ел
3 . 150 Изобретение относится к телеизмерениям .и может применяться в телемеханике, дальней связи и в системах автоматического контроля.
Цель изобретения - повышение достоверности передаваемой информации,
На чертеже приведена функциональная блок-схема предлагаемого устройства.
Передающее устройство адаптивной телеизмерительной системы содержит датчики l.-t., преобразователи 2-2. погрешности аппроксимации (ППА), ключи 3,-3( , анализатор 4 погрешностей (АП), аналого-цифровой преобразователь (АЦЕ) 5, измерители 6,-6 мгновенной частоты, цифровые фильтры (ЦФ) , первый и второй мультиплексоры 8 и 9, первый и второй фор- мирователи 10 и 11 обратных кодов, сумматор 12, перемножители 13 и 14 вычитатели 15 и 16, блок 17 считьшаг ния, блок 18 памяти.
Датчики 1 преобразуют входные те- леметрируемые параметры в нормированный сигнал, например в напряжение постоянного тока.
Преобразователи 2-2 погрешности аппроксимации определяют значе- ние текущей погрешности аппроксимации сигналов, поступаклцих с датчи- ков 1-1j. Ключи 3-3 fj осуществляют подключение выхода датчиков к входу АЦП 5 по управляющему сигналу.
Анализатор погрешносте,й определяет номер датчика 1-1 и погрешность аппроксимации сигнала которого наит большая. На первые входы АП 4 посту- пают значения текущей погрешности аппроксимации от ППА 2-21 , а на второй вход - с блока 17,который оповещает АП 4 о конце передачи информации в линию связи. На первых выходах АЛ 4 формируется сигнал, который выбирает датчик с максимальной погрешностью, а на вторых выходах - адрес этого датчика.
АЦП 5 преобразует входную аналоговую величину в двоичный код. рители мгновенной частоты определяют значения мгновенной частоты дискретизации сигналов (т.е. частоту опроса датчика). Цифровые фильтры осуществляют фильтрацию обратных величин длительностей интервалов дискретизации сигналов. Эт и фильтры легко реализуются на основе сдвиговых регистров и сумматоров.
4
Мультиплексоры 8 и 9 осуществляют выбор в соответствии с адресом, пришедшим на управляющие (вторые) входы одного из каналов, и подключение его к входу формирователей 10 и 11.
Формирователи 10 и 18 обратньпс величин осуществляют преобразование входной величины у (мгновенная часто.1
та) в выходную величину - - интервал
временной дискретизации. Обе величины у и - представляют собой двоичные
коды.
Блок 11 считывания используется для преобразования параллельного кода (значение отсчетов и адрес датчика) на входах в последовательный код на выходе.
Блок 18 памяти хранит значения предыдущих переданных отсчетов в ячейках памяти с адресами, соответствующими адресам датчиков например К565РУЗ (4).
Устройство адаптивной системы работает следующим образом. . .. .
Сигналы от датчиков 1-11 поступают на входы соответствующих пре- образователей 2-2 „ погрешности аппроксимации, которые определяют те- кушую погрешность.Эти погрешности сравниваются между собой в анализаторе 4. погрешностей По результату этого сравнения анализатор 4 выделяет датчик с наибольшей погрешностью аппроксимации и подключает к АЦП 5 с помощью ключей 3, сбрасывает преобразователи 2-2 в нуль и вьфабатывает адрес этого датчика. Сигналы, вырабатываемые анализатором 4 для управления преобразователей 2-2 и ключами 3-3 служат также для определения мгновенной частоты дискретизации сигналов,поступающих с датчиков. Частота появления этих сигналов определяется с помощью измерителей 6-6 мгновенной частоты. Значение измеренной частоты поступает на .соответствующий цифровой фильтр 7-7. Отфильтрованное значение частоты дискретизации сигнала через первый мультивибратор 8 поступает на первый формирователь 10, на выходе которого появляется новое отфильтрованное значение интервала дискретизации. Это значение сравнивается в первом вычитателе
5
15 с неотфильтрованным значением интервала дискретизации, которое поступает от измерителей мгновенной ча тоты 6-6 через второй мультиплексор 9 и второй формирователь 11 обратных пазов на вход уменьшаемого (второй вход) блока 15 разности.Син фазность работы мультиплексоров 8 и 9 обеспечивается подачей на управляющие входы адреса опрашиваемого датчика, вьфабатываемого АЛ А. Разность, формируемая вычитателем 15, представляет собой приращение временного интервала, вызванное действием помехи.Предьщущий, переданный . в линию связи отсчет от данного датчика извлекается из блока 18 памяти который хранится в ячейке с адресом датчика и передается во второй вычи- татель 16, где отсчет сравнивается с текущим отсчетом, поступающим от датчиков 1-1 через АЦП 5. Полученная разность значений отсчетов последовательно умножается на приращение временного интервала и на отфильтрованные обратные значения интервала дискретизации с помощью перемножителей 13 и 14. В результате этих действий получают поправку значения отсчета, которую вводят в результат измерения с помощью сумматора 12. Скорректированное значение запоминается в блоке 18 памяти и передается в блок 17 считьшания, который принимает отсчет и адрес датчика в па- I
раллельном коде, преобразует эту информацию в последовательней код и передает ее в линию связи. По завершении передачи информации блок 17 считывания вырабатывает управляющий сигнал для АП 4, который разрешает опрос следующего датчика. .
