СП
о
N9
4
31502
7.1, ..., 7n. Измерители 2.1, ..., 2n выходами соединены с входами блока 3 задания ускорения, выход которого подк:1ючен к входам нелинейных элементов (НЭ) i.1, ..., , через интеграторы 5.1, ..., 5п соединенных с блоками 6,1,..., 6п управления. Дпя последовательного пуска К в направлении, противоположном грузопо- току, устаноБленнь е на хвостовых барабанах всех К, кроме первого, датчики 8.2, ..., 8п трогания соединены выходами с входами бесконтактных выключателей (БКВ) 9.1, ..., 9(п-1). Запуск конвейерной линии производится устройством не в функции времени, а по моменту трогания, фиксируемому
датчик, 8.1, ..., 8п, причем с MTI- нима.гтьио возможным временем пуска. При подаче на вход БКВ 9.1, ..., 9(п-1) и НЭ 4п входного сигнала, пропорционального заданному максимальному значению установившейся скорости К, выходной сигнал НЭ An определяет темп нарастания сигнала на выходе интегратора 5п. Последний К 1п начинает разгоняться. В момент начала движения рабочего органа К 1п датчик 8п трогания включает БКВ 9(п-1) и на вход НЭ 4(п-1) подается сигнал, под действием которого начинается разгон К 1(п-1). Датчик 8(п-1) этого К 1(п-1) подает сигнал на пуск последующего К линии. 2 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления запуском конвейерной линии | 1974 |
|
SU570525A1 |
| Устройство для частотного пуска и синхронизации с сетью синхронной машины | 1983 |
|
SU1252890A1 |
| Устройство аврийного отключения при обрыве или стопорении цепи конвейера | 1979 |
|
SU875029A1 |
| Способ управления ленточным конвейером | 1988 |
|
SU1666413A1 |
| ЭЛЕКТРОТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2538907C1 |
| Устройство для управления загрузкой конвейера | 1987 |
|
SU1465386A1 |
| УСТРОЙСТВО ЗАЩИТЫ КОНВЕЙЕРА ПРИ ОБРЫВЕ ЛЕНТЫ | 2012 |
|
RU2483998C1 |
| Способ управления электроприводом | 1985 |
|
SU1359878A1 |
| Позиционная система регулирования | 1976 |
|
SU637790A1 |
| Система управления непрерывной разливкой жидкого металла | 1974 |
|
SU607643A1 |
Изобретение относится к автоматизации конвейерного транспорта в горнодобывающей промышленности. Цель - повышение производительности конвейерной линии за счет сокращения времени запуска. Устройство содержит измерители производительности 2.1 ... 2N и блоки управления 6.1 ... 6N электроприводами по числу конвейеров (К) 1.1 ... 1N в линии, соединенные с электродвигателями 71 ... 7N. Измерители 2.1 ... 2N выходами соединены с входами блока 3 задания ускорения, выход которого подключен к входам нелинейных элементов (НЭ) 4.1 ... 4N, через интеграторы 5.1 ... 5N соединенных с блоками 6.1 ... 6N управления. Для последовательного пуска К в направлении, противоположном грузопотоку, установленные на хвостовых барабанах всех К, кроме первого, датчики 8.2 ... 8N трогания соединены выходами с входами бесконтактных выключателей (БКВ) 9.1 ... 9(N-1). Запуск конвейерной линии производится устройством не в функции времени, а по моменту трогания, фиксируемому датчиками 8.1 ... 8N, причем с минимально возможным временем пуска. При подаче на вход БКВ 9.1 ... 9(N-1) и НЭ 4N входного сигнала, пропорционального заданному максимальному значению установившейся скорости К, выходной сигнал НЭ 4N определяет темп нарастания сигнала на выходе интегратора 5N. Последний К 1N начинает разгоняться. В момент начала движения рабочего органа К 1N датчик 8N трогания включает БКВ 9(N-1) и на вход НЭ 4(N-1) подается сигнал, под действием которого начинается разгон К 1(N-1). Датчик 8(N-1) этого К 1(N-1) подает сигнал на пуск последующего К линии. 2 ил.
