3- 15111154
чении муфт 10 и 22 колесо 8 вращает- хвата вращаться вокруг оси Ot-0, , Тася с редукцией ij, а связанное с ним колесо 19, перекатываясь по зубчатому сектору 20, заставляет корпус 1 за- с
КИМ образом,от одного привода получается три разных движения,3 ил.
хвата вращаться вокруг оси Ot-0, , Та
КИМ образом,от одного привода получается три разных движения,3 ил.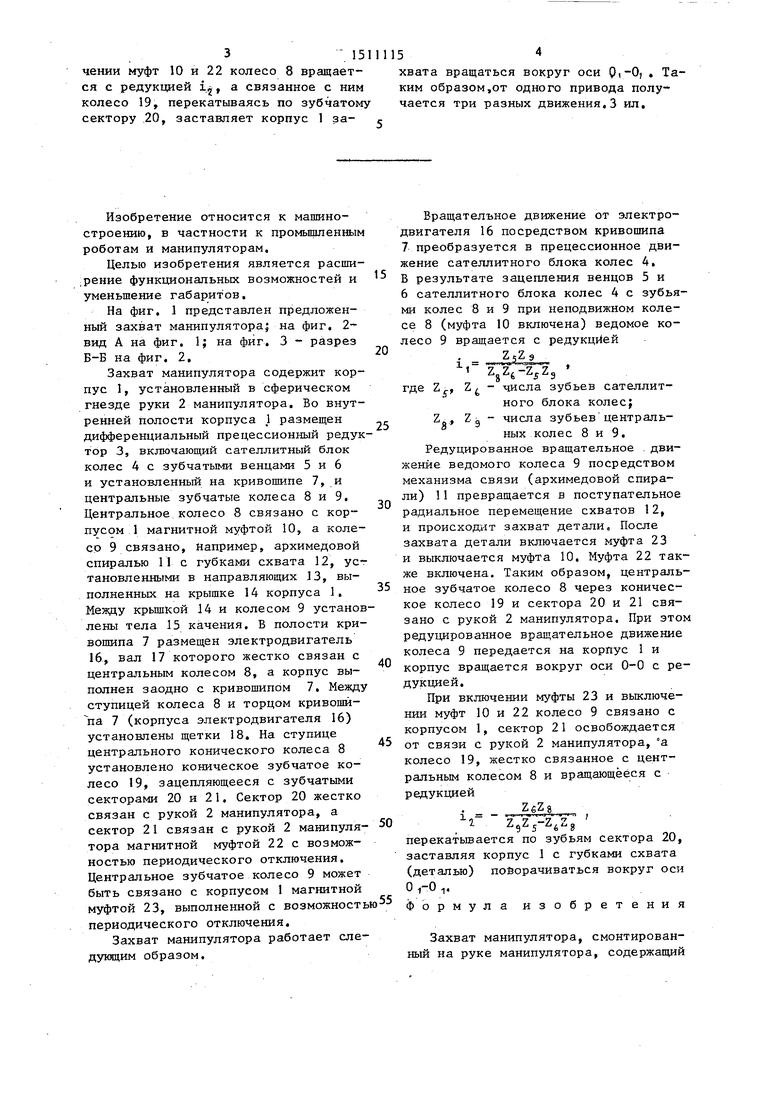
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1987 |
|
SU1451004A1 |
| Захват манипулятора | 1988 |
|
SU1593950A1 |
| Манипулятор | 1986 |
|
SU1357220A1 |
| Захват промышленного робота | 1988 |
|
SU1583285A1 |
| Манипулятор | 1987 |
|
SU1511120A1 |
| ПРЕЦЕССИОННАЯ ПЕРЕДАЧА | 1990 |
|
RU2099614C1 |
| Манипулятор | 1987 |
|
SU1465301A1 |
| Сборочная головка | 1989 |
|
SU1713768A1 |
| Стержневой манипулятор | 1989 |
|
SU1641605A1 |
| Привод арматуры | 1992 |
|
SU1807278A1 |
Изобретение относится к промышленным роботам и манипуляторам. Цель изобретения - расширение функциональных возможностей и уменьшение габаритов. Захват манипулятора