Изобретение относится к автоматическому управлению поточно-транспортными системами и может быть использовано в промышленности строительных материалов, металлургии, горно -добывающей и химической промышленностях для управления загрузкой конвейерной линии сыпучим материалом.
Цель изобретения - повышение функциональной надежности устройства.
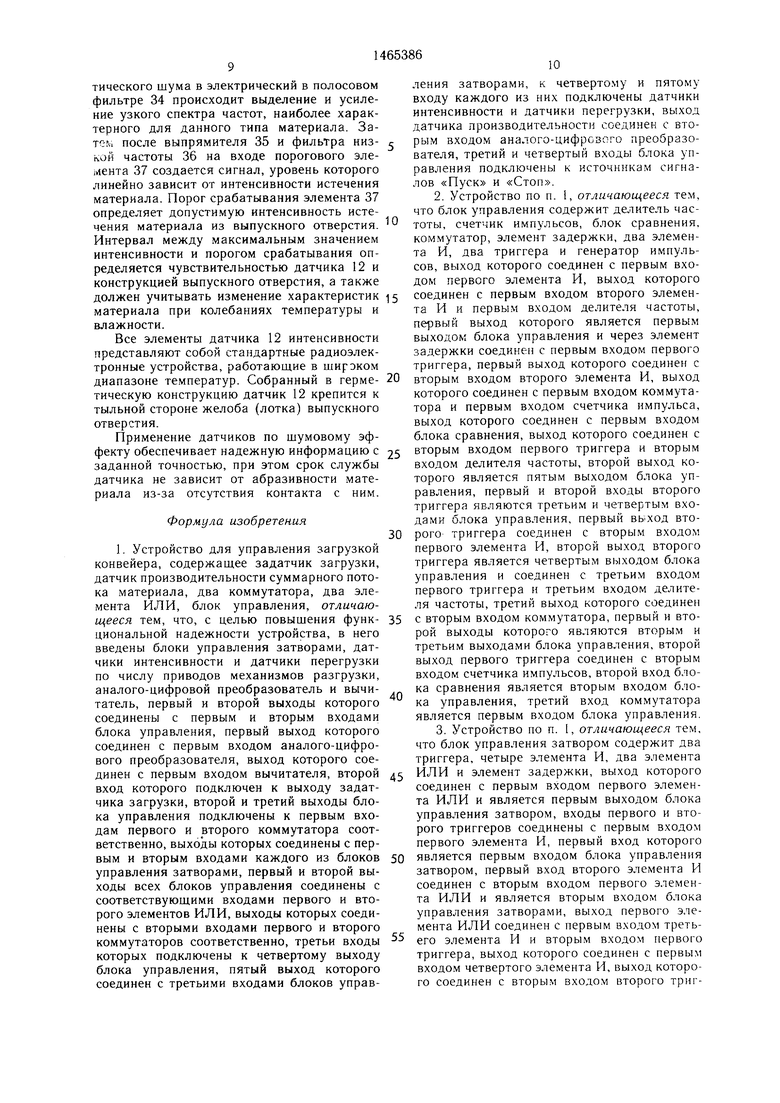