Формула-изобретения
Передающее устройство адаптивной телеизмерительной системы, содержащее датчики, выходы которых соединены с первыми входами соответствующих преобразователей погрешности аппроксимации и ключей, выходы которых объединены и подключены к вхо- ду аналого-цифрового преобразователя, выходы преобразователей погрешности аппроксимации соединены с со- ответствуюш 1ми первыми входами ана501117
a
5
0
5
0
5
0
5
0
5
лизатора погрешностей, первые выходы которого соединены с объединенными вторыми входами соответствующих преобразователей погрешности аппроксимации и ключей, вторые выходы анализатора погрешностей соединены с соответствующими первыми входами блока считывания, первый и второй выходы которого соответственно являются выходом устройства и подключен к второму входу анализатора погрешностей, отличающе еся тем, что, с целью повышения достоверности передаваемой информации, в устройство введены блок памяти, вычитатели, сумматор, перемножители, формирователи обратных кодов, измерители мгновенной частоты, цифровые фильтры и мультиплексоры, входы измерителей мгновенной частоты подключены к соответ- ствуюш 1м первым выходам анализатора погрешностей, выходы измерителей мгновенной частоты соединены через одноименные цифровые фильтры с первыми входами первого мультиплексора и непосредственно - с первыми входами второго мультиплексора, вторые входы которого объединены с соответствующими вторьгми входами первого мультиплексора и первыми входами блока памяти и подключены к соответствующим вторым выходам анализатора погрешностей, вьпсоды первого мультиплексора соединены непосредственно с первыми входами первого перемножителя и через одноименньй формирователь обратных кодов - с первыми входами первого вы- читателя, выход второго мультиплексора соединен через одноименный формирователь обратных кодов с вторыми входами первого вычитателя, выходы которого соединены с первыми входами второго перемножителя, выходы которого соединены с вторыми входами первого перемножителя, выходы первого перемножителя соединены с первыми входами сумматора, выходы которого соединены с вторыми входами блока считывания и блока