содержит корпус 1, в котором размещен дифференциальный прецессионный редуктор 3, включающий сателлитный блок колес 4, установленный на кривошипе 7 и центральные колеса 8 и 9. В полости кривошипа размещен электродвигатель 16. Центральное колесо 8 связано посредством конического колеса 19 и зубчатых секторов 20 и 21 с рукой 2 манипулятора. Колесо 9 связано с губками схвата 12, которые установлены в направляющих 13. При включенном состоянии муфт 10, 22 колесо 8 неподвижно, колесо 9 вращается с редукцией I1, а губки схвата 12 перемещаются в радиальном направлении. При включении муфты 23 и выключении муфты 10 корпус 1 вращается вокруг оси 0-0. При включении муфты 23 и выключении муфт 10 и 22 колесо 8 вращается с редукцией I2 , а связанное с ним колесо 19, перекатываясь по зубчатому сектору 20, заставляет корпус 1 захвата вращаться вокруг оси 01-01. Таким образом от одного привода получается три разных движения. 3 ил.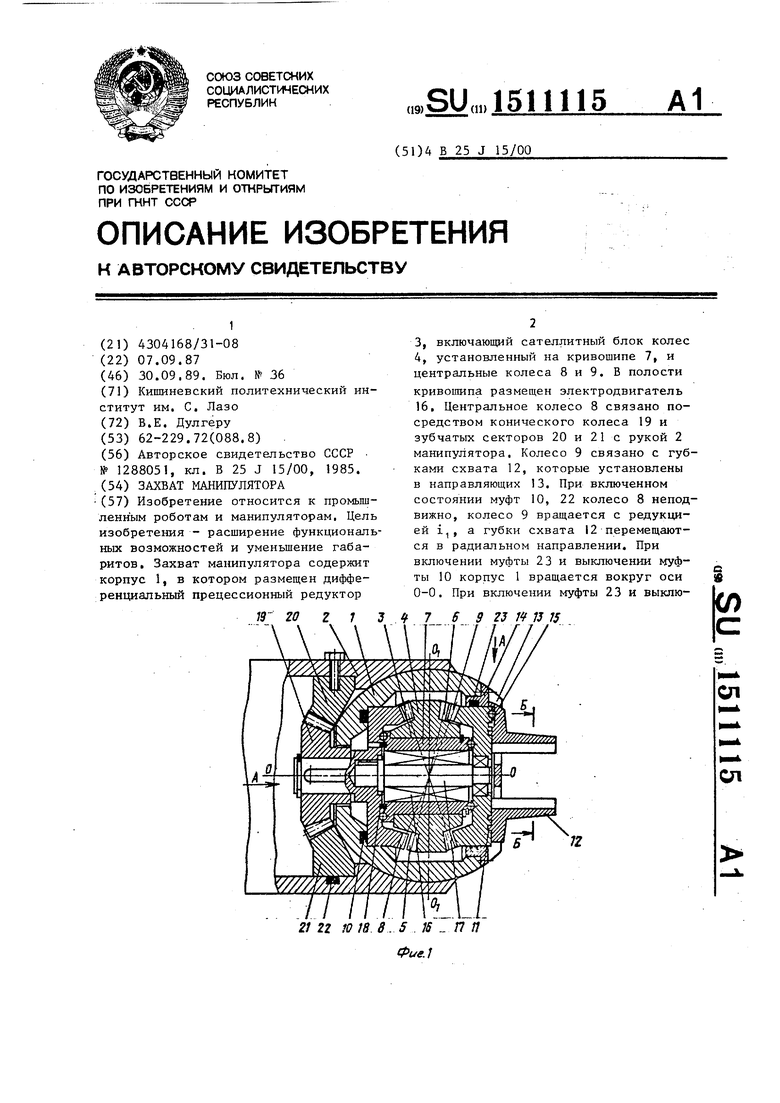
Изобретение относится к машиностроению, в частности к промьщшенным роботам и манипуляторам.
