1
Изобретение относится к системам автоматизации конвейерного транспорта.
Известны устройства для управления запуском электроприводов конвейерной линии, основанные использовании узлов контроля скорости движения тяговых орга-нов отдельных конвейеров не только в установившемся режиме, но и при пуске, обеспечивающие одновременное окончание пуска конвейеров отдельных участков 1.
Известны устройства для управления запуском конвейерных линий, содержащие измеритель производительности начального конвейера линии, блоки контроля скорости движения тяговых органов и блоки управления электроприводами по числу отдельных конвейеров линии 2.
Однако такие устройства характеризуются значительными потерями времени при запусках, приводящими к существенному снижепию эксплуатационной производительности трансиортного оборудования и повыщенному расходу электроэнергии.
С целью сокращения времени запуска предлагаемое устройство снабжено блоками выбора программ запуска, сумматорами и секционированным по числу конвейеров последовательным регистром, сдвиговые входы секций которого подключены к блокам контроля скорости соответствующих конвейеров, а выходы ячеек каждой секции последовательного регистра через сумматор и блок выбора программ запуска соединены с блоками управления электроприводами соответствующих конвейеров ли.пии, причем выход сумматора каждой предыдущей секзции регистра соединен с входом блока выбора программ запуска каждого следуюп;его в нанравлении грузопотока конвейера.
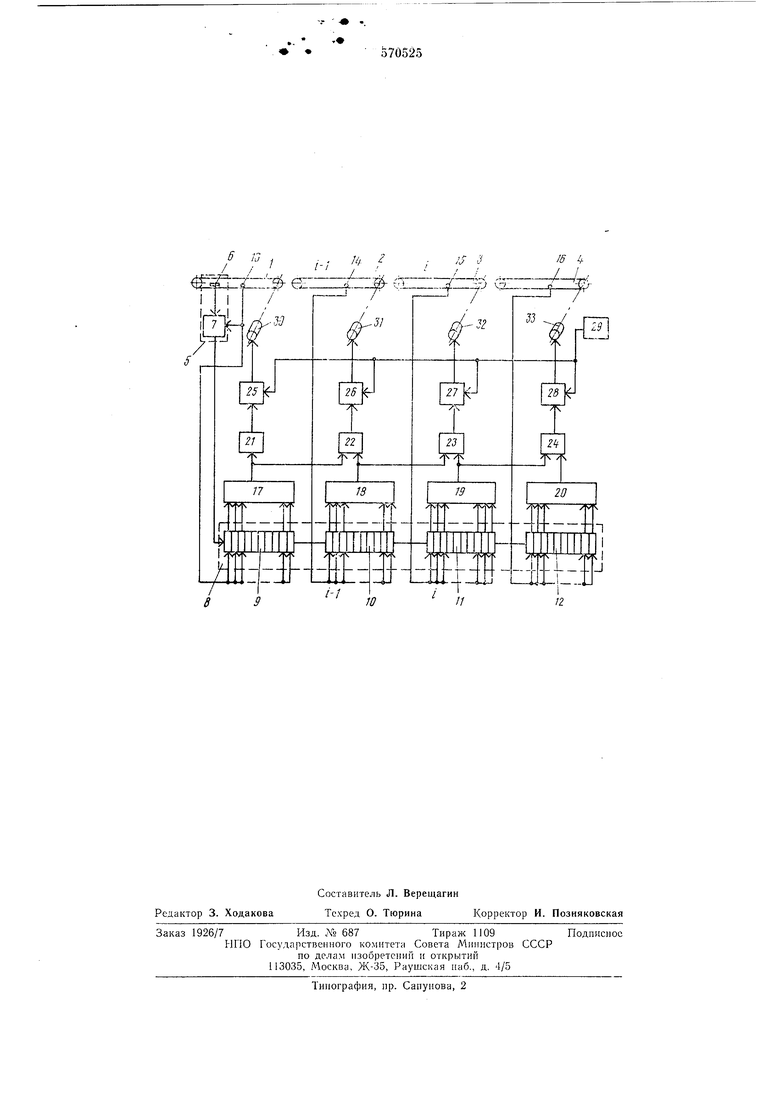
На чертеже изображена схема предлагаемого устройства.
На начальном конвейере 1 конвейерной линии, включающей также конвейеры 2, 3, 4, установлен частотный измеритель 5 дроизводительности, состоящий из датчика 6 погонной нагрузки., подключенного к блоку 7 умножения с частотным выходом, который соединен с основным входом секционироваипого по числу коНВейерОВ последовательного регистра 8. Сдвиговые вхощы секций 9, 10, И и 12 последовательного регистра подключены к блокам 13, 14, 15 и 16 контроля скорости рабочих органов конвейеров, а выходы ячеек каждой секции последовательного регистра
через сумматоры 17, 18, 19, 20 состояния ячеек соединены соответственно с блоками 21, 22, 23 и 24 гвыбора программ запуска.