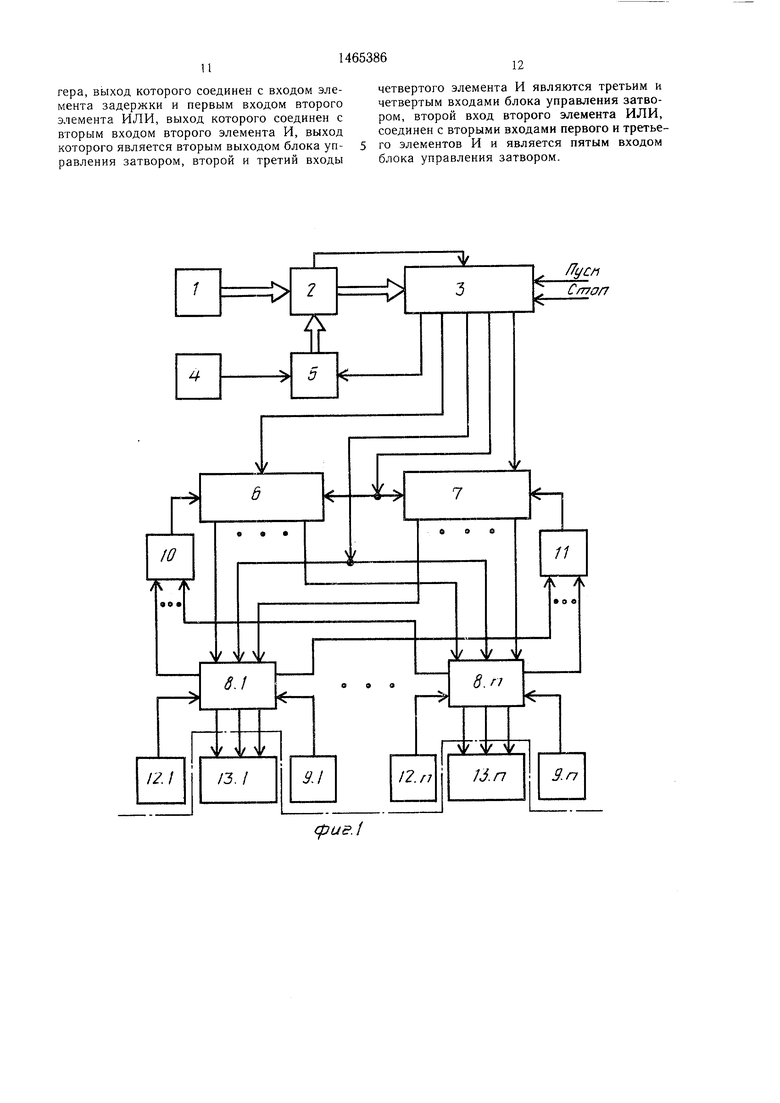
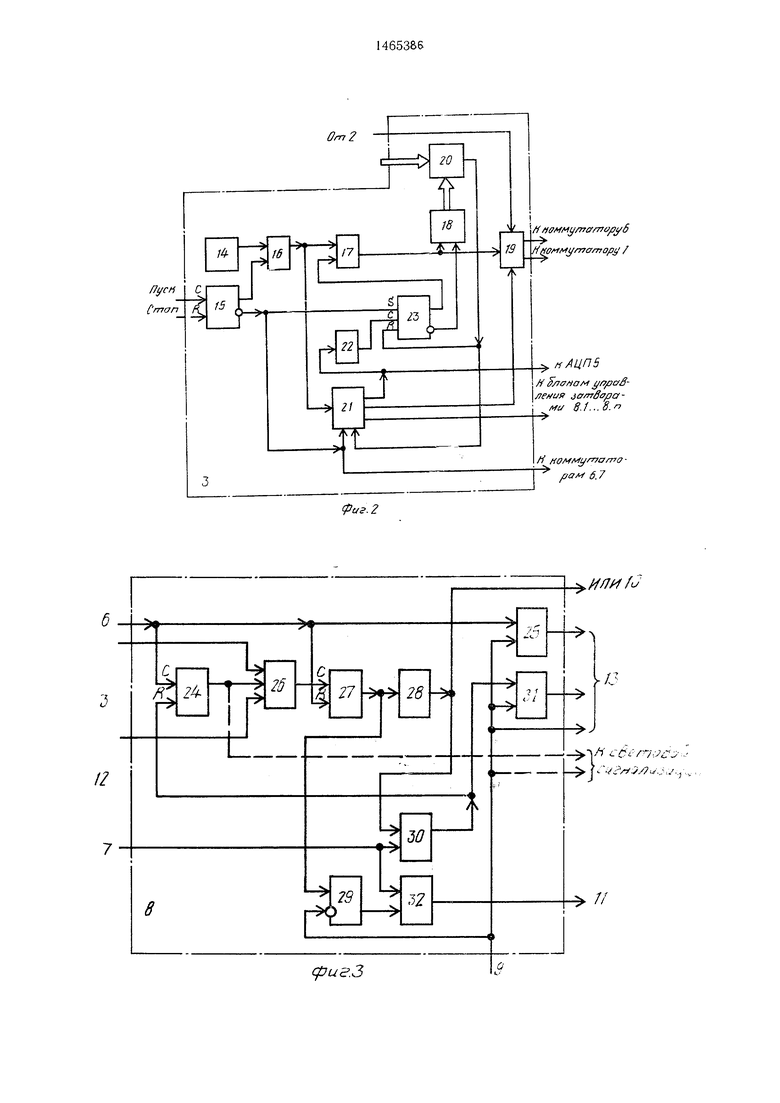
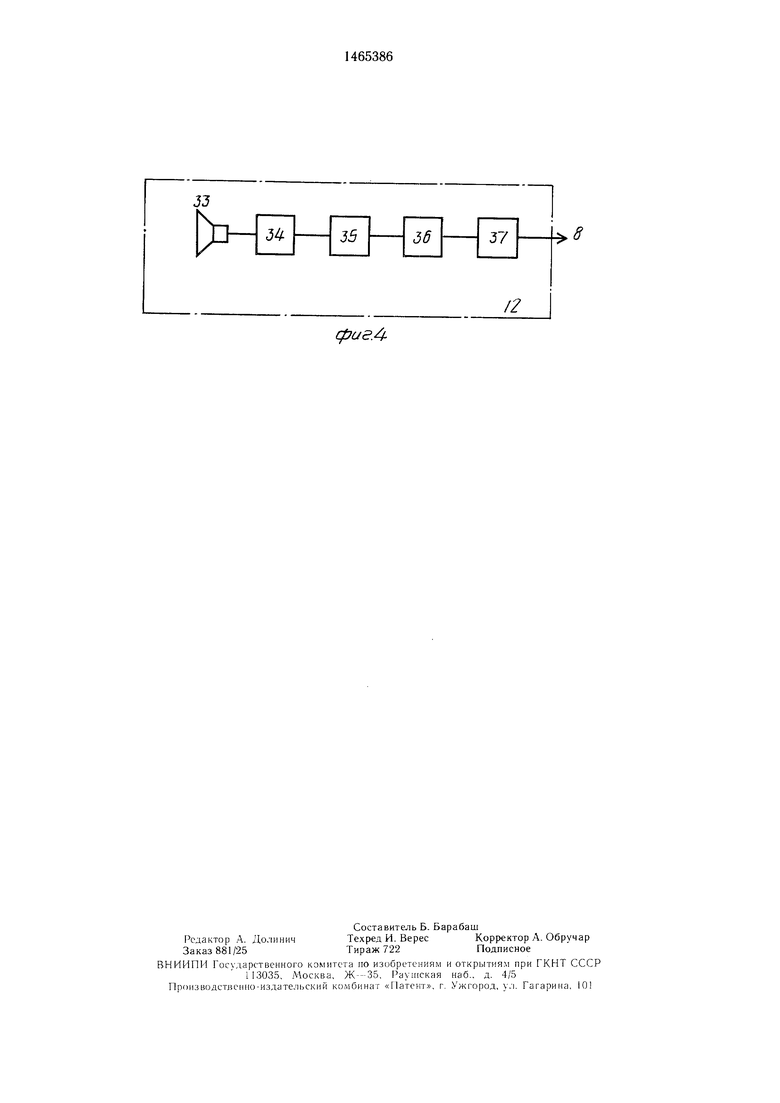
На фиг. 1 изображена структурная схема предлагаемого устройства; на фиг. 2 - функциональная схема блока управления; на фиг. 3 - функциональная схема блока управления затвором; на фиг. 4 - функциональная схема датчика интенсивности.