Целью изобретения является расши- ;рение функциональных возможностей и уменьшение габаритов,
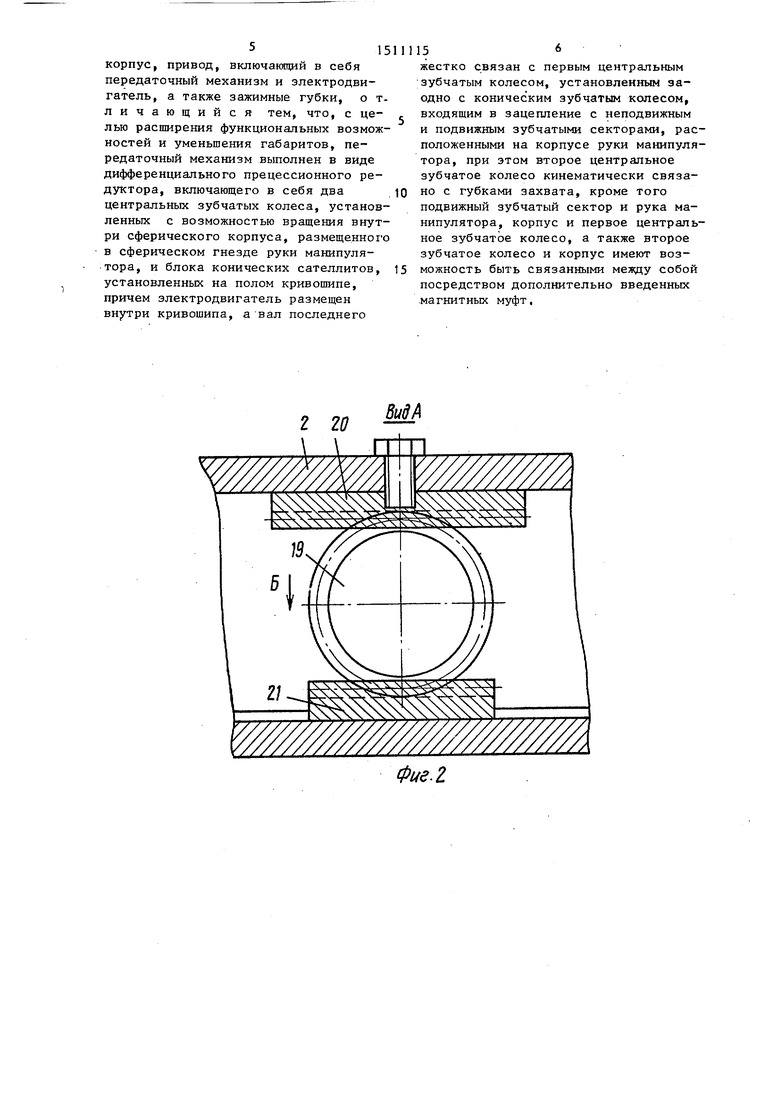
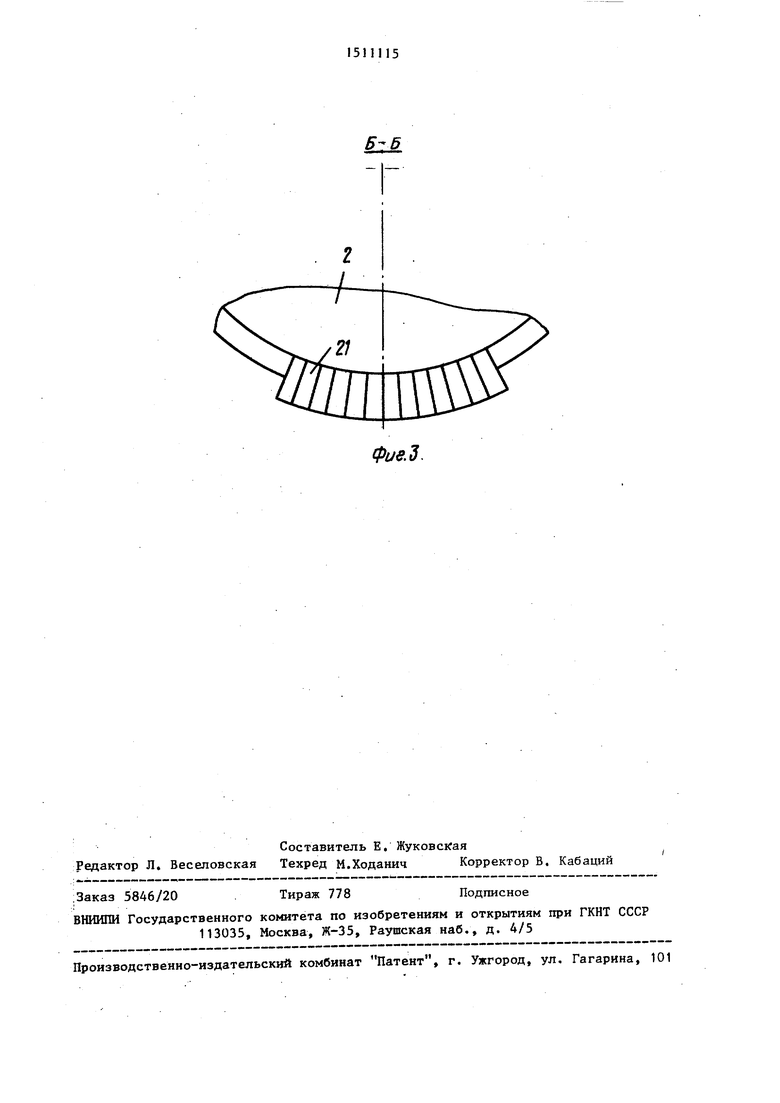
На фиг, J представлен предложенный захват манипулятора; на фиг, 2- вид А на фиг, 1; на фиг, 3 - разрез Б-Б на фиг, 2,
Захват манипулятора содержит корпус 1, установленный в сферическом гнезде руки 2 манипулятора. Во внутренней полости корпуса .1 размещен дифференциальный прецессионный редуктор 3, включающий сателлитный блок колес 4 с зубчатыми венцами 5 и 6 и установленный на кривошипе 7, И центральные зубчатые колеса 8 и 9, Центральное колесо 8 связано с корпусом 1 магнитной муфтой 10, а колесо 9 связано. Например, архимедовой спиралью 11 с губками схвата 12, установленными в направляющих 13, выполненных на крышке 14 корпуса 1, Между крышкой 14 и колесом 9 установлены тела 15 качения, В полости кривошипа 7 размещен электродвигатель 16, вал 17 которого жестко связан с центральным колесом 8, а корпус выполнен заодно с кривошипом 7, Между ступицей колеса 8 и торцом кривошй- па 7 (корпуса электродвигателя 16) установлены щетки 18. На ступице центрального конического колеса 8 установлено коническое зубчатое колесо 19, зацепляющееся с зубчатыми секторами 20 и 21, Сектор 20 жестко связан с рукой 2 манипулятора, а сектор 21 связан с рукой 2 манипуля- тора магнитной муфтой 22 с возможностью периодического отключения. Центральное зубчатое колесо 9 может быть связано с корпусом 1 магнитной муфтой 23, выполненной с возможность периодического отключения.
Захват манипулятора работает следующим образом.
0
0
.0
5
5
Вращательное движение от электродвигателя 16 посредством кривошипа
7преобразуется в прецессионное движение сателлитного блока колес 4,
8результате зацепления венцов 5 и
6 сателлитного блока колес 4 с зубьями колес 8 и 9 при неподвижном колесе 8 (муфта 10 включена) ведомое колесо 9 вращается с редукцией
i Д5
1 ZjZj-Z Zg
где Z,, i числа зубьев сателлитного блока колес} Z., 3 числа зубьев центральных колес 8 и 9,
