) и (г) - в его внешнем крайнем положении.
Особенностью механизма является
возможность изменения угла /5 компо- новки рычага 13 относительно коромыс
1
ла 6 в области О р ЗбО. При этом помимо движения ведомого звена 9 с приближенной остановкой могут быть реализованы и его движения с различным числом ходов.
Для установления областей изменения угла |3 , соответствуюш 1х двум, четырем или шести ходам ведомого звена, необходимо чтобы угловой размах if коромысла 6 не превьт1ал значение меньшего из фазовых углов Ф рычага 13, полученного при его полном обороте, т.е. чтобы Ф . При этом
возможны два варианта получения возвратного движения ведомого звена с двумя ходами (фиг.4а):
если рычаг 13 при своем качЬнии находится только внутри области , то
,-V,(3- P.-Vzi
если рычаг 13 при своем к ачании н .ходится только вне области Ф , то
2-4 получения возвратАого движения ведомого звена с четырьмя ходами также возможны два случая (фиг.Аб):
угловой размах рычага 13 включает свое крайнее положение, определяемое углом Ф| , тогда
V ,V2(, i
угловой размах рычага 13 включает свое крайнее положение, определяемое
углом Ф тогда
9, Pj-w i . в случае, если угловой размах ( коромысла 6 превьшает значение меньшего из фазовьк углов Ф рычага 13, полученного при его полном обороте, т.е. когда J; Ф , угол выбран так, что угловой размах рычага 13 включает область Ф , то ведомое звено 9 механизма совершает возвратное движение с шестью ходами (фиг.4в). Это ус- 30 вращения, и рычаг с вращательной
-
3156966
ведомого звена 9 с двумя ходами и мгновенными остановками в крайних положениях, (фиг.За) движение с длительной остановкой на участке Лср (фиг.5), движение с четырьмя ходами (фиг.Зв), движение с шестью ходами (фиг.Зг) и движение с двумя длительными остановками в крайних положениях (фиг.5д).
to Предлагаемое конструктивное выполнение пространственного регулируемого рычажного механизма позволяет реализовать движение ведомого звена с длительной остановкой или движе15 ние без остановок, но с двумя или шестью ходами.
Формула изобретения
Пространственный регулируемый рычажный механизм, содержащий стойку, связанный с ней посредством вращательной пары ведущий кривошип, шатун, связанное с ним посредством
сферической пары коромысло, двухпо- нодковую группу, включающую второй шатун и связанное с ним посредством сферической пары ведомое звено, установленное на стойке с возможностью
ловие имеет вид
Ф,-ч И| -
В этом случае, если угловой размах ( коромысла 6 превышает значение меньшего из фазовых углов Ф рычага 13 на малую величину, то механизм реализовывает возвратное движение ведомого звена 9 с двумя длительными остановками в его крайних положениях.
На приведенных графиках реализуемых функций положения пространственным регулируемым рычажным механизмом (фиг.5) представлены случаи движения
8 Ч
;х
7
Ри.2
парой на одном конце-, связанный другим концом с вторым шатуном посредством сферической пары, отличающийся тем, что, с цель т расшиj 1эения кинематических возможностей путем обеспечения качательных движений ведомого звена, ведущий кривошип связан с первым шатуном посредством сферической пары, а коромысло со
0 стойкой связаны между собой посредством вращательной пары, соосно которой с возможностью поворота и фиксации относительно нее установлена вращательная пара рычага.