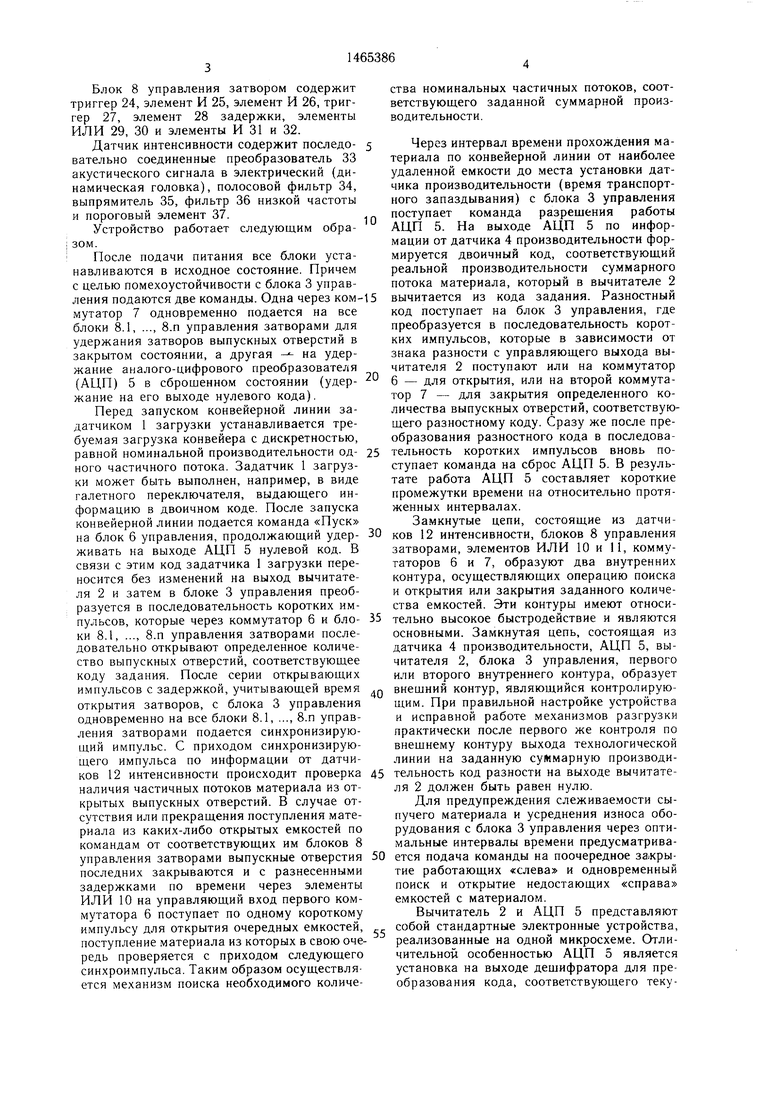
Устройство для управле}шя загрузкой конвейера содержит задатчик 1 загрузки, вычитатель 2, блок 3 управления, датчик 4 производительности, аналого-цифровой преобразователь 5, коммутаторы 6 и 7, блоки 8.1, ..., 8.П управления затворами, датчики перегрузки 9.1, ..., 9.п, многовходовые элементы ИЛИ 10 и 11, датчики 12.1, ..., 12.11 интенсивности. Поз. 13.1, .... 13.п обозначены приводы механизмов разгрузки.