Редуцированное вращательное . движение ведомого колеса 9 посредством механизма связи (архимедовой спирали) 11 превращается в поступательное радиальное перемещение схватов 12, и происходит захват детали. После захвата детали включается муфта 23 и выключается муфта 10, Муфта 22 также включена. Таким образом, центральное зубчатое колесо 8 через коническое колесо 19 и сектора 20 и 21 связано с рукой 2 манипулятора. При этом редуцированное вращательное движение колеса 9 передается на корпус 1 и корпус вращается вокруг оси 0-0 с редукцией.
При включении муфты 23 и выключении муфт 10 и 22 колесо 9 связано с корпусом 1, сектор 21 освобождается от связи с рукой 2 манипулятора, а колесо 19, жестко связанное с центральным колесом 8 и вращающееся с редукцией
i -..... ,. ,
о77 -7
б
перекатьшается по зубьям сектора 20, заставляя корпус 1 с губками схвата (деталью) поворачиваться вокруг оси О 1-0 1, Формула изобретения
Захват манипулятора, смонтированный на руке манипулятора, содержащий
51511
корпус, привод, включающий в себя передаточный механизм и электродвигатель, а также зажимные губки, о т. личающийся тем, что, с целью расширения функциональных возможностей и уменьшения габаритов, передаточный механизм выполнен в виде дифференциального прецессионного редуктора, включающего в себя два ю центральных зубчатых колеса, установленных с возможностью вращения внутри сферического корпуса, размещенного в сферическом гнезде руки манипулятора, и блока конических сателлитов, 15 установленных на полом кривошипе, причем электродвигатель размещен внутри кривошипа, а вал последнего
2 20
156
жестко связан с первым центральным зубчатым колесом, установленным эа- одно с коническим зубчатым колесом, входящим в зацепление с неподвижным и подвижным зубчатыми секторами, расположенными на корпусе руки манипулятора, при этом второе центральное зубчатое колесо кинематически связано с губками захвата, кроме того подвижный зубчатый сектор и рука манипулятора, корпус и первое центральное зубчатое колесо, а также второе зубчатое колесо и корпус имеют возможность быть связанными между собой посредством дополнительно введенных .магнитных муфт,
ВидА
Фие.г
Составитель Е, Жуковская
Редактор Л, Весеповская Техред М.Ходанич
Заказ 5846/20
Тираж 778
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул, Гагарина, 101
Фие.З.
Корректор В. Кабаций
Подписное
| Захват промышленного робота | 1985 |
|
SU1288051A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
