I UHeepmupyHJiuuu усилитель
30
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электроприводом одноковшового экскаватора и устройство для его осуществления | 1988 |
|
SU1629423A1 |
| Устройство для управления копающимМЕХАНизМОМ эКСКАВАТОРА | 1978 |
|
SU798251A1 |
| Устройство для ограничения динамических нагрузок копающих механизмов экскаватора | 1990 |
|
SU1740571A1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| Способ ограничения динамических нагрузок копающих механизмов экскаваторов и устройство для его осуществления | 1978 |
|
SU765470A1 |
| Устройство для управления копающими механизмами экскаватора | 1982 |
|
SU1082916A1 |
| Способ управления электроприводом напора экскаватора и устройство для его осуществления | 1986 |
|
SU1430475A1 |
| Способ управления копающим механизмом экскаватора и устройство для его осуществления | 1980 |
|
SU901417A1 |
| Устройство управления электроприводами копающих механизмов экскаватора | 1986 |
|
SU1511343A1 |
| Устройство управления электроприводами механизмов одноковшового экскаватора | 1989 |
|
SU1719561A1 |
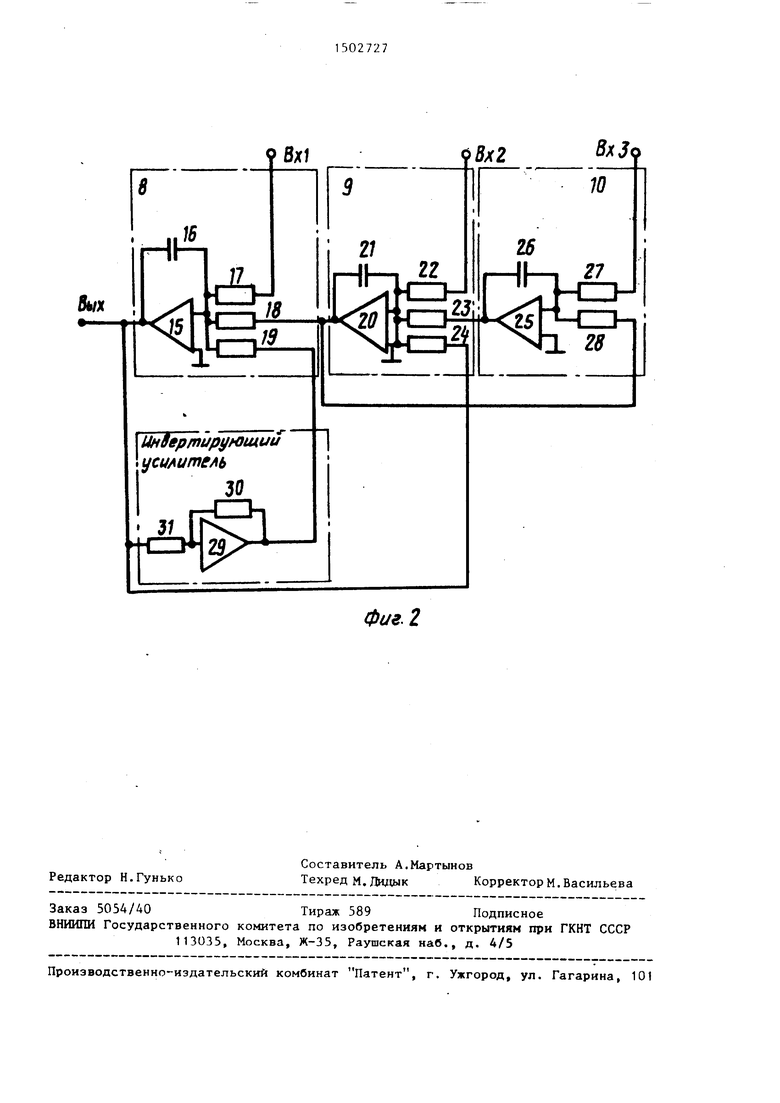
Изобретение относится к управлению электроприводами механизмов одноковшовых экскаваторов. Цель - повышение надежности работы экскаватора путем снижения динамических нагрузок в копающем механизме. Для этого устройство снабжено датчиком (Д) 14 упругого элемента (УЭ) 5, входы которого подключены к Д тока 12 и скорости 13, а выход - к третьему входу регулятора (Р) 7 снижения динамических нагрузок, к двум другим входам которого подключены выходы Д тока 12 и скорости 13. Выход Р 7 подключен к одному из входов сумматора 2, к другому входу которого подключен командоаппарат 1. Выход сумматора 2 соединен с преобразователем 3 электродвигателя 4, связанного механически с УЭ 5. Текущие значения скорости и тока и вычисленные значения усилия в УЭ 5 подаются на Р 7, который формирует управляющее воздействие, минимизирующее квадратичные отклонения тока, скорости и усилия в УЭ 5 от их установившихся значений при минимуме расхода энергии. С выхода Р 7 управляющий сигнал поступает на второй вход сумматора 2 и осуществляет снижение динамических усилий в УЭ 5. 1 з.п.ф-лы, 2 ил.
фиг. 2
| УСТРОЙСТВО ДЛЯ ОГРАНИЧЕНИЯ ДИНАМИЧЕСКИХ НАГРУЗОК В ЭКСКАВАТОРНЫХ МЕХАНИЗМАХ | 1972 |
|
SU412354A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство управления электроприводами эскаватора | 1986 |
|
SU1432150A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