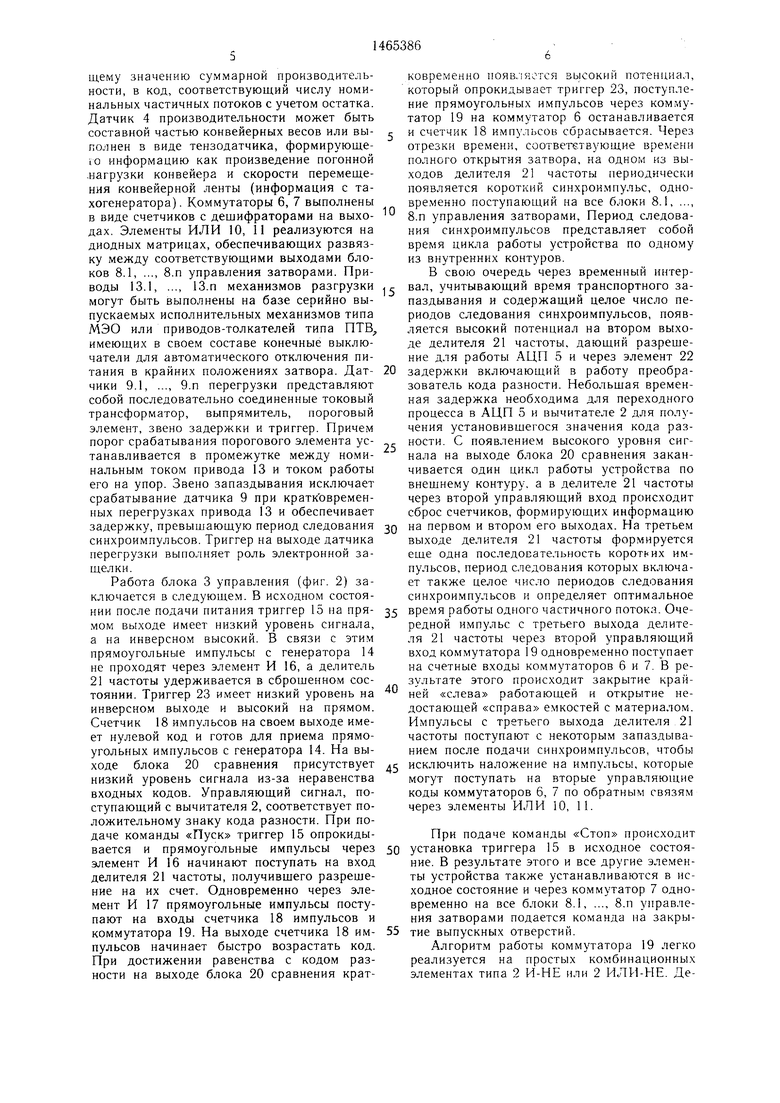
Блок управления содержит генератор 14 импульсов, триггер 15, элементы И 16 и 17. счетчик 18 импульсов, коммутатор 19, блок 20 сравнения, делитель 21 частоты, элемент 22 задержки и триггер 23.
о сд
00 00 С5
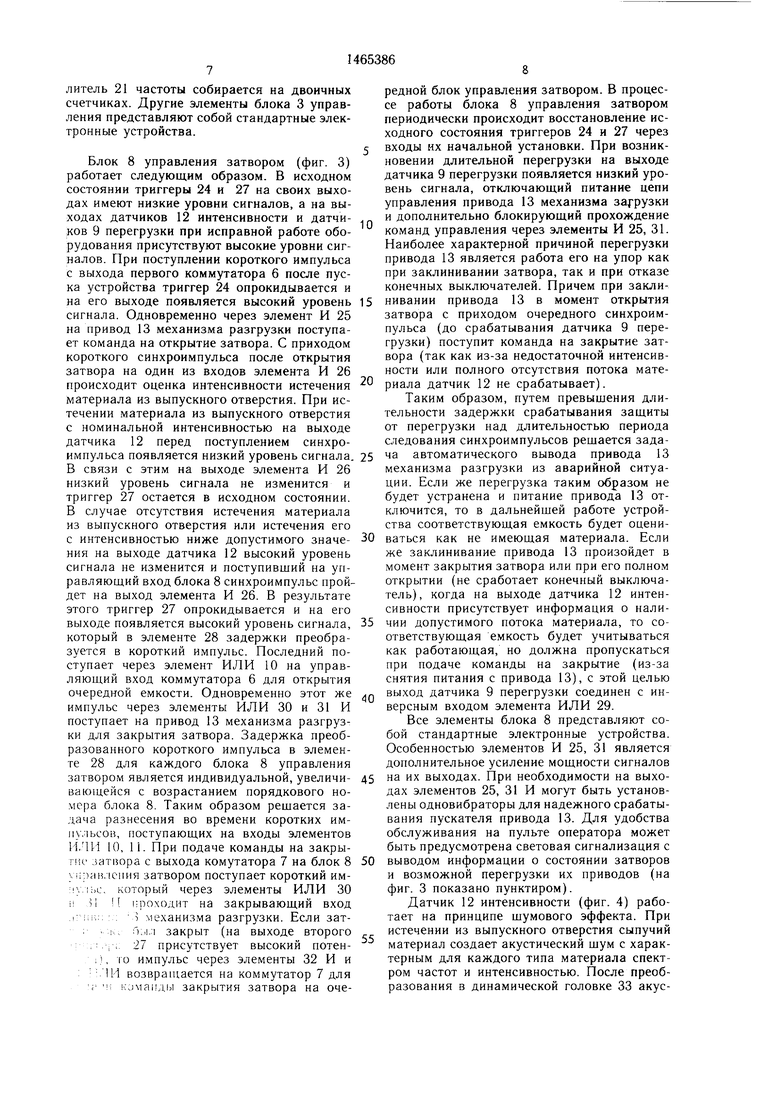
Блок 8 управления затвором содержит риггер 24, элемент И 25, элемент И 26, тригер 27, элемент 28 задержки, элементы ЛИ 29, 30 и элементы И 31 и 32.
Датчик интенсивности содержит последо- 5 ательно соединенные преобразователь 33 акустического сигнала в электрический (динамическая головка), полосовой фильтр 34, выпрямитель 35, фильтр 36 низкой частоты и пороговый элемент 37.
Устройство работает следующим обраОМ.
После подачи питания все блоки устанавливаются в исходное состояние. Причем с целью помехоустойчивости с блока 3 управления подаются две команды. Одна через ком-15 мутатор 7 одновременно подается на все блоки 8.1, ..., 8.П управления затворами для удержания затворов выпускных отверстий в закрытом состоянии, а другая - на удержание аналого-цифрового преобразователя (АЦП) 5 в сброшенном состоянии (удержание на его выходе нулевого кода).
