1
Изобретение относится к автоматическому управлению экскаваторами.
Известно устройство для ограничения дииамических нагрузок в экскаваторных Meixaнизмах, содержащие датчик тока, датчик скорости, блок дифференцирОБания и нелинейный элемент.
Целью .изобретения является снижение дефор маций в трансмиссии землеройной маши л ы.
Для этого предлагаемое устройство выполнено с блоком определения величииы нагрузки, состоящим из подключенного к датчику скорости дифференциатора, выход которого соединен с одним из входов подключенного другим входОМ 1к датчику тока сумматора, выход которого соединен со входом |блока дифференцирования.
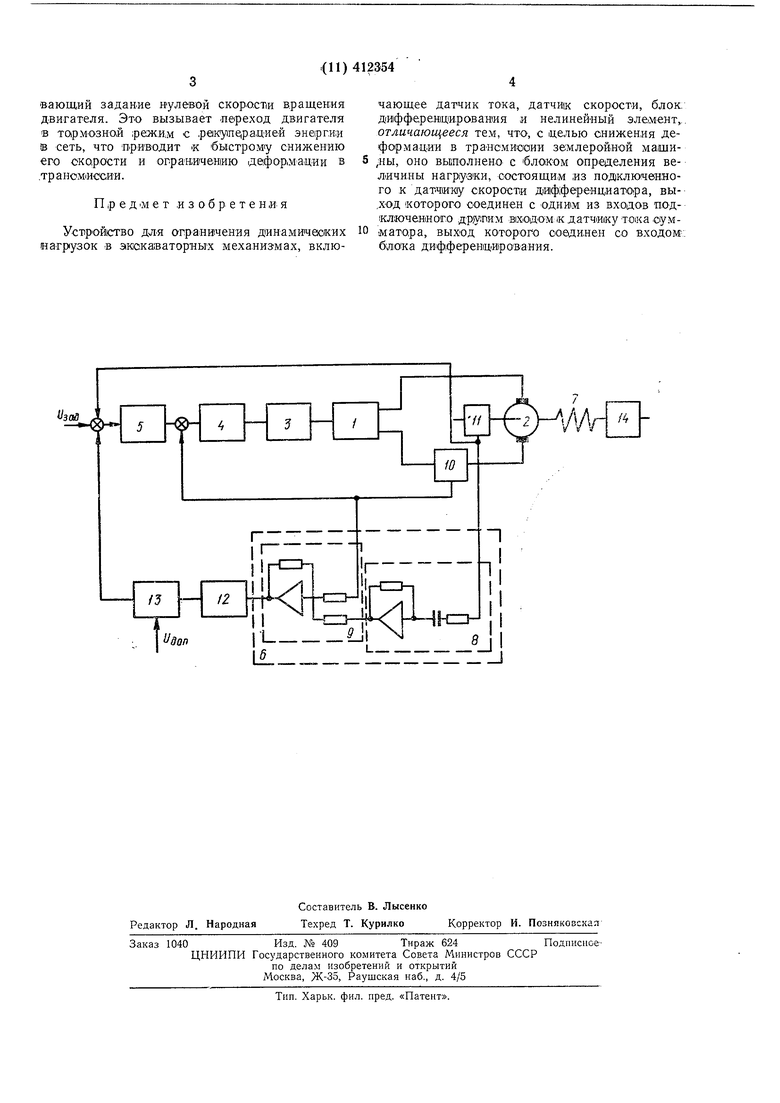
На чертеже изображено предлагаемое устройство.
Оно содержит тнристорный 1Преобразователь У, напряжение которого подается на двигатель 2 экскавато.рного Механизма, HanoHMeip подъемного, систему управления 3 тиргисторным преобразователем, регулятор 4 тОКа, регулятор 5 скорости, блок 6 определения величины нагрузки в тра:нсмиссии 7.
Блок определения величины нагрузхи состоит из последовательно соединенных дифференциатора 8 и сумматора 9. На два входа
этого блока подаются сигналы с датчика 10 тока и датчика 11 скорости. Выход блока определееия величины нагруз-ки соединен со ВХОДОМ блока 12 дифференцирования, выход которого подключен на один из входов нелинейного элемента 13. На другой вход этого элемента подан сигнал , пропорциональный допустимой величине нагрузки на рабочем органе. Выход нелинейного элемента 13 включен на оуммирующий вход регулятора скорости 5.
Устройство работает следующим образом.
увеличении нагрузки на ра-бочем органе 14 возрастает деформация в трансмиссии 7 между двигателем 2 и рабочил органом 14. Блок определения 6 нагрузки подает сигнал, пропорциональный этой деформации, на блок 12, осуществляющий двойное дифференцирование. Получаемая на выходе блока 12 вторая производная от деформации в трансмиссии примерно пропорциональна величине мгновенно прикладываемой к рабочему органу нагрузки в Момент ее возникновения.
Сигнал с выхода блока 6 сранивается в нелинейном элементе с велич чной f/доп, соответствующей предельно допустимой нагрузке, и в случае превышения его над Удоп, с выхода элемента 13 на суммирующий вход регулятора 5 скорости подается сигнал управления, подавляющий сигнал С/зад и обеспечивающий задание нулевой скор.асТ|И в.ращекия двигателя. Это вызывает переход двигателя В тормозной ;реж,И:М с .рвку1пе|рацией энергии в сеть, что -приводит « бы:стром1у снижению его oKopiOCTH и ограничению 1дефор, в .траномИссиИ.
П ip е д iM е т .изобретения
УстрОйство для ограничения динамических на-грузок в зк1ока1ваторных меха.низмах, включающее датчик тока, датчик скорости, блок, дифференцирования и нели.ней«ый элемент,,. отличающееся тем, что, с целью снижения деформа.ции в трансмиооии землеройной машиS ,иы, оно вьшолнено с блоком определения веЛ.ИЧИ.НЫ HarpiyisKH, состоящим из под ключенного .к датчику скорости диф;ференциато ра, вы,ход которого соединен с однвм из входов Т1.од ключен1ного друшим вкодом IK датчику тока сум10 матора, выход которого соединен со входом : бшок а д ифф ер .и1р ова ни я.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Способ управления электродвигателем скребкового конвейера и электропривод для его осуществления | 1988 |
|
SU1647839A1 |
| Устройство для управления @ -фазным реверсивным вентильным преобразователем | 1989 |
|
SU1837378A1 |
| Электропривод постоянного тока | 1989 |
|
SU1676052A1 |
| Способ управления автономнымэлЕКТРОпРиВОдОМ пОСТОяННОгО ТОКАгРузОпОд'ЕМНОгО МЕХАНизМА и уСТРОйСТВОдля ЕгО РЕАлизАции | 1979 |
|
SU843139A1 |
| Устройство для управления электроприводом промышленного робота | 1985 |
|
SU1265691A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2628757C1 |
| Следящая система с люфтом | 1981 |
|
SU1012194A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ АДАПТИВНЫЙ РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2015 |
|
RU2622183C2 |
| Устройство для ограничения динамических нагрузок копающих механизмов экскаватора | 1990 |
|
SU1740571A1 |