Изобретение относится к автоматизации конвейерного транспорта и предназначено для управления пуском конвейерных линий в горнодобьшающей промьгашенности.
Целью изобретения является повышение производительности конвейерной линии за счет сокращения времени за- пуска.
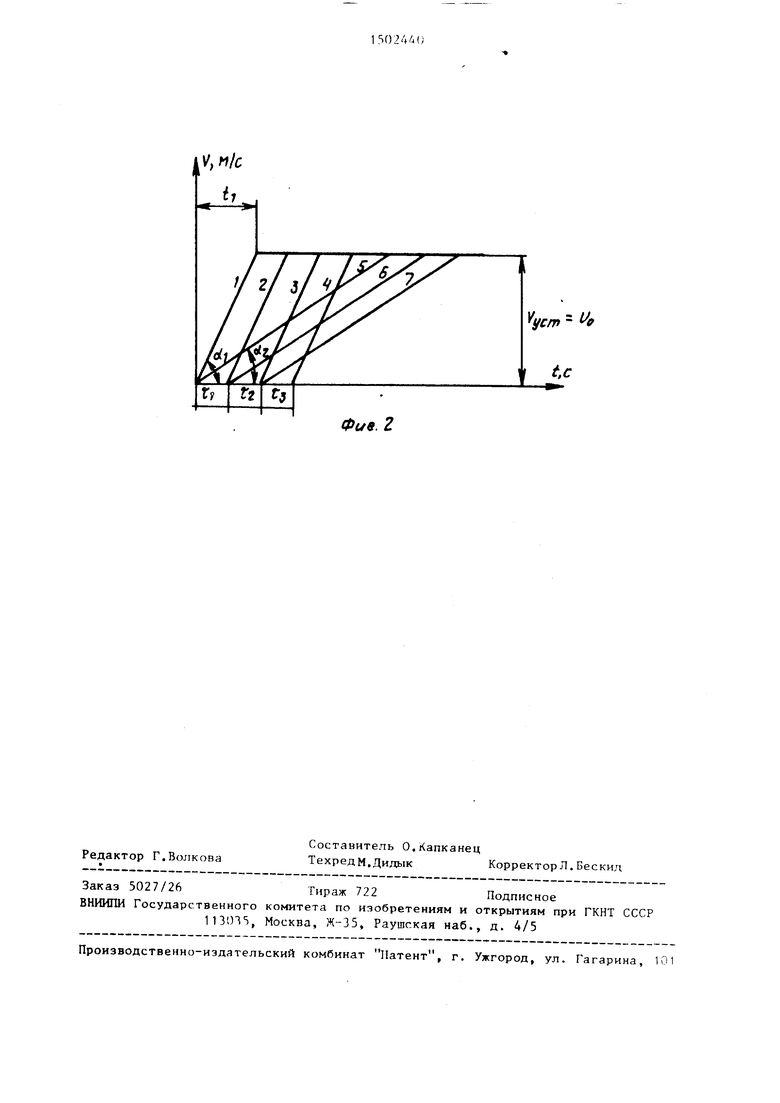
На фиг. 1 изображена схема устройства для управления пуском конвейерной линии; на фиг. 2 - диаграмма разгона конвейеров линии при двух раз- личных значениях ее загруженности.
На конвейерах 1.1, 1.2, ..., 1п конвейерной линии установлены измерители 2.1, 2.2, ..., 2п производительности, соединенные своими выходами с входами блока 3 задания ускорения, представляющего собой амплитудный детектор, выбирающий из п сигналов больший, подключенньш своим выходом к входам нелинейных элементов 4,1, 4.2, ..., 4п, каждый из которых соединен соответственно с интеграторами 5.1, 5.2, ..., 5п. Блоки 6.1, 6.2, ..., 6п управления электроприводами, каждый в отдельности, соедине)1ы с электродвигателями 7.1, 7.2, ..., 7п. Цля последовательного пуска конвейеров в направлении, противоположном грузопотоку, установленные на хвостовых барабанах всех конвейеров, кроме первого, датчики 8.2, 8.3, ... 8п трогания соединены своими выходам с входами бесконтактных выключателей 9.1 , 9.2, ..., 9(п-1).