Перед запуском конвейерной линии за- датчиком 1 загрузки устанавливается требуемая загрузка конвейера с дискретностью, равной номинальной производительности од- 25 ного частичного потока. Задатчик 1 загрузки может быть выполнен, например, в виде галетного переключателя, выдающего информацию в двоичном коде. После запуска конвейерной линии подается команда «Пуск на блок 6 управления, продолжающий удер- 30 живать на выходе АЦП 5 нулевой код. В связи с этим код задатчика 1 загрузки переносится без изменений на выход вычитате- ля 2 и затем в блоке 3 управления преобразуется в последовательность коротких импульсов, которые через коммутатор 6 и бло- 35 ки 8.1, ..., 8.П управления затворами последовательно открывают определенное количество выпускных отверстий, соответствующее коду задания. После серии открывающих импульсов с задержкой, учитывающей время Q открытия затворов, с блока 3 управления одновременно на все блоки 8.1, ..., 8.п управления затворами подается синхронизирующий импульс. С приходом синхронизирующего импульса по информации от датчиков 12 интенсивности происходит проверка 45 наличия частичных потоков материала из открытых выпускных отверстий. В случае отсутствия или прекращения поступления материала из каких-либо открытых емкостей по командам от соответствующих им блоков 8 управления затворами выпускные отверстия 50 последних закрываются и с разнесенными задержками по времени через элементы ИЛИ 10 на управляющий вход первого коммутатора 6 поступает по одному короткому импульсу для открытия очередных емкостей, поступление материала из которых в свою очередь проверяется с приходом следующего синхроимпульса. Таким образом осуществляется механизм поиска необходимого количества номинальных частичных потоков, соответствующего заданной суммарной производительности.
Через интервал времени прохождения материала по конвейерной линии от наиболее удаленной емкости до места установки датчика производительности (время транспортного запаздывания) с блока 3 управления поступает команда разрешения работы АЦП 5. На выходе АЦП 5 по информации от датчика 4 производительности формируется двоичный код, соответствующий реальной производительности суммарного потока материала, который в вычитателе 2 вычитается из кода задания. Разностный код поступает на блок 3 управления, где преобразуется в последовательность коротких импульсов, которые в зависимости от знака разности с управляющего выхода вы- читателя 2 поступают или на коммутатор 6 - для открытия, или на второй коммутатор 7 - для закрытия определенного количества выпускных отверстий, соответствующего разностному коду. Сразу же после преобразования разностного кода в последовательность коротких импульсов вновь поступает команда на сброс АЦП 5. В результате работа АЦП 5 составляет короткие промежутки времени на относительно протяженных интервалах.
Замкнутые цепи, состоящие из датчиков 12 интенсивности, блоков 8 управления затворами, элементов ИЛИ 10 и 11, коммутаторов 6 и 7, образуют два внутренних контура, осуществляющих операцию поиска и открытия или закрытия заданного количества емкостей. Эти контуры имеют относительно высокое быстродействие и являются основными. Замкнутая цепь, состоящая из датчика 4 производительности, АЦП 5, вы- читателя 2, блока 3 управления, первого или второго внутреннего контура, образует внещний контур, являющийся контролирующим. При правильной настройке устройства и исправной работе механизмов разгрузки практически после первого же контроля по внещнему контуру выхода технологической линии на заданную суммарную производительность код разности на выходе вычитате- ля 2 должен быть равен нулю.
Для предупреждения слеживаемости сыпучего материала и усреднения износа оборудования с блока 3 управления через оптимальные интервалы времени предусматривается подача команды на поочередное закрытие работающих «слева и одновременный поиск и открытие недостающих «справа емкостей с материалом.
Вычитатель 2 и АЦП 5 представляют собой стандартные электронные устройства, реализованные на одной микросхеме. Отличительной особенностью АЦП 5 является установка на выходе дещифратора для преобразования кода, соответствующего текущему значению суммарной производительности, в код, соответствующий числу номинальных частичных потоков с учетом остатка. Датчик 4 производительности может быть составной частью конвейерных весов или вы- полней в виде тензодатчика, формирующего информацию как произведение погонной .нагрузки конвейера и скорости перемещения конвейерной ленты (информация с та- хогенератора). Коммутаторы 6, 7 выполнены в виде счетчиков с дещифраторами на выхо- дах. Элементы ИЛИ 10, 11 реализуются на диодных матрицах, обеспечивающих развязку между соответствующими выходами блоков 8.1, ..., 8.П управления затворами. Приводы 13.1, ..., 13.п механизмов разгрузки могут быть выполнены на базе серийно выпускаемых исполнительных механизмов типа МЭО или приводов-толкателей типа ПТВ имеющих в своем составе конечные выключатели для автоматического отключения питания в крайних положениях затвора. Дат- чики 9.1, ..., 9.П перегрузки представляют собой последовательно соединенные токовый трансформатор, выпрямитель, пороговый элемент, звено задержки и триггер. Причем порог срабатывания порогового элемента ус- танавливается в промежутке между номинальным током привода 13 и током работы его на упор. Звено запаздывания исключает срабатывание датчика 9 при кратковременных перегрузках привода 13 и обеспечивает задержку, превышающую период следования синхроимпульсов. Триггер на выходе датчика перегрузки выполняет роль электронной защелки.
