
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления вибропогружателем | 1983 |
|
SU1157165A1 |
| Привод центрифуги | 1987 |
|
SU1505789A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Частотно-регулируемый электропривод | 1987 |
|
SU1434530A1 |
| Система управления пылесосом | 1991 |
|
SU1771684A1 |
| Система частотно-регулируемого асинхронного электропривода крано-манипуляторной установки (Система ЧРАП КМУ) | 2023 |
|
RU2820159C1 |
| Устройство управления свайным вибропогружателем | 1986 |
|
SU1432139A1 |
| Электропривод | 1989 |
|
SU1624642A1 |
Изобретение относится к строительным машинам, преимущественно для вибропогружения и виброизвлечения свай, шпунта и свай-оболочек. Целью изобретения является повышение надежности работы системы. Система управления содержит вибропогружатель 1, два асинхронные трехфазные электродвигателя 2 и 3, блоки 4 и 5 токовой защиты, релейный блок 6 включения, блок 9 динамического торможения, регулятор 10, интегратор 11, задатчики 14 и 15 режима. 1 ил.
31
Изобретение относится к строительным машинам, преимущественно для вибропогружения и виброизвлечения свай, шпунта и свай-оболочек.
Целью изобретения является повышение надежности работы системы„
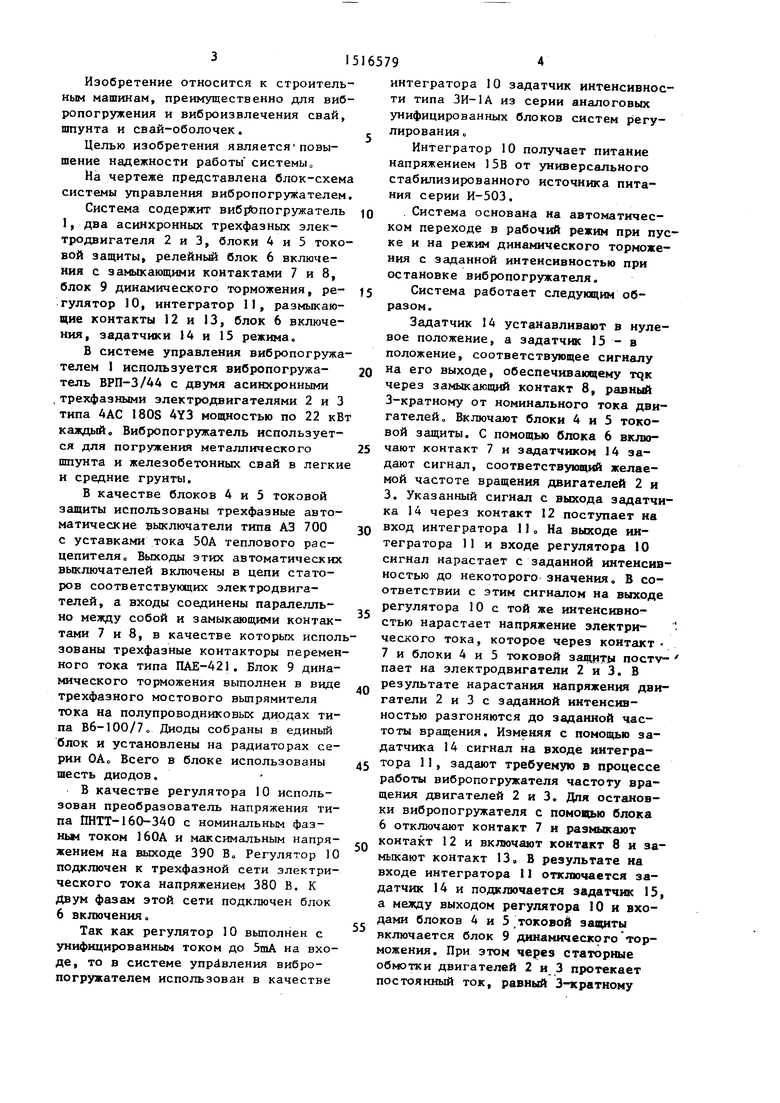
На чертеже представлена блок-схема системы управления вибропогружателем
Система содержит вибрйэпогружатель 1, два асинхронных трехфазных электродвигателя 2 и 3, блоки 4 и 5 токовой защиты, релейньй блок 6 включения с замыкающими контактами 7 и 8, блок 9 динамического торможения, регулятор 10, интегратор П, размыкающие контакты 12 и 13, блок 6 включения, задатчики 14 и 15 режима,
В системе управления вибропогружателем 1 используется вибропогружатель ВРП-3/4А с двумя асинхронными трехфазными электродвигателями 2 и 3 типа ААС 180S 4Y3 мощностью по 22 кВ каждый. Вибропогружатель используется для погружения металлического шпунта и железобетонных свай в легки и средние грунты.