памяти, выходы которого соединены с первыми входами второго вычитателя, выходы которого соединены с вторыми входами второго перемножителя, выходы аналого-цифрового преобразователя соединены с вторыми входами второго вычитателя и сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ адаптивной временной дискретизации и устройство для его осуществления | 1983 |
|
SU1095390A1 |
| Устройство для определения взаимной корреляционной функции | 1990 |
|
SU1751779A1 |
| Передающее устройство адаптивной телеизмерительной системы | 1981 |
|
SU955164A1 |
| Демодулятор сигналов с фазоразностной модуляцией | 1980 |
|
SU949838A1 |
| Устройство для передачи телеметрической информации | 1986 |
|
SU1336077A1 |
| Цифровой измеритель коэффициента корреляции случайного сигнала | 2020 |
|
RU2747725C1 |
| Цифровой фазометр | 1979 |
|
SU879498A1 |
| УСТРОЙСТВО УСКОРЕННОЙ СИНХРОНИЗАЦИИ ПРИЕМНИКА ШУМОПОДОБНЫХ СИГНАЛОВ С МИНИМАЛЬНОЙ ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ | 2011 |
|
RU2446560C1 |
| Устройство для адаптивного скользящего сглаживания | 1986 |
|
SU1387017A1 |
| Анализатор спектра Фурье | 1985 |
|
SU1302293A1 |
Изобретение относится к информационно-измерительной технике и может быть использовано в телемеханике, дальней связи, в системах автоматического контроля. Цифровая фильтрация значений величин, пропорциональных временным интервалам между обращениями к датчикам, и введение поправок в передаваемые отсчеты позволяют повысить достоверность конечной информации. Устройство содержит датчики 11 - 1N, преобразователи 21 - 2N погрешности аппроксимации, ключи 31 - 3N, анализатор 4 погрешностей, аналого-цифровой преобразователь 5, измерители 61 - 6N мгновенной частоты, цифровые фильтры 71 - 7N, мультиплексоры 8, 9, формирователи 10, 11 обратных кодов, сумматор 12, перемножители 13, 14, вычитатели 15, 16, блок 17 считывания, блок 18 памяти. 1 ил.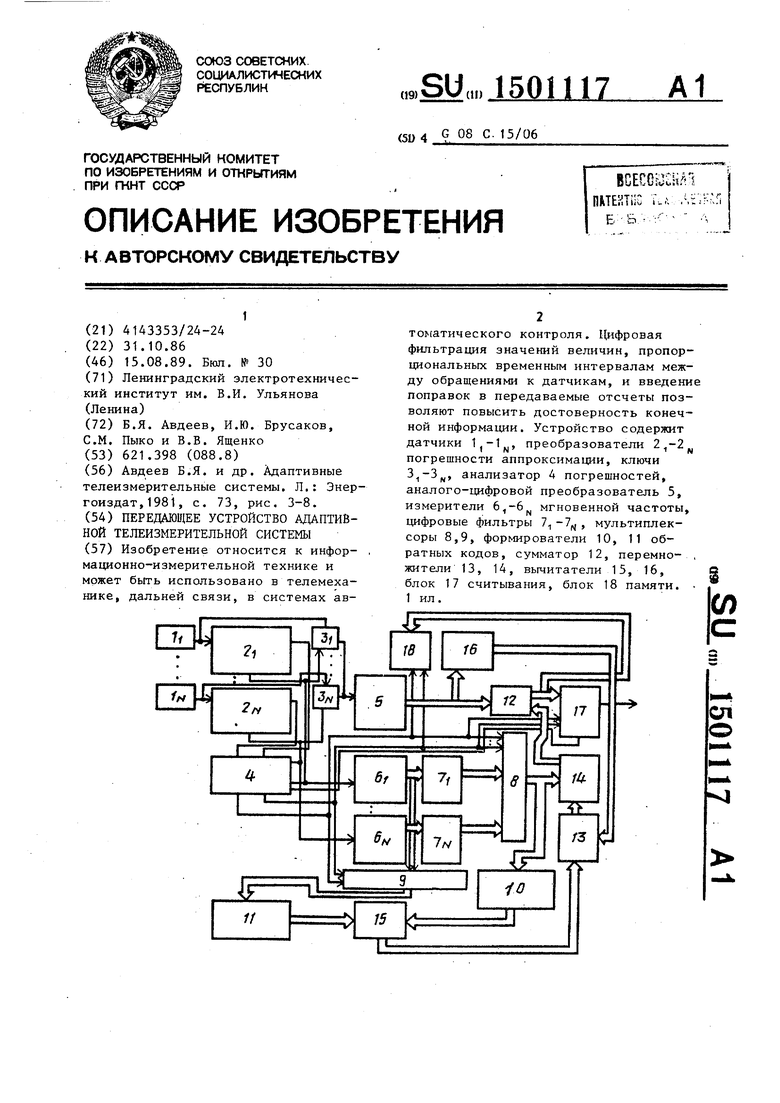
| Авдеев Б.Я | |||
| и др | |||
| Адаптивные телеизмерительные системы | |||
| Л.: Энер- гоиздат,1981, с | |||
| Способ подготовки рафинадного сахара к высушиванию | 0 |
|
SU73A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