Работа блока 3 управления (фиг. 2) заключается в следующем. В исходном состоянии после подачи питания триггер 15 на пря- мом выходе имеет низкий уровень сигнала, а на инверсном высокий. В связи с этим прямоугольные импульсы с генератора 14 не проходят через элемент И 16, а делитель 21 частоты удерживается в сброщенном состоянии. Триггер 23 имеет низкий уровень на инверсном выходе и высокий на прямом. Счетчик 18 импульсов на своем выходе имеет нулевой код и готов для приема прямоугольных импульсов с генератора 14. На выходе блока 20 сравнения присутствует низкий уровень сигнала из-за неравенства входных кодов. Управляющий сигнал, поступающий с вычитателя 2, соответствует положительному знаку кода разности. При подаче команды «Пуск триггер 15 опрокидывается и прямоугольные импульсы через элемент И 16 начинают поступать на вход делителя 21 частоты, получившего разреще- ние на их счет. Одновременно через элемент И 17 прямоугольные импульсы поступают на входы счетчика 18 импульсов и коммутатора 19. На выходе счетчика 18 им- пульсов начинает быстро возрастать код. При достижении равенства с кодом разности на выходе блока 20 сравнения крат
0
5 0 5
0
ковременно иояв.чкется зысокий потенциал, который опрокидывает триггер 23, поступление прямоугольных импульсов через коммутатор 19 на коммутатор 6 останавливается и счетчик 18 импульсов сбрасывается. Через отрезки времени, соотвеге,твующие времени полного открытия затвора, на одном из выходов делителя 21 частоты тернодически появляется короткий синхроимпульс, одновременно поступающий на все блоки 8.1, ..., 8.П управления затворами. Период следования синхроимпульсов представляет собой время цикла работы устройства по одному из внутренних контуров.
В свою очередь через временный интервал, учитывающий время транспортного запаздывания и содержащий целое число периодов следования синхроимпульсов, появляется высокий потенциал на втором выходе делителя 21 частоты, дающий разреще- ние для работы АЦП 5 и через элемент 22 задержки включающий в работу преобразователь кода разности. Небольшая временная задержка необходима для переходного процесса в АЦП 5 и вычитателе 2 для получения установившегося значения кода разности. С появлением высокого уровня сигнала на выходе блока 20 сравнения заканчивается один цикл работы устройства по внешнему контуру, а в делителе 21 частоты через второй управляющий вход происходит сброс счетчиков, формирующих информацию на первом и второ.м его выходах. На третьем выходе делителя 21 частоты формируется еще одна последовательность коротких импульсов, период следования которых включает также целое число периодов следования синхроимпульсов и определяет оптимальное время работы одного частичного потока. Очередной импульс с третьего выхода делителя 21 частоты через второй управляющий вход коммутатора 19 одновременно поступает на счетные входы коммутаторов 6 и 7. В результате этого происходит закрытие крайней «слева работающей и открытие недостающей «справа емкостей с материалом. Импульсы с третьего выхода делителя 21 частоты поступают с некоторым запаздыванием после подачи синхроимпульсов, чтобы исключить наложение на импульсы, которые могут поступать на вторые управляющие коды коммутаторов 6, 7 по обратным связям через элементы ИЛИ 10, П.
При подаче команды «Стоп происходит установка триггера 15 в исходное состояние. В результате этого и все другие элементы устройства также устанавливаются в исходное состояние и через коммутатор 7 одновременно на все блоки 8.1, ..., 8.п управления затворами подается команда на закрытие выпускных отверстий.
Алгорит.м работы коммутатора 19 легко реализуется на простых комбинационны.к элементах типа 2 И-НЕ или 2 ИЛИ-НЕ. Де
литель 21 частоты собирается на двоичных счетчиках. Другие элементы блока 3 управления представляют собой стандартные электронные устройства.
Блок 8 управления затвором (фиг. 3) работает следующим образом. В исходном состоянии триггеры 24 и 27 на своих выходах имеют низкие уровни сигналов, а на выходах датчиков 12 интенсивности и датчиков 9 перегрузки при исправной работе оборудования присутствуют высокие уровни сигналов. При поступлении короткого импульса с выхода первого коммутатора 6 после пуска устройства триггер 24 опрокидывается и на его выходе появляется высокий уровень сигнала. Одновременно через элемент И 25 на привод 13 механизма разгрузки поступает команда на открытие затвора. С приходом короткого синхроимпульса после открытия затвора на один из входов элемента И 26 происходит оценка интенсивности истечения материала из выпускного отверстия. При истечении материала из выпускного отверстия с номинальной интенсивностью на выходе датчика 12 перед поступлением синхроимпульса появляется низкий уровень сигнала. В связи с этим на выходе элемента И 26 низкий уровень сигнала не изменится и триггер 27 остается в исходном состоянии. В случае отсутствия истечения материала из выпускного отверстия или истечения его с интенсивностью ниже допустимого значения на выходе датчика 12 высокий уровень сигнала не изменится и поступивший на управляющий вход блока 8 синхроимпульс пройдет на выход элемента И 26. В результате этого триггер 27 опрокидывается и на его выходе появляется высокий уровень сигнала, который в элементе 28 задержки преобразуется в короткий импульс. Последний поступает через элемент ИЛИ 10 на управляющий вход коммутатора 6 для открытия очередной емкости. Одновременно этот же импульс через элементы ИЛИ 30 и 31 И поступает на привод 13 механизма разгрузки для закрытия затвора. Задержка преобразованного короткого импульса в элементе 28 для каждого блока 8 управления затвором является индивидуальной, увеличивающейся с возрастанием порядкового номера блока 8. Таким образом решается задача разнесения во времени коротких импульсов, поступающих на входы элементов 11,ПИ 10, П. При подаче команды на закры- ти.е затвора с выхода комутатора 7 на блок 8 у;1р;1н,1С11ия затвором поступает короткий им- ,i;,c, который через элементы ИЛИ 30 ii 5 i П на закрывающий вход .i: i:i : : : 5 механизма разгрузки. Если зат- : , );,,: закрыт (на выходе второго
, i .- 27 присутствует высокий потен- ;, то импульс через элементы 32 И и
МИ возвращается на коммутатор 7 для
i камаиды закрытия затвора на оче
0
0
5
0
5
0
5
0
5
редной блок управления затвором. В процессе работы блока 8 управления затвором периодически происходит восстановление исходного состояния триггеров 24 и 27 через входы их начальной установки. При возникновении длительной перегрузки на выходе датчика 9 перегрузки появляется низкий уровень сигнала, отключающий питание цепи управления привода 13 механизма загрузки и дополнительно блокирующий прохождение команд управления через элементы И 25, 31. Наиболее характерной причиной перегрузки привода 13 является работа его на упор как при заклинивании затвора, так и при отказе конечных выключателей. Причем при заклинивании привода 13 в момент открытия затвора с приходом очередного синхроимпульса (до срабатывания датчика 9 перегрузки) поступит команда на закрытие затвора (так как из-за недостаточной интенсивности или полного отсутствия потока материала датчик 12 не срабатывает).