В качестве блоков 4 и 5 токовой защиты использованы трехфазные автоматические выключатели типа A3 700 с уставками тока 50А теплового рас- цепителЯо Выходы этих автоматических выключателей включены в цепи статоров соответствующих электродвигателей, а входы соединены паралелль- но между собой и замыкающими контактами 7 и 8, в качестве которых исползованы трехфазные контакторы переменного тока типа ПАЕ-421. Блок 9 динамического торможения выполнен в виде трехфазного мостового выпрямителя тока на полупроводниковых диодах типа Вб-100/7„ Диоды собраны в единый блок и установлены на радиаторах серии ОАо Всего в блоке использованы шесть диодов.
В качестве регулятора 10 использован преобразователь напряжения типа ЙНТТ-160-340 с номинальным фаз- ньм током 160А и максимальным напряжением на выходе 390 В Регулятор 10 подключен к трехфазной сети электрического тока напряжением 380 В. К Двум фазам этой сети подключен блок 6 включения g
Так как регулятор 10 вьтолнен с унифицированным током до 5mA на входе, то в системе управления вибропогружателем использован в качестве
0
5
0
5
65794
интегратора 10 задатчик интенсивности типа ЗИ-1А из серии аналоговых унифицированных блоков систем регулирования
Интегратор 10 получает питание напряжением 15В от универсального стабилизированного источника питания серии И-503.
, Система основана на автоматическом переходе в рабочий режим при пуске и на режим динамического торможения с заданной интенсивностью при остановке вибропогружателя.
Система работает следующим образом.
Задатчик 14 устанавливают в нулевое положение, а задатчик 15 - в положение, соответствующее сигналу на его выходе, обеспечивающему TQK через замыкающий контакт 8, равный 3-кратному от номинального тока двигателей. Включают блоки 4 и 5 токовой защиты. С помощью блока 6 включают контакт 7 и задатчиком 14 задают сигнал, соответствующий желаемой частоте вращения двигателей 2 и 3. Указанный сигнал с выхода задатчи- ка 14 через контакт 12 поступает на вход интегратора 11„ На выходе интегратора 11 и входе регулятора 10 сигнал нарастает с заданной интенсивностью до некоторого значения, В соответствии с этим сигналом на выходе регулятора 10 с той же интенсивностью нарастает напряжение электри- ческого тока, которое через контакт 7 и блоки 4 и 5 токовой защити посту- пает на электродвигатели 2 и 3. В результате нарастания напряжения двигатели 2 и 3 с заданной интенсивностью разгоняются до задаиной частоты вращения. Изменяя с помощью задатчик а 14 сигнал на входе интегра- 5 тора 11, задают требуемую в процессе работы вибропогружателя частоту вращения двигателей 2 и 3. Для остановки вибропогружателя с помощью блока 6 отключают контакт 7 и размыкают контакт 12 и включают контакт 8 и замыкают контакт 13, В результате на входе интегратора II отключается задатчик 14 и подключается задатчик 15, а между выходом регулятора 10 и входами блоков 4 и 5 токовой защиты включается блок 9 динамического торможения. При этом через статорные обмотки двигателей 2 и 3 протекает постоянный ток, равный 3-кратному
0
5
0
0
5
номинальному току двигателей. Постоянный ток способствует затормаживанию с заданной интенсивностью двигателей 2 и 3, что обеспечивает быстрое прохождение резонансных частей. Через заданное время с помощью блока 13 отключится контакт 7, контакт 13 разомкнется, а контакт 12 замкнется и систек придет в исходное состояние.
Применение данной системы позволит снизить динамические нагрузки на элементы вибропогружателя и мощность источников электроэнергии.
Экономический эффект от использования изобретения на одном вибропогружателе составляет А200 руб.
Формула изобретения
Система управления вибропогружателем, содержащая релейный блок включения, два асинхронных трехфазных электродвигателя с соответствующими блоками токовой защиты и трехфазный
источник питания,отличающая с я тем, что, с целью повышения надежности работы системы, она снабжена регулятором, интеграто- ером, двумя задатчиками режима и блоком динамического торможения, причем один из датчиков -режима через размыкающий контакт релейного блока
включения, а другой задатчик режима через первый замыкающий контакт этого блока подключены к входу интегратора, выход которого соединен с одним из входов регулятора, другие
входы которого соединены с трехфазным источником питания, к двум фазам которого подключен релейный блок включения, выход регулятора подключен к одной из клемм второго замыкающего контакта релейного блока
включения и к входу блока динамического торможения, выход которого и другая клемма второго замыкающего контакта релейного блока включения
подключены к входам блоков токовой защиты.
| Система управления вибропогружателем | 1983 |
|
SU1157165A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Указания по.эксплуатации и ремонту вибропогружателей и вибромолотов в транспортном строительстве | |||
| Мо: Оргтранстрой, 1976, с.88. | |||