3
v
фаг. 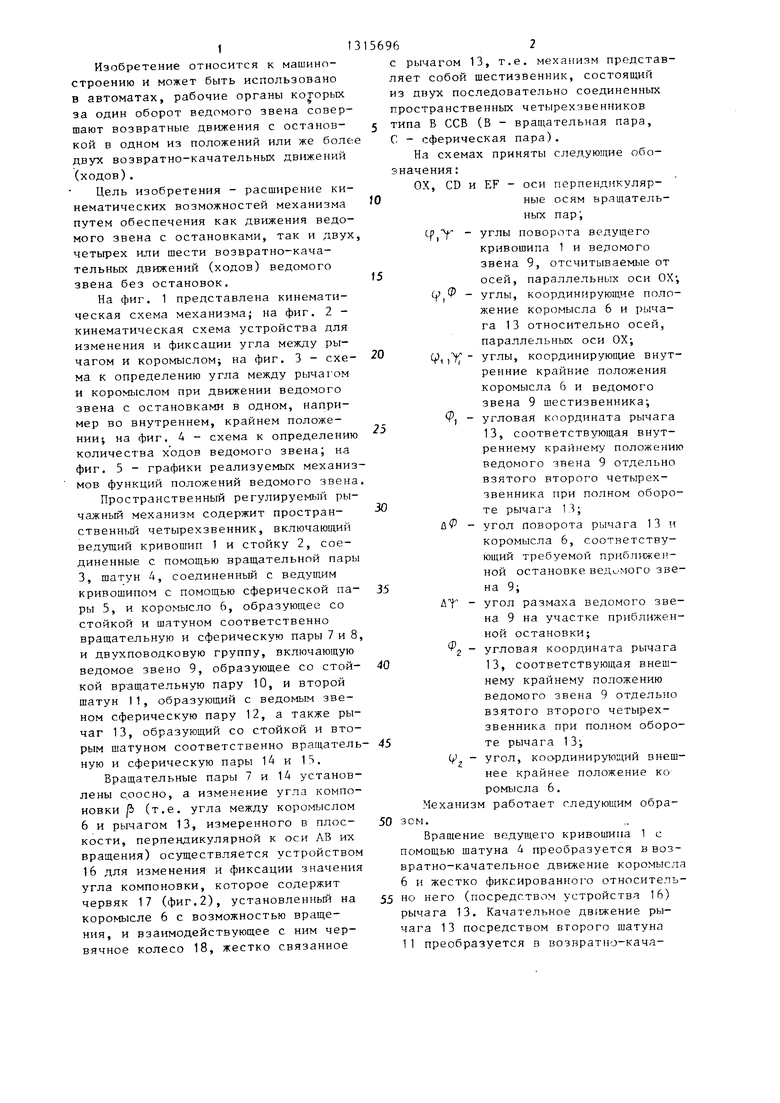
| название | год | авторы | номер документа |
|---|---|---|---|
| Пространственный рычажный механизм с периодическими остановками | 1985 |
|
SU1307134A1 |
| Пространственный рычажный механизм с периодическими остановками | 1991 |
|
SU1809209A1 |
| ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ С ВЫСТОЯМИ | 1991 |
|
RU2019767C1 |
| СКЛАДЫВАЮЩИЙСЯ МНОГОКРАТНЫЙ КРИВОШИПНО-КОРОМЫСЛОВЫЙ МЕХАНИЗМ | 2024 |
|
RU2833554C1 |
| Пространственный рычажныйМЕХАНизМ C пЕРиОдичЕСКОйОСТАНОВКОй | 1978 |
|
SU796574A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1803654A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2011 |
|
RU2478473C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| Кривошипно-шатунный механизм | 2014 |
|
RU2613748C2 |
Изобретение относится к машиностроению и может быть использовано в автоматах, рабочие органы которых совершают возвратные движения с остановкой в одном положении или более двух качательных движений. Цель изобретения - расширение кинематических возможностей путем обеспечения качательных движений ведомого звена. Пространственный регулируемый рычажный механизм содержит ведущий кривошип 1 и стойку 2, соединенные посредством вращательной пары 3, шатун 4, соединенный с ведущим кривошипом X с помощью сферической пары 5, и коромысло 6, связанное со стойкой 2 и шатуном 4 вращательной и сферической парами 7 и 8 соответственно. Двух- поводковая группа механизма состоит из ведомого звена 9, связанного со стойкой посредством вращательной пары 10, и второго шатуна 11, связанного с ведомым звеном 9 при помощи сферической пары 12. Рычаг 13 образует со стойкой вращательную пару 14 и с вторым шатуном - сферическую пару 15. Вращательные пары 7 и 14 установлены СООСНО с возможностью ПОБОрота и фиксации относительно друг друга посредством устройства 16.Вращательное движение ведущего кривошипа 1 посредством шатуна 4, коромысла 6, рычага 13, второго отатуна 11 передается ведомому звену 9. При этом в зависимости от угла поворота рычага 13 oiносительно коромысла 6 ведомое звено 9 совершает либо возвратное движение с длительной остановкой в одном положении, либо два, четыре или шесть качательных движений без остановок. 5 ил. С в (Л со Q1 О5 со О5
V
х:7
г;
г-т
V о
у
г.
Редактор М. Бллнар
I ii K I т/штель А. Жук t. Ходаяич
Заказ 2335/37Тир ; к 811
ВИШНИ Гос ,:ipcr;-;M H., комитета СССР
II. ДОЛ.1М и - n- ipe ЧЧ1НИ и откр;гг1-ги 113035, Москва, Ж-З З, Рчушскс1л , . д. 4/5
Производствеичс1-поли1 р Пфич r::i)e предприятие, г. Ужгород, уд. Проектная. 4
;
7
Корректор М. Шарошь
Подписное
| Пространственный рычажныйМЕХАНизМ C пЕРиОдичЕСКОйОСТАНОВКОй | 1978 |
|
SU796574A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