Таким образом, путем превышения длительности задержки срабатывания защиты от перегрузки над длительностью периода следования синхроимпульсов решается задача автоматического вывода привода 13 механизма разгрузки из аварийной ситуации. Если же перегрузка таким образом не будет устранена и питание привода 13 отключится, то в дальнейщей работе устройства соответствующая емкость будет оцениваться как не имеющая материала. Если же заклинивание привода 13 произойдет в момент закрытия затвора или при его полном открытии (не сработает конечный выключатель), когда на выходе датчика 12 интенсивности присутствует информация о наличии допустимого потока материала, то соответствующая емкость будет учитываться как работающая, но должна пропускаться при подаче команды на закрытие (из-за снятия питания с привода 13), с этой целью выход датчика 9 перегрузки соединен с инверсным входом элемента ИЛИ 29.
Все элементы блока 8 представляют собой стандартные электронные устройства. Особенностью элементов И 25, 31 является дополнительное усиление мощности сигналов на их выходах. При необходимости на выходах элементов 25, 31 И могут быть установлены одновибраторы для надежного срабатывания пускателя привода 13. Для удобства обслуживания на пульте оператора может быть предусмотрена световая сигнализация с выводом информации о состоянии затворов и возможной перегрузки их приводов (на фиг. 3 показано пунктиром).
Датчик 12 интенсивности (фиг. 4) работает на принципе шумового эффекта. При истечении из выпускного отверстия сыпучий материал создает акустический шум с характерным для каждого типа материала спектром частот и интенсивностью. После преобразования в динамической головке 33 акустического шума в электрический в полосовом фильтре 34 происходит выделение и усиление узкого спектра частот, наиболее характерного для данного типа материала. За- тег« после выпрямителя 35 и фильтра низ- кой частоты 36 на входе порогового элемента 37 создается сигнал, уровень которого линейно зависит от интенсивности истечения материала. Порог срабатывания элемента 37 определяет допустимую интенсивность истечения материала из выпускного отверстия. Интервал между максимальным значением интенсивности и порогом срабатывания определяется чувствительностью датчика 12 и конструкцией выпускного отверстия, а также должен учитывать изменение характеристик материала при колебаниях температуры и влажности.
Все элементы датчика 12 интенсивности представляют собой стандартные радиоэлектронные устройства, работающие в широком диапазоне температур. Собранный в герме- тическую конструкцию датчик 12 крепится к тыльной стороне желоба (лотка) выпускного отверстия.
Применение датчиков по шумовому эффекту обеспечивает надежную информацию с заданной точностью, при этом срок службы датчика не зависит от абразивности материала из-за отсутствия контакта с ним.
Формула изобретения
1. Устройство для управления загрузкой конвейера, содержащее задатчик загрузки, датчик производительности суммарного потока материала, два коммутатора, два элемента ИЛИ, блок управления, отличающееся тем, что, с целью повышения функ- циональной надежности устройства, в него введены блоки управления затворами, датчики интенсивности и датчики перегрузки по числу приводов механизмов разгрузки, аналого-цифровой преобразователь и вычи- татель, первый и второй выходы которого соединены с первым и вторым входами блока управления, первый выход которого соединен с первым входом аналого-цифрового преобразователя, выход которого соединен с первым входом вычитателя, второй вход которого подключен к выходу задат- чика загрузки, второй и третий выходы блока управления подключены к первым входам первого и второго коммутатора соответственно, выходы которых соединены с первым и вторым входами каждого из блоков управления затворами, первый и второй выходы всех блоков управления соединены с соответствующими входами первого и второго элементов ИЛИ, выходы которых соединены с вторыми входами первого и второго коммутаторов соответственно, третьи входы которых подключены к четвертому выходу блока управления, пятый выход которого соединен с третьими входами блоков управ5
0
5
0
0
5 5 0
ления затворами, к четвертому и пятому входу каждого из них подключены датчики интенсивности и датчики перегрузки, выход датчика производительности соединен с вторым входом аналого-цифрозого преобразователя, третий и четвертый входы блока управления подключены к источникам сигналов «Пуск и «Стоп.
