Вид, 5
(Л
СП
О
о
Фиг.1
Изобретение относится к машиностроению и может быть использовано при автоматизации технологических процессов штамповочного производства, в качестве захватного устройства промышленных роботов.
Цель изобретения - расширение технологических возможностей за счет обеспечения захвата штампованных деталей сложной формы ложения.
На фиг, на фиг. 2 узел I на
не и.меюших устойчивого по1 изображен захват, разрез;
вид А на фиг. 1; на фиг. 3 - фиг. 1 (закрепление форсунки на воздуховоде).
Захват содержит корпус 1, на котором установлен улавливатель, состояший из козырька 2, двух щитов 3 и кармана 4, выполненного из сетчатого материала. В корпусе I установлен воздухопровод 5, имеющий щелевые отверстия для подвода сжатого воздуха к соплам 6. Крепление сопл 6 с помощью болтов 7 обеспечивает регулировку истечения сжатого воздуха по углу относительно горизонтали. В корпусе I на входе сжатого воздуха от магистрали смонтирован дроссельный винт 8. Плоскость Ъ образует зеркало щтампа (не показан) .
Пневматический захват работает следующим образом.
Рукой манипулятора захват вводится в рабочую зону щтампа и располагается па зеркале Б штампа, формируя вокруг дета- . 1И замкнутое пространство, образованное козырьком 2, щитками 3 и карманом 4. При этом деталь располагается между соплами б и карманом 4.
При подаче сжатого воздуха на con. ia 6 под действием направленного воздушного потока ограниченная в пространстве деталь перемещается в полость кармана 4. Так как карман 4 выполнен из сетчатого материала.
5
то воздушный поток свободно, без завихрений проходит сквозь сетку, обтекая контур детали со всех сторон, а упругие силы воздушной струи прижимают ее к сетке и, таким образом, удерживают в кармане 4 улавливателя.
С помощью дроссельного винта 8 регулируется сечение входного отверстия от магистрали сжатого воздуха, что позволяет выполнять настройку оптимального усилия
воздушной струи, истекающей из сопл 6. Клеммное крепление сопл 6 на воздухопроводе 5 обеспечивает возможность формирования оптимального сечения воздушного но- тока, обтекающего контур детали, тем самым обеспечивая надежность захвата и удержания детали в процессе манипулирования. После переноса детали из зоны штампа на другую рабочую позицию, по команде управления происходит перекрытие магистрали сжатого воздуха и деталь, осво0 бодивп1ись от прижимного усилия воздушной струи, под действием собственного веса выпадает из полости кармана 4, попадая в тару.
Формула изобретения