Блоки 21, 22, 23 н 24 выбора программ запуска, каждый в отдельности, соедииены с
блоками 25, 26, 27 и 28 унравления электроприво/аами конвейеров, к которым подключен блок 29 управления запуском конвейерной линии н соответствуюш,ие электродвигатели 30, 31, 32 и 33. Для упреждения управляющего воздеЙ1етвия выходы сумматоров 17, 18 и 19 соединены е блоками 22, 23 и 24 выбора программ соответственно. При этом учитывается распределение транспортируемого материала по дли1не загружающего конвейера, для чего сумматоры выполнены нелинейными е возрастанием «весовой функции суммирования в направлении траиспорти.рования материала за счет масштаба суммировання в зависимости от номера входа сумматора. Устройство работает следующим образом. При работе конвейерной линии по сигналам датчика 6 когонной нагрузки и блока 13 контроля скорости начального конвейера 1 в блоке 7 умножения ,с частотным выходом onределяется в виде частотно-модулированного импульсного сигнала текущее значение производительности- начального конвейера в момент времени, соответствующий прохождению горной массы через зону установки датчика 6 погонной нагрузки. При поступлении в секционированный последовательный регистр 8 каждый импульс указанной импульсной последовательности, частота которой отражает текущую ироизводительно|сть, записывается в первой ячейке первой секции 9 регистра 8 и последовательно переносится в последующие ячейки иервой секции регистра со скоростью, пропорциональной частоте продвигающих импульсов, поступающих от блока 13 контроля скорости начального конвейера. С выхода первой секции регистра импульсы импульсной последовательности поступают на вход секций 10 регистра 8, перенос которых в последующие ячейки секции осуществляется цродвигающими импульсами, поступающими от блока 14 контроля скорости последующего конвейера 2. Продвижение импульсной последовательности по остальным секциям И, 12 регистра 8 осуществляется аналогично. Таким образоМ, скорость продвижения и число находящихся в данный момент времени импульсов в отдельных секциях регистра цропорциональны екороетн, с которой перемещается часть транспортнога потока, и весовОМу количеству массы материала на ленте соответствующего конвейера, т. е. в регистре моделируется распределение по длине и процесс движения вдоль конвейеров потока транспортируемого материала. При остановке .конвейеров линии в момент, когда скорость движения тягового органа конвейера стаиов1-ртся равной нулю, перенос импульсов от ячейки к ячейке соответствующей секции регистра прекращается, а состояние ячеек характеризует весовое распределение материала по длине остановленного конвейера.
570525 Сигналы состояния ячеек отдельных секций регнстра 8 поступают на входы соответствующих сумматоров 17, 18, 19, 20, на выходе которых по-лучают аналоговые сигналы, поступающие в блоки 21, 22, 23 и 24 выбора программ заиуска конвейеров. В зависимости от величины сигналов на выходе сумматоров 17, Ii8, 19 и 20 к блоков 21, 22, 23 и 24 выбора программ запуска в блоки 25, 26, 27 и 28 управления элект,роириводами поступают задания на установку соответствующих диаграмм разгона отдельных конвейеров. При иовториом запуске линии оператор воздействует на бло-к 29 управления запуском, сигналы с которого поступают в блоки 25, 26, 27 и 28 управления электроприводами и обеспечивают в соответствии с заложенной в блоке 29 очередностью включение электродвигателей 30, 31, 32 и 33, разгон которых производится в фу}1кции их интегральной загруженности, т. е. общее время зацуска линии и отдельиых конвейеров при каждом запуске автоматически устанавливается минимально допустимым, в результате чего суммарные потери времени на запуски конвейерной линии сокращаются. Более полную адаптацию алгОритма запуска конвейерной линии иолучают, когда сигнал о загрузке конвейера, снимаемый с его сумматора, вводят ш узел выбора программ запуска следующего в направлении грузопотока конвейера, т. е. в зависимости от величины сигнала, например, на выходе сумматора 18 (г-1)-й секции регистра из блока 23 выбора программ запуска в блок 27 управления электроприводом поступает сигнал, запрещающий или разрещающий включение электродвигателя 32 i-ro конвейера по сигналу блока 29 управления запуском конвейера. 1ак, напри-мер, когда конвейеры остановленной конвейерной линии загружены полпостыо, по сигналам сумматоров 17, 18, 19 через блоки 21, 22, 23 выбора программ запуска прохождение сигналов от блока управления запуском в блоки 25, 26, 27 управления электроприводами блокируется, а в блок 28 управления электроприводом последнего конвейера 4 разрещается. Поэтому при запуске сигнал блока 29 управления запуском обеспечивает включение лектродвигателя 33 последнего конвейера 4 линии с последующим поочередным включеием остальных конвейеров в направле нии, ротивоположном грузопотоку. В случае, когда все конвейеры линии разружены, сигналы блока 29 управления зауском проходят в блок 25 управления элекроприводом начального конвейера 1, двигаель которого при: пуске включается первым. Прохождение сигналов от блоКа 29 в блои 26, 27, 28 управления электроиривода.ми стальных конвейеров блокируется выходныи сигналами сумматоров 17, 18, 19 через локи 22, 23, 24 выбора программ запуска.