Устройство работает следующим образом.
При подаче на вход бесконтактных выключателей 9.1, 9.2, ..., 9(п-1) и нелинейного элемента 4 входного сигнала U, пропорционального заданному максимальному значению установившейся скорости конвейера, определяемому по технологическим требованиям, на выходе нелинейного элемента 4п появляется сигнал, определяющий темп нарастания сигнала на выходе интегратора 5п, в резудьтате чег о начинается разгон последнего конвейера 1п (характеристика 1, фиг. 2). В момент начала движения рабочего органа конвейера In на хвостовом барабане датчик 8п трогания включает выключатель 9(п-1) и на вход нелинейного элемента 4(п-1) будет подан сигнал UQ, под действием которбг начнется разгон конвейера 1(п-1) (характеристика 2, фиг. 2). Датчик 8(п-1) трогания конвейера 1(п-1) подает сигнал на пуск последующего конвейера линии (хараткристика 3, фиг. 2) и т.д.
Запуск конвейерной :п1Нии производится не в функции времени, а по моменту трогания,причем с минимально возможным временем пуска. Время запуска зависит от загруженности, длины конвейера и т.д., однако в предлагаемом устройстве оно всегда ми- ьимально.
Полное время пуска конвейерной линии, состоящей из одинаковых кон 150244
вейеров, радио суммарному времени трогания всех конвейеров кроме первого, суммарному времени выбора зазоров t g, л всех конвейеров, а также полному времени пуска первого конвейера tp(
tA tTp(n-l) -t- + tp.,
Входной сигнал U о определяет установившуюся скорость конвейеров Vi/cT , а ускорение, с которым происходит пуск конвейеров линии (угол Crt , фиг. 2), определяется установ- кой нелинейного элемента, которая, в свою очередь, формируется по максимально загруженному конвейеру в блоке 3 задания ускорения, соединенным своими входами (по числу конпе- йеров) с выходами измерителей 2.2, 2.2, ..., 2п производительности.
Изменение ускорения при пуске ковейерной линии с изменением ее загруженности не приводит к изменению интервалов запуска последующего и предыдущего конвейеров линии (характеристика 5, 6, 7, фиг. 2).
Принимая во внимание то, что время распространения упругой деформа- ции, по сравнению со временем разгона конвейера, мало, применение такого устройства позволяет значительно сократить время пуска конвейерных линий и особенно линий значительной протяженности. Формула изобретени
Устройство для управления пуском конвейерной линии, включающее измер
o
5 0
5
о
5
О.,6
тели производительности и блоки управления электроприводами по числу конвейеров в линии, соединенные с электродвигателями, отличаю - DI; е е с я тем, что, с целью повышения производительности конвейерной линии за счет сокращения времени запуска, оно дополнительно снабжено блоком задания ускорения, датчиками трогания по числу конвейеров в линии, кроме первого, бесконтактньп ш выключателями по числу конвейеров в линии, кроме последнего, и блоками формирс вания сигнала управления по числу конвейеров в линии, вклю- чaющи пI последоватеаьно соединенные нелинейный элемент и интегратор, охваченные отрицательной обратной СВЯЗЬ,, при этом выходы интеграторов ог динены с блоками управления электроприводами, а выходы бескон- выключателей соединены с первым входами нелинейных элементов, выход датчика трогания последующего конвейера а линии соединен с управляющим входом бесконтактного выключателя предыдущего конвейера, к информационным входам бесконтактных выключателей и nepBONfy входу нелинейного элемента последнего конвейера подключен источник установленного напряжения, к вторым входам нелиней- librx элементов подключен выход блока 1адан11я ускорения, а выходы измерителей производительности подключены к соответствующим входам блока задания ускорения.
Фи9. Z
уст
| Способ включения конвейеров конвейерной линии | 1972 |
|
SU451591A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для управления запуском конвейерной линии | 1974 |
|
SU570525A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Грузопоток | |||