Пневматический захват, содержащий корпус, в котором выполнены каналы для подвода сжатого воздуха, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен улавливателем, верхняя часть которого образована козырьком, боковые стороны ограничены двумя щитками, закрытыми со стороны корпуса карманом, выполненным из сетчатого материала, воздуховодом, образующим внешний 5 контур захвата, и соплами, уста1 овленными на воздуховоде с возможностью регулировоЧо на воздуховоде с возможностью ре1улиров- ки угла поворота оси сопл относительно горизонтали и направленными в сторону сетчатого кар.мана.
0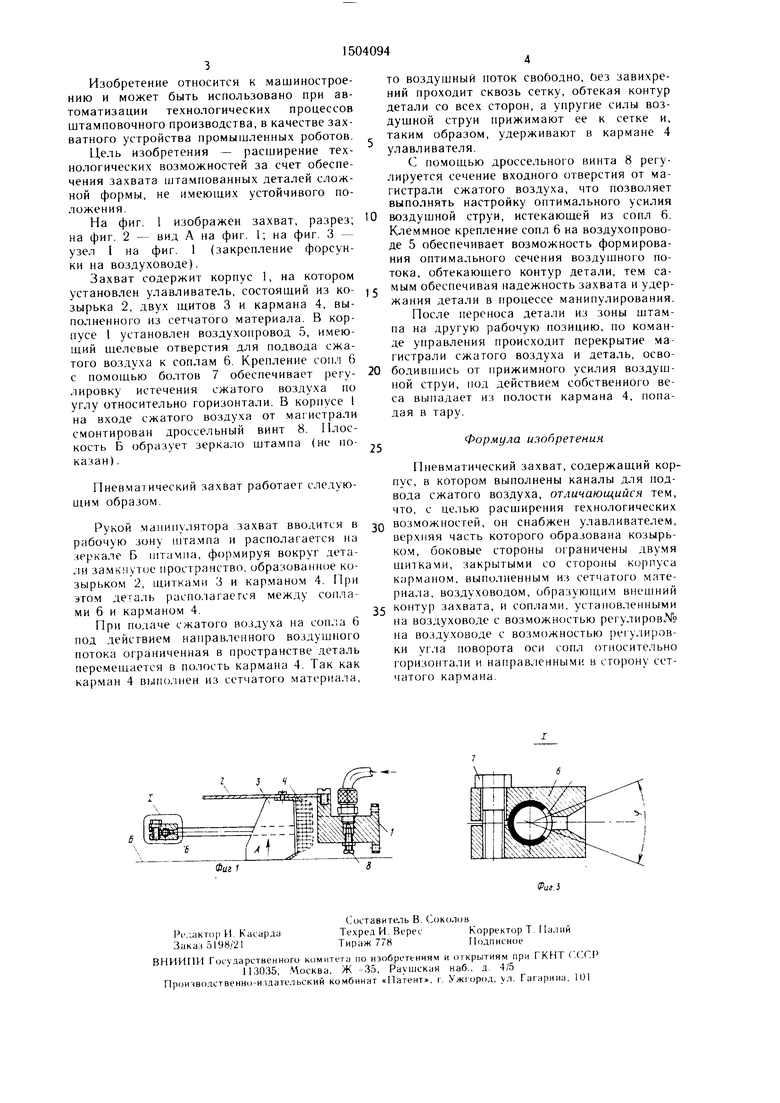
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для снижения гидродинамического сопротивления днища корпуса судна на сжатом пневмопотоке | 2019 |
|
RU2711129C1 |
| Клещевой захват | 1979 |
|
SU1069921A1 |
| Жатка зерноуборочной машины | 1982 |
|
SU1355157A1 |
| Устройство для ориентированной подачи деталей,преимущественно технологических спутников-носителей интегральных схем | 1980 |
|
SU1115259A2 |
| Устройство для отделения корнеклубнеплодов от комков почвы | 1981 |
|
SU978766A1 |
| ФЛОТАЦИОННАЯ МАШИНА ДЛЯ ПЕННОЙ СЕПАРАЦИИ ЯЧУШКО | 2005 |
|
RU2289479C9 |
| Штамп для изготовления конусных деталей | 1983 |
|
SU1139550A1 |
| Способ упрочнения стекла и устройство для его осуществления | 1983 |
|
SU1232142A3 |
| Устройство для удаления деталей из рабочей зоны пресса | 1981 |
|
SU965570A1 |
| Робот к штамповочному прессу | 1988 |
|
SU1538966A1 |
Изобретение относится к машиностроению и может быть использовано при автоматизации технологических процессов штамповочного производства в качестве захватного устройства промышленных роботов. Цель изобретения - расширение технологических возможностей за счет обеспечения захвата штампованных деталей сложной формы, не имеющих устойчивого положения. Захват содержит корпус 1, через который проходит воздухопровод 5. К корпусу захвата прикреплен улавливатель, состоящий из козырька 2, щитков 3 и сетчатого кармана 4. На воздухопроводе 5 установлены сопла с возможностью регулировки угла поворота их осей относительно горизонтали. При подаче сжатого воздуха образуемый соплами воздушный поток перемещает деталь с зеркала штампа в карман улавливателя. После переноса детали на рабочую позицию магистраль сжатого воздуха перекрывается и деталь под действием собственного веса выпадает из полости кармана. 3 ил.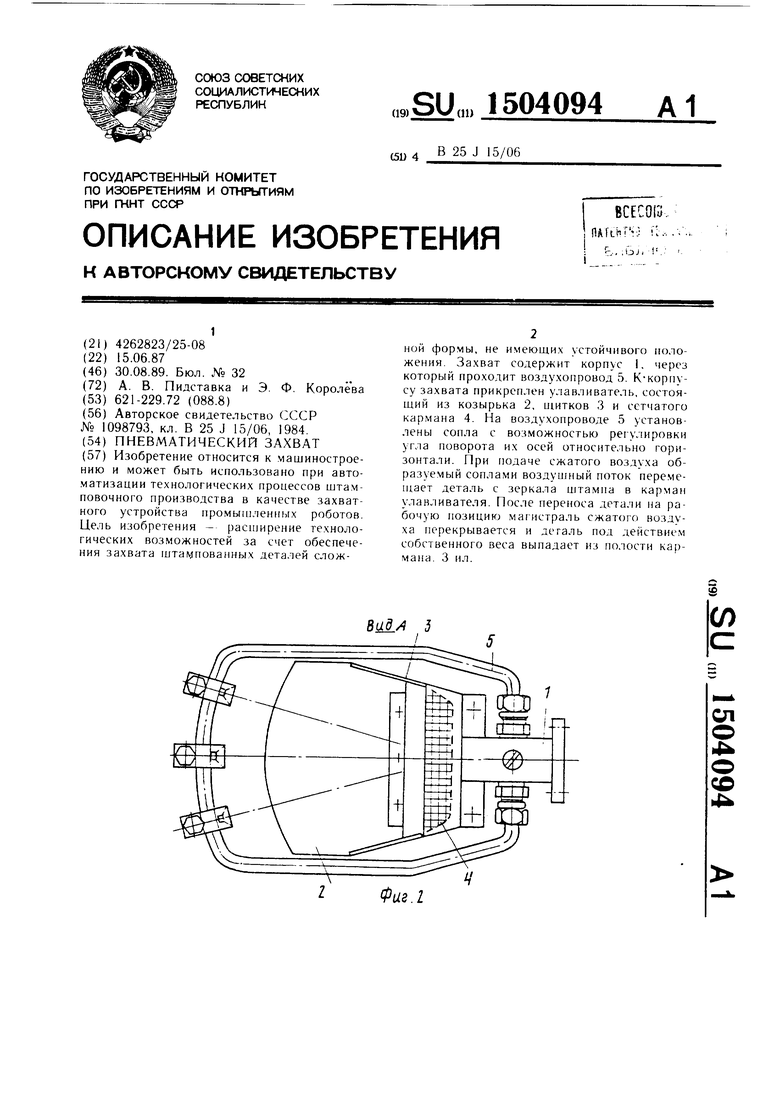
| Пневматический захват | 1983 |
|
SU1098793A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