После включения загружающей конвейерную линию установки (на чертеже не показана) начальным конвеие1ром i формируется транспортный поток, который моделируется в начальной секции 9 регистра 8.
При достижении заданного уровия сигнала на выходе сумматора 17 из блока 22 выбора программ поступает в блок 26 управления электроприводами сигнал, разрешающий прохождение сигнала от блока 29 в блок 26, в результате чего включается электродвигатель 31 следующего конвейера 2. Включение конвейеров 3 и 4 осуществляется аналогично.
Если- в остановленной конвейерной линии загружены не все конвейеры, то прохождение сигналов от блока 29 управления запуском разрещается, в соответствии с описанным, в блоки упр авления электроприводами первого и последнего в направ 1ении грузопотока ко«вейеров соответственно незагруженного и загруженного участков.
Дальнейшее включение конвейеров на незагруженных участках происходит в направле11и:ц грузопотока, а на загруженных - против.
Поскольку сумматор 18 (i-1)-й ячейки регистра выполнен нелинейным с возрастанием «весовой функпии суммирования, то он обеспечивает включение с упреждением i-ro конвейера после включения незагруженного (i-1)-го конвейера, что .позволяет избежать просыпей в месте перегрузки независимо от общего весового количес-лва массы транспортируемого лентой (i-1)-го конвейера материала.
Таки.м образом, предложенное устройство для управления запуском обеспечивает автоматическую адаптацию алгоритма пуска в
завпспмости от загруженности ли.нии, а также от распределения материала по длине каждого конвейера, благодаря чему ооеспечивается существенное сокращение времени запуска конвейерной линии, уменьщаются непроизводительные затраты энергии и исключаются датчики контроля материала на последующи х донвейерах.
Формула изобретения
Устройство для управления запуском конвейерной линиИ, содержащее измеритель производительности начального конвейера линии, блоки ко|нтро1ля скорости движения
тяговых органов и блоки управления электропрпвода.ми по числу отдельных конвейеров линии, отличающееся тем, что, с целью сокращения времени запуска, оно снабжено блоками выбора программ запуски,
сумматорами и секционированным по числу конвейеров последовательным регистром, сдвиговые входы секций которого подключены к блокам контроля скорости соответствующих конвейеров, а выходы ячеек
каждой секции последовательного регистра через сумматор и блок выбора программ запуска соединены с блоками управления электроприводами, соответствующих конвейеров линии, причем выход сумматора каждой предыдущей секции регистра соединен с входом блока выбора программ запуска каждого следующего в направлении грузопотока коивейера.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство № 264965, кл. В 65G 43/10, 1968.
2.Авторское свидетельство № 189072, кл. В 65G 23/00, 1964.
/4 г
IB
(.5 Са
- ,..,

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления конвейерной системой | 1979 |
|
SU878686A1 |
| Способ управления роторным комплексом и устройство для его осуществления | 1987 |
|
SU1537776A1 |
| Устройство для управления системой конвейеров | 1976 |
|
SU591370A1 |
| Система автоматизированного управления роторным экскаватором | 1985 |
|
SU1266942A2 |
| Устройство для автоматизированного контроля силового режима металлоконструкций машин роторных комплексов | 1984 |
|
SU1209772A1 |
| Способ автоматического выбора маршрута рудничного поезда и устройство для его осуществления | 1979 |
|
SU870231A1 |
| Устройство для контроля и управления режимом работы роторного комплекса | 1984 |
|
SU1180461A1 |
| Устройство для контроля и управления режимом работы роторного комплекса | 1986 |
|
SU1421837A2 |
| Устройство для управления конвейерной линией | 1979 |
|
SU876525A1 |
| Устройство для дифференцированного учета материала, перемещаемого конвейером | 1977 |
|
SU748469A1 |
/-/
//
/2