2.Устройство по п. 1, отличающееся тем, что блок управления содержит делитель частоты, счетчик импульсов, блок сравнения, коммутатор, элемент задержки, два элемента И, два триггера и генератор импульсов, выход которого соединен с первым входом первого элемента И, выход которого соединен с первым входом второго элемента И и первым входом делителя частоты, первый выход которого является первым выходом блока управления и через элемент задержки соединен с первым входом первого триггера, первый выход которого соединен с вторым входом второго элемента И, выход которого соединен с первым входом коммутатора и первым входом счетчика импульса, выход которого соединен с первым входом блока сравнения, выход которого соединен с вторым входом первого триггера и вторым входом делителя частоты, второй выход которого является пятым выходом блока управления, первый и второй входы второго триггера являются третьим и четвертым входами блока управления, первый второго триггера соединен с вторым входом первого элемента И, второй выход второго триггера является четвертым выходом блока управления и соединен с третьим входом первого триггера и третьим входом делителя частоты, третий выход которого соединен с вторым входом коммутатора, первый и второй выходы которого являются вторым и третьим выходами блока управления, второй выход первого триггера соединен с вторым входом счетчика импульсов, второй вход блока сравнения является вторым входом блока управления, третий вход коммутатора является первым входом блока управления.
3.Устройство по п. 1, отличающееся тем, что блок управления затвором содержит два триггера, четыре элемента И, два элемента ИЛИ и элемент задержки, выход которого соединен с первым входом первого элемента ИЛИ и является первым выходом блока управления затвором, входы первого и второго триггеров соединены с первым входом первого элемента И, первый вход которого является первым входом блока управления затвором, первый вход второго элемента И соединен с вторым входом первого элемента ИЛИ и является вторым входом блока управления затворами, выход первого элемента ИЛИ соединен с первым входом третьего элемента И и вторым входом первого триггера, выход которого соединен с первым входом четвертого элемента И, выход которого соединен с вторым входом второго триггера, выход которого соединен с входом элемента задержки и первым входом второго элемента ИЛИ, выход которого соединен с вторым входом второго элемента И, выход которого является вторым выходом блока управления затвором, второй и третий входы
четвертого элемента И являются третьим и четвертым входами блока управления затвором, второй вход второго элемента ИЛИ, соединен с вторыми входами первого и третьего элементов И и является пятым входом блока управления затвором.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для коррекции изображений объектов | 1988 |
|
SU1566386A1 |
| Цифровой фильтр | 1989 |
|
SU1764141A1 |
| Устройство для распознавания контуров изображений | 1983 |
|
SU1156103A1 |
| Анализатор изображений | 1989 |
|
SU1755268A1 |
| СПОСОБ КОМПЬЮТЕРНОЙ РЕГИСТРАЦИИ СИГНАЛА ИЗОБРАЖЕНИЯ ИНТЕРФЕРОГРАММ | 2012 |
|
RU2507706C2 |
| Устройство для сварки давлением | 1987 |
|
SU1459864A1 |
| Устройство для сжатия информации | 1986 |
|
SU1365107A1 |
| Система управления бесконусным засыпным аппаратом доменной печи | 1984 |
|
SU1217884A1 |
| ЦИФРОВОЙ РАДИОПЕЛЕНГАТОР | 1999 |
|
RU2149419C1 |
| Спектральный анализатор случайных сигналов | 1984 |
|
SU1269048A1 |
Изобретение относится к поточно- транспортным системам и позволяет автоматически управлять загрузкой конвейера. Цель изобретения - повышение функциональной надежности устройства. Для этого устройство содержит задатчик 1 загрузки, вычитатель 2, блок управления (БУ) 3, датчики производительности 4, перегрузки 9.1, ..., 9.П и интенсивности 12.1. ..., 12.п, АЦН 5, коммутаторы 6 и 7, БУ 8.1, ..., 8.п затворами выпускных отверстий, многовходовые элементы ИЛИ 10, 11 и приводы 13.1 13.11 .механизмов разгрузки. Задатчиком 1 загрузки устанавливается требуемая загрузка конвейера. После подачи ко.манды «Пуск БУ 3 удерживает на выходе АЦП 5 нулевой код. Выходной код вычитателя 2 поступает на коммутатор 6 и БУ 8.1, ..., 8.п. Замкнутые цепи, состоящие из датчиков 12.1, ..., 12.п БУ 8.1, ...,.8.п, элементов ИЛИ 10, 1 и ком- мутзтороз 6 и 7, образуют два внутренних контура, осуществляющих операцию поиска, открытия или закрытия заданного количества выпускных отверстий емкостей. Контроль за работой устройства осуц-.ествля- ется внешним контуро.м, образованным датчиком 4, АЦП 5, вычитателем 2 и БУ 3. При этЬм БУ 8.1, ..., 8.П связаны с приводами 13.1, ..., 13.п механизмом разгрузки, контроль за работой которых производят датчики 9.1, ..., 9.п. Датчик 12 интенсивности работает на принципе шумового эффекта. 2 3. п. ф-лы, 4 ил. & (Л
(pue.i
Сп7а/7
фиеА
| Устройство для управления загрузкой конвейера" | 1976 |
|
SU715403A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для управления загрузкой конвейера | 1984 |
|
SU1221105A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